литература / Sharapov_V._Datchiki
.pdfГлава 13. Датчики вибраций
Рис. 13.13. Тензометрический вибродатчик [10]: 1 — корпус; 2 — крышки; 3 — штифты; 4, 6 — стаканы; 5 — гайка; 7 — винты; 8 — прокладка; 9 — мастика; 10 — жилы кабеля; 11 — выводы; 12 — втулка; 13 — гайка
Штифты 3 исключают проворот стаканов. Крышки 2 запрессованы в корпус 1. Датчик с помощью гайки 5 с конической резьбой крепится к объекту.
13.6. Емкостные датчики
Емкостные датчики преобразуют механическое перемещение (линейное или угловое) в изменение электрической емкости конденсатора. Как известно, емкостный датчик представляет собой конденсатор, состоящий из двух или более пластин, разделенных слоем воздуха или другим диэлектриком (см. гл. 8).
Емкость плоского конденсатора определяется известной формулой
C |
s |
, |
(13.9) |
|
|
||||
|
|
|
где — диэлектрическая проницаемость среды между пластинами конденсатора; s — площадь пластины; — величина зазора между пластинами.
Из приведенной формулы видно, что изменения емкости можно достигнуть путем изменения значения одной из величин , s и . Соответственно могут быть изготовлены различные типы емкостных датчиков, в которых, в зависимости от измеряемого виброперемещения, изменяется один из этих параметров, а остальные остаются постоянными.
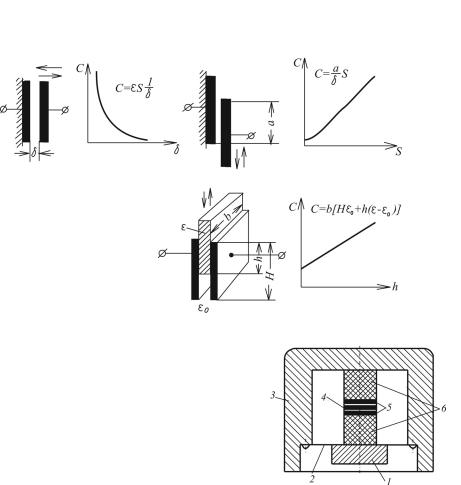
На рис. 13.14 приведены принципиальные схемы емкостных датчиков перемещения и их характеристики в зависимости от изменяемого параметра.
Различают три типа емкостных датчиков перемещения: датчики с переменным зазором; датчики с переменной площадью пластин конденсатора; датчики с переменной диэлектрической проницаемостью.
На рис. 13.15 показана схема емкостного датчика ускорения с плоским конденсатором и переменным зазором. Сейсмическая масса 1 закреплена на жесткой металлической плоской мембране 2, обеспечивающей достаточно вы-
13.7. Электронно-механические датчики перемещения
а) |
б) |
Рис. 13.14. Принципиальные
схемы емкостных |
датчиков |
перемещения с их характе- |
|
ристиками |
в) |
Рис. 13.15. Емкостный датчик ускорения: 1 — инерционная масса; 2 — мембрана; 3 — корпус; 4 — слюдяная пластинка; 5 — электроды; 6 — прокладка
сокую частоту собственных колебаний подвеса. Нижняя обкладка конденсатора 5 через изолирующую прокладку 6 соединена с мембраной 2, а верхняя обкладка через изолирующую прокладку 6 — с корпусом 3.
Для увеличения емкости и предохранения от замыкания и пробоя в зазор между обкладками конденсатора введен твердый диэлектрик — тонкая слюдяная пластинка 4. Под действием вибрации меняется зазор между обкладками, а следовательно, и величина емкости конденсатора.
