

литература / Sharapov_V._Datchiki
.pdfГлава 12. Датчики и приборы для измерения механических величин
отсюда
> x |
E( x |
y )(1 2 ); |
(12.8) |
> y |
E( y |
x )(1 2 ), |
|
а при линейном напряженном состоянии |
|
||
|
> x |
E x , |
(12.9) |
Методы и преобразователи механических напряжений описаны, например, в [1—6, 9, 14].
Литература
1.Анисимов В.А., Каторгин Б.И., Куценко А.Н., Малахов В.П., Рудаков А.С., Чванов В.К. Диагностика механических напряжений на основе акустоупругого эффекта. — Одесса, «Optimum», 2003, 196 с.
2.Анисимов В.А., Каторгин Б.И., Куценко А.Н., Малахов В.П., Рудаков А.С., Чванов В.К. Акустическая тензометрия. Изд. 2. В кн. «Неразрушающий контроль»: Справочник. В 8 т. Т. 4. Стр. 3—228. М.: Машиностроение, 2006.
3.А.с. 532786 СССР. Способ измерения модуля упругости материала / Шарапов В.М., Максак В.М. 1976.
4.Бобренко В.М., Куценко А.Н., Малахов В.П. Акустический контроль механических напряжений. — О.: Astroprint, 1997. 272 c.
5.Демкин Н.Б. Контактирование шероховатых поверхностей. — М.: Наука, 1970. — 227 с.
6.Клюев В.В., Соснин Ф.Р., Филинов В.Н. и др. Неразрушающий контроль и диагностика. — М.: Машиностроение, 1995. 488 с.
7.Левшина Е.С., Новицкий П.В. Электрические измерения физических величин: (Измерительные преобразователи). — Л.: Энергоатомиздат, 1983. — 320 с.
8.Малов В.В. Пьезорезонансные датчики. — М.: Энергоиздат, 1989. — 272 с.
9.Минаев И.Г., Шарапов В.М. Об одном способе измерения контактной жесткости // Изв. вузов СССР. Сер.: «Машиностроение». 1976. № 7.
10.Политехнический словарь. Гл. ред. И.И. Артоболевский. — М.: Советская энциклопедия, 1976. — 608 с.
11.Полищук Е.С. Измерительные преобразователи. — Киев: Вища школа. 1981. — 296 с.
12.Полищук Е.С., Дорожовец М.М., Стадник Б.И., Ивахив О.В., Бойко Т.Г., Ковальчик А. Средства и методы измерений неэлектрической величины: Учебник / Под ред. проф. Е.С. Полищука. — Бескид-Біт, 2008. — 618 с. (на укр. яз.).
13.Проектирование датчиков механических величин / Под ред.. Е.П. Осадчого. — М.: Машиностроение, 1976. — 328 с.
14.Рыжов Э.В. Контактная жесткость деталей машин. — М.: Наука, 1970. — 227 с.
15.Фрайден Дж. Современные датчики: Справочник. — М.: Техносфера, 2005. — 592 с.
16.Шарапов В.М., Мусиенко М.П., Шарапова Е.В. Пьезоэлектрические датчики / Под ред. В.М.Шарапова. — Москва: Техносфера, 2006. — 632 с.
17.Schaumburg H. Sensoren. Band 3. B.G. Teubner Stuttgart: 1992.
18.Schaumburg H. (Hrsg.) Sensoranwendungen. Band 8. B.G. Teubner Stuttgart: 1995.
19.Jorg Hoffman. Tashenbuch der Messtechnic. Leipzig: Fachbuchverlag: 2000.
20.Jan Zakrzewski. Czujniki i przetworniki pomiarowe. Podrкcznik problemowe. Gliwice. 2004.
21.www.chipinfo.ru/chipnews/199909/24.html.