13.7.Электронно-механические датчики перемещения
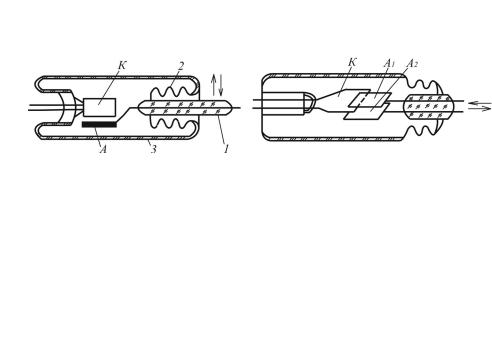
На рис. 13.16, а приведена схема двухэлектродного электронно-механического датчика с продольным управлением. Датчик снабжен неподвижным плоским катодом К с косвенным подогревом и плоским подвижным анодом А, укрепленным на стержне 1, который перемещается с упругим стеклянным сильфоном 2, впаянным в стенку баллона лампы 3. Электроды — катод и анод — расположены параллельно друг другу.
13.9. Магнито-резистивные датчики
а) |
б) |
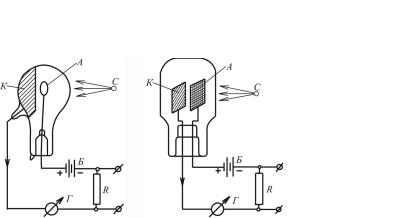
Рис. 13.17. Включение фотоэлемента с внешним фотоэффектом
Катод и анод фотоэлемента помещаются в стеклянной колбе. Фотокатодом служит щелочноземельный металл, наносимый обычно на серебряную подложку, осажденную непосредственно на стеклянной колбе с внутренней стороны (рис. 13.17, а) или на специальной пластинке К (рис. 13.17, б). Анодом служит металлическое кольцо или сетка, имеющие форму, обеспечивающую попадание света на катод.
Для измерения фототока, возникающего в цепи фотоэлемента при освещении его источником света С, фотоэлемент последовательно с гальванометром Г и сопротивлением R присоединяется к источнику питания Б (см. гл. 18).
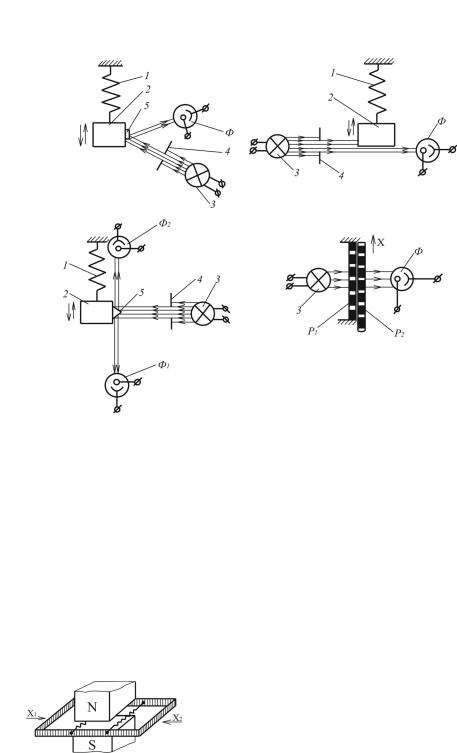
На рис. 13.18. показано несколько способов получения сигнала в фотоэлектрических датчиках.
На рис. 13.18, а интенсивность луча меняется за счет изменения действующей поверхности зеркала. В конструкции, приведенной рис. 13.18, б, объект является своего рода подвижной ширмой, и поэтому не требуется введения никаких дополнительных элементов. На рис. 13.18, в изображена дифференциальная схема фотоэлектрического датчика с подвижной призмой. Здесь два фотоэлемента включены в мостовую схему. На рис. 13.18, г изображена схема фотоэлектрического датчика с заслонкой в виде сдвоенной решетки. Такой датчик позволяет получить высокую чувствительность к малым перемещениям.
Характерной особенностью фотоэлектрических датчиков является то, что вибрирующий элемент не связывается механически с какими-либо деталями и, следовательно, трение исключается.