Глава 13. Датчики вибраций
колебаний. Для подавления же собственных колебаний вводят различного рода сопротивления — успокоители, которые приводят к интенсивному их затуханию [7, 11].
В вибрографах широко применяются и другие типы маятников, а также подвесов с винтовыми и плоскими пружинами [7].
Вибраторы светолучевых осциллографов
К числу вторичных преобразователей вибраций следует отнести также вибраторы (шлейфы) магнитоэлектрических осциллографов [7]. Вибраторные осциллографы являются устройствами, позволяющими записывать многие колебательные процессы и явления. Для этого исследуемый механический процесс с помощью датчика превращают в электрические колебания тока или напряжения. Полученные электрические колебания подают на вибратор, зеркальце которого, отражая падающий от осветителя луч, записывает на фоточувствительной ленте кривую, соответствующую исследуемому процессу. Вибраторы осциллографов бывают двух типов — петлевые и рамочные [7].
На рис. 13.4, а показана схема петлевого вибратора. Между полюсами постоянного магнита натянута в виде петли тонкая ленточка 1 из немагнитного металла, чаще всего из бронзы. Петля опирается на две изолирующие призмочки 2 (опорные порожки), в центре ее наклеено маленькое зеркало 3.
|
|
Таким образом, рабочая часть петли |
|
|
|
состоит из двух параллельных ленточек, по |
|
|
|
одной из которых ток течет в одном на- |
|
а) |
б) |
правлении, а по другой — в противопо- |
|
ложном. Петля перекинута через ролик 4 и |
|||
Рис. 13.4. Схемы |
подвижных сис- |
||
натянута пружиной 5. Все устройство по- |
|||
тем вибраторов |
магнитоэлектриче- |
мещено в корпус, залитый маслом. При |
|
ских осцилографов |
|||
протекании тока по петле ее ветви в ре- |
|||
|
|
||
зультате взаимодействия тока и магнитного поля переместятся в разные стороны, и зеркальце повернется на угол, пропорциональный току.
Петлевые вибраторы изготовляются с собственными частотами от 600 до 20 000 Гц. Вибраторы этого типа установлены в широко распространенном ранее осциллографе МПО-2.
На рис. 13.4, б представлена схема рамочного вибратора со сплошной растяжкой. Здесь на ленточной растяжке 1, выполненной из бронзы или другого немагнитного металла, наклеивается узкая рамка 4 из нескольких витков тонкой медной эмалированной проволоки. Здесь же укрепляется зеркальце 3.
Исследуемый ток, протекая по рамке, взаимодействует с магнитным полем и заставляет рамку с зеркальцем поворачиваться в соответствии с величиной тока.
В современных виброизмерительных приборах сигнал датчика обрабатывается и визуализируется в компьютере.

13.3. Индукционные датчики
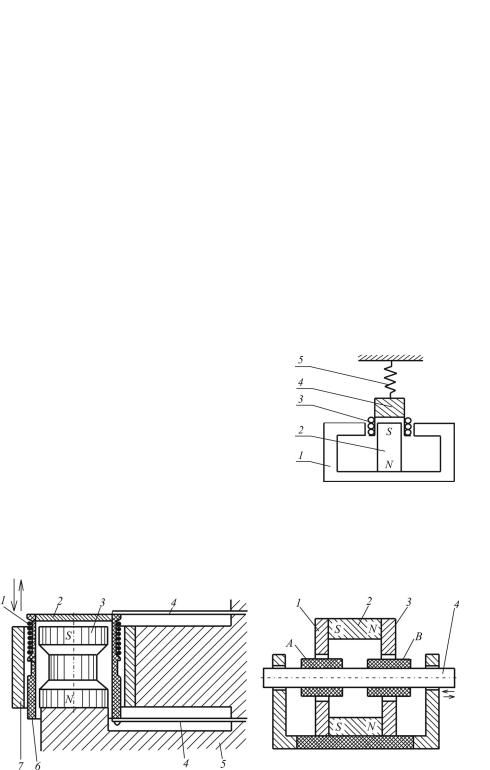
На рис. 13.8 показана схема индукци- |
|
онного датчика с неподвижной катушкой |
|
[7]. Якорь 1, перемещаясь, изменяет вели- |
|
чину воздушного зазора и, следовательно, |
|
магнитного потока, созданного постоян- |
|
ным магнитом 4 и проходящего через сер- |
|
дечник 3 катушки 2. |
|
Благодаря большому числу витков ка- |
|
тушки э.д.с., наводимая в ней, достигает |
|
значительных величин (до нескольких |
Рис. 13.8. Индукционный датчик с |
единиц и даже десятков вольт). В конст- |
неподвижной катушкой |
рукции датчика предусмотрен шунтирую- |
|
щий магнитопровод 5. Это сделано для того, чтобы при перемещении якоря датчика не нужно было преодолевать сил магнитного притяжения.
Индукционные датчики вращательного движения служат для измерения угловых скоростей и ускорений.
На рис. 13.9, а показана схема индукционного датчика вращательного движения с вращающейся катушкой 2, которая механически связана с испытуемым объектом через вал 1 и перемещается относительно магнита 3. Такие датчики представляют собой небольшой генератор и делятся на датчики постоянного тока, имеющие коллектор, и датчики переменного тока, имеющие контактные кольца. Э.д.с., наводимая в обмотке этих датчиков, пропорциональна скорости вращения якоря с обмоткой с точностью до 1—3%. Эти датчики обычно работают при скоростях вращения якоря до 5000—10000 об/мин.
При более высоких скоростях использование этих датчиков затруднительно, так как центробежные силы создают в обмотке большие растягивающие усилия. Также затруднительно измерение очень малых скоростей из-за ненадежности работы скользящих контактов при низких напряжениях.
В этом отношении применение датчиков с вращающимся магнитом 1 и неподвижными катушками 2 (рис. 13.9, б) следует считать более выгодным,
а) |
б) |
в) |
г) |
Рис. 13.9. Принцип устройства индукционных датчиков вращательного движения: а — постоянного тока с вращающейся катушкой; б — переменного тока с вращающимся магнитом; в — переменного тока с вращающимся кольцом; г — переменного тока с подвижным якорем