Этот бесконтактный метод измерения может быть с успехом применен при исследовании вибрации небольших и легких объектов, к которым другие типы датчиков не могут быть прикреплены без нарушения нормальной работы объекта.
В качестве чувствительных элементов фотодатчиков вибрации могут использоваться также фотосопротивления, фотодиоды, фототранзисторы (см. гл. 18).
13.9. Магнито-резистивные датчики
Датчики этого типа основаны на изменении омического сопротивления некоторых материалов в магнитном поле. При перемещении проводника из такого материала в однородном магнитном поле величина сопротивления проводника изменяется в зависимости от его расположения [7] (см. гл. 10).
Глава 13. Датчики вибраций
а) |
б) |
г)
в)
Рис. 13.18. Способы получения сигнала в фотоэлектрических датчиках: 1 — пружина; 2 — инерционный грузик; 3 — источник света; 4 — щель; 5 — зеркало или призма; Ф, Ф1 и Ф2 — фотоэлементы; Р1 — неподвижная решетка; Р2 — подвижная решетка
Как известно, висмут является одним из материалов, который изменяет свое сопротивление в магнитном поле.
Чувствительность магнито-омического датчика (рис. 13.19)
R
|
S |
R |
, |
|
(13.11) |
|
|
|
|
||||
|
|
H |
|
|
||
где R — относительное изменение сопротивления; Н — напряженность маг- |
||||||
R |
|
|
|
|
|
|
нитного поля в А/см. |
|
|
|
|
|
|
|
Погрешности этих датчиков определяются |
|||||
|
влиянием температуры на сопротивление ра- |
|||||
|
бочего проводника и на величину чувствитель- |
|||||
|
ности материала к магнитному полю. Некото- |
|||||
|
рое уменьшение погрешностей может быть до- |
|||||
|
стигнуто |
применением |
дифференциальных |
|||
Рис. 13.19. Магнито-резистив- |
схем. Здесь целесообразно применять компен- |
|||||
сационные |
схемы, так как они полностью |
|||||
ный (висмутовый) датчик пере- |
||||||
устраняют температурные погрешности. |
||||||
мещения |
||||||
13.10.Пьезоэлектрические акселерометры
13.10.Пьезоэлектрические акселерометры
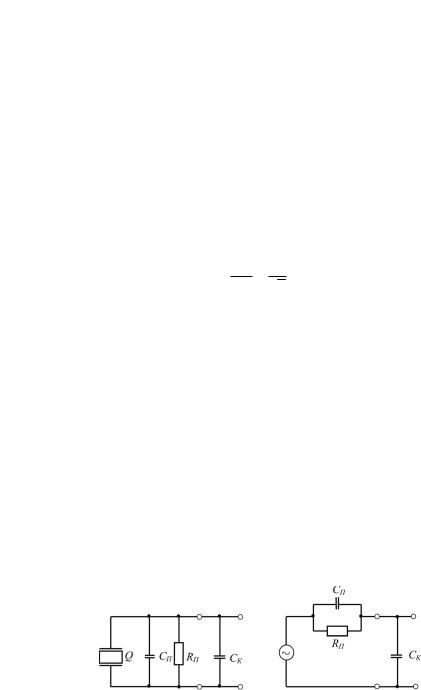
Среди различных типов датчиков вибраций к настоящему времени наибольшее распространение получили пьезоэлектрические вибродатчики (акселерометры) [22, 23].
Это обусловлено рядом достоинств пьезоэлектрических датчиков (см. гл. 9). Входным воздействием для пьезоэлектрических акселерометров является сила
F m |
d 2 x |
, |
(13.12) |
dt 2
где m — инерционная (сейсмическая) масса акселерометра; d 2 x — ускорение dt 2
вибрации.
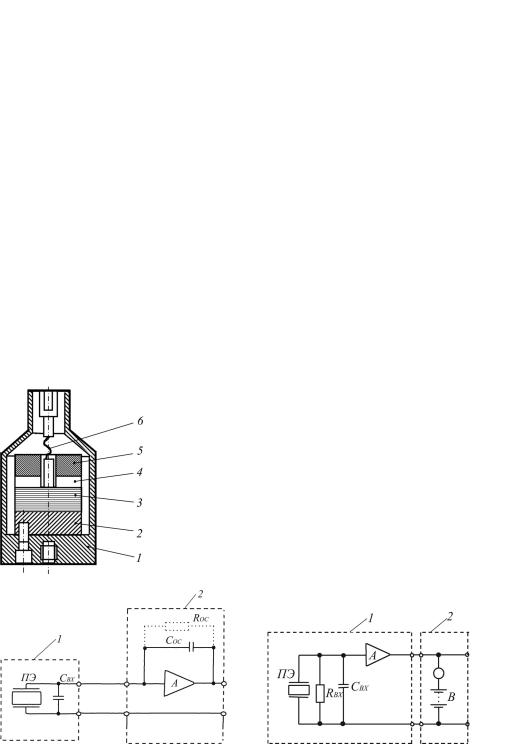
Обычно чувствительный элемент (сенсор) пьезоэлектрического акселерометра состоит из пьезоэлемента, инерционной массы и упругого элемента. Чувствительный элемент устанавливается в корпус, который, в свою очередь, может состоять из основания и крышки, встроенного усилителя и разъема для подсоединения кабеля. Чувствительный элемент, состоящий из указанных выше элементов, называется многоэлементным (или полиморфным) [2, 3].
Между тем, известны акселерометры, в которых пьезоэлемент, инерционная масса, упругий элемент и основание состоят из одного монолитного пьезоэлектрического блока [6, 7]. Такой акселерометр называют монолитным или мономорфным.
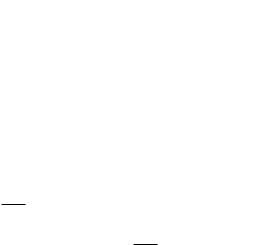
В связи с этим предложена классификация акселерометров (рис. 13.20) по количеству элементов (монолитные и многоэлементные), по виду используемого пьезоэффекта (на прямом пьезоэффекте и резонансные), по виду волн (на объемных волнах и поверхностных акустических волнах), по виду используемого пьезоэлектрического материала (монокристаллические и пьезокерамические). Многоэлементные акселерометры могут содержать моноэлементные пьезоэлементы (один или несколько), биморфные и триморфные пьезоэлементы.
Монолитные акселерометры
Пьезоэлектрические акселерометры выполняются, как отмечалось, в виде сборных конструкций, т.е. состоят из соединенных между собой тем или иным способом отдельных элементов.
Использование различных конструкционных материалов, а также наличие недостаточно стабильных и трудно контролируемых механических соединений отрицательно сказывается на стабильности и повторяемости рабочих характеристик акселерометров, а высококачественная обработка контактирующих поверхностей, необходимость доводки в процессе сборки и регулировки повышает их себестоимость [23].
Свойство пьезокерамики приобретать пьезоактивность только на участках, к которым в процессе поляризации приложено электрическое поле, и возможность выполнения из пьезокерамики изделий сложной формы позволили создать конструкции пьезоэлектрических акселерометров, в значительной мере свободных от указанных недостатков. Оказалось возможным в ряде случаев за-
Глава 13. Датчики вибраций
Рис. 13.20. Классификация пьезоэлектрических акселерометров
менить многоэлементные конструкции одним монолитным пьезокерамическим блоком, различные области которого выполняют функции основных рабочих элементов акселерометра — основания, пьезоактивного элемента, инерционной массы.
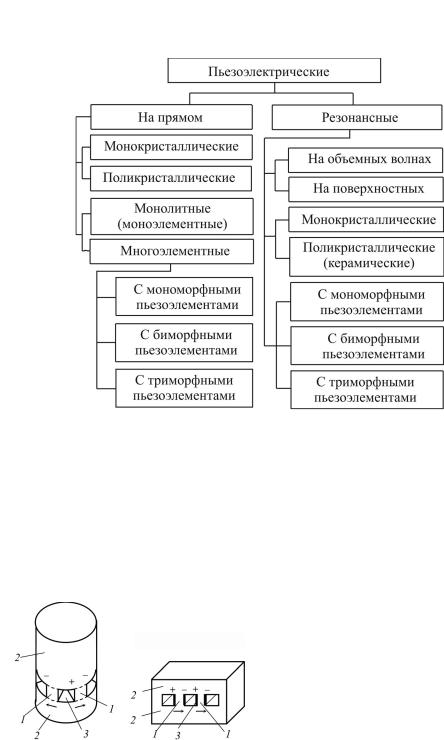
В [2, 3] описаны две конструкции монолитных акселерометров — прямоугольной и цилиндрической формы (рис. 13.21).
Эти акселерометры состоят из поляризованных областей, находящихся между электродами, нанесенными на внутреннюю поверхность отверстий в монокерамическом блоке. Инерционной массой является неполяризованная часть блока, находящаяся над по-
|
ляризованной частью. |
|
|
Достоинствами их является про- |
|
|
стота конструкции, высокая резонанс- |
|
|
ная частота, а недостатком — значи- |
|
|
тельная боковая чувствительность. |
|
|
В [23] описана конструкция моно- |
|
|
литного цилиндрического акселеро- |
|
Рис. 13.21. Монолитные акселерометры: |
метра без конических отверстий, а |
|
электроды расположены на цилиндри- |
||
1 — поляризованная часть; 2 — неполя- |
||
ризованная часть; 3 — электроды |
ческой поверхности (рис. 13.22). |

13.10. Пьезоэлектрические акселерометры
Рис. 13.22. Монолитный акселерометр: 1 — поляризованная зона; 2 — неполяризованная зона — инерционная масса; 3 — неполяризованная зона — основание; 4, 5 — электроды
Такая конструкция не только проще, но и позволяет изменять чувствительность акселерометра за счет ширины электродов.
Монолитные акселерометры, изображенные на рис. 13.21, 13.22, обладают существенной поперечной чувствительностью из-за несимметричности их конструкции. В последнем случае — это несимметричность расположения электродов, а, следовательно, и поляризованных зон акселерометра.
Многоэлементные акселерометры
Как отмечалось выше, акселерометры, в конструкции которых имеются один или несколько пьезоэлементов, одна или несколько инерционных масс, упругие элементы, основание (корпус) и т.п., могут быть названы многоэлементными. В некоторых случаях пьезоэлемент жестко соединяют с инерционной массой и основанием с помощью клея, припоя или винтов [23].
Механическая модель многоэлементного пьезоэлектрического акселерометра приведена в работах [7, 10, 20, 23].
При этом частота собственных колебаний акселерометра, т.е. его резонансная частота:
|
à |
|
k |
|
|
|
||
|
|
|
|
|||||
|
|
|
|
|
|
|||
или |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
2 |
k |
|
|
, |
(13.13) |
|||
|
|
|
||||||
a |
|
|
|
|
|
m0 |
|
|
|
mm |
|
|
|
|
|||
где k — эквивалентная жесткость пьезоэлемента; mm и m0 — массы инерционной массы и основания.
При идеально жестком закреплении акселерометра на объекте можно полагать, что масса основания возрастает. Отсюда следует весьма важный для практики вывод: резонансная частота закрепленного на объекте акселерометра
уменьшается.
Если масса объекта достаточно велика, то можно считать, что m0 >> mm. Тогда:
2a |
k |
. |
(13.14) |
|
|||
|
mm |
|
|
Из этого следует вывод, что на практике необходимо стремиться к тому,
чтобы масса акселерометра mm была намного меньше массы объекта m0, на котором акселерометр закрепляется.