Глава 13. Датчики вибраций
так как, придавая полюсным наконечникам специальную форму, можно получить в обмотках катушек э.д.с, изменяющуюся не по синусоидальному закону, а, например, по пилообразному закону. С помощью таких датчиков можно измерять очень большие скорости (до десятков тысяч оборотов в минуту), так как вращающийся магнит может быть полностью уравновешен.
Вдатчике, показанном на рис. 13.9, в, в зазоре между полюсами неподвижного магнита 3 и катушкой 2 вращается кольцо 1 (в датчике, показанном на рис. 13.9, г, внутри катушки 2, между полюсами постоянного магнита вращается якорь 1), которое связано механически с испытуемым валом. Кольцо или якорь изготавливают из ферромагнитного материала, изменяющего при своем движении магнитное сопротивление, а следовательно, и поток, сцепляющийся с витками катушки.
Вдатчиках, показанных на рис. 13.9, а, б, магнитный поток не изменяется,
ирасчет магнитной цепи и э.д.с. датчика производят, используя обычные приемы расчета постоянных магнитов.
Вдатчиках же, показанных на рис. 13.9, в, г, необходимо учитывать переменную составляющую магнитного потока, обусловленную изменением во времени магнитного сопротивления потоку, а также влияние поверхностного эффекта на распределение переменной составляющей магнитного потока.
13.4. Индуктивные датчики
Индуктивные электромагнитные датчики находят широкое применение для измерения малых и больших перемещений. Основной принцип работы индуктивных датчиков состоит в изменении сопротивления магнитопровода, осуществляемого или изменением величины воздушного зазора магнитной цепи, или магнитной проницаемости железного сердечника, входящего в магнитную цепь. Индуктивные датчики бывают с переменным воздушным зазором, с подвижным железным сердечником, магнитоупругие (или магнитострикционные) и основанные на вихревых токах (см. гл. 10).
Индуктивность электромагнитной системы, содержащей обмотку и ферромагнитный сердечник с небольшим воздушным зазором, определяется формулой
L |
w2 |
(13.2) |
, |
Z м
где w — число витков; Zм — магнитное сопротивление сердечника и зазора. Как известно,
|
|
Z м |
Rж R 2 X м2 |
, |
(13.3) |
|
где Rж |
l |
— активное магнитное сопротивление сердечника; l и sж |
— дли- |
|||
|
||||||
sж |
||||||
|
|
|
|
|
||
на и площадь поперечного сечения сердечника; — магнитная проницаемость
сердечника; R — магнитное сопротивление воздушного зазора; — ве-
в sв



Глава 13. Датчики вибраций
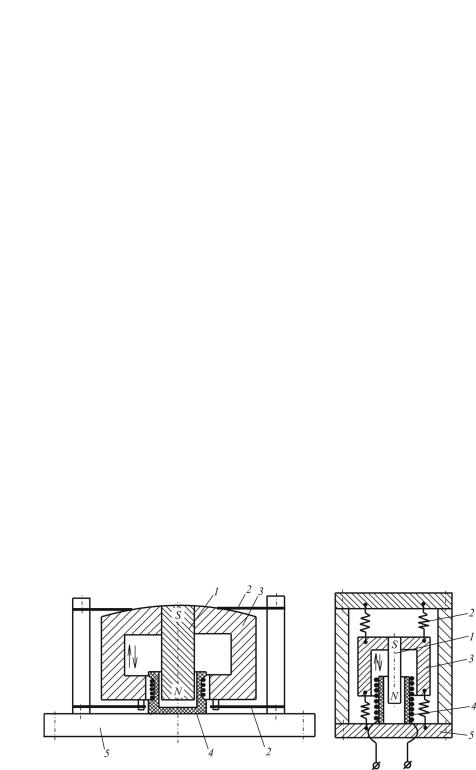
а) |
б) |
в) |
г) |
д) |
е) |
Рис. 13.11. Типы дифференциальных индуктивных датчиков
На рис. 13.11, а, б представлены наиболее распространенные схемы простых дифференциальных датчиков перемещения.
Схема, показанная на рис. 13.11, в, служит для измерения малых угловых перемещений, а на рис. 13.11, г — для измерений малых перемещении вращающегося вала. На рис. 13.11, д показана схема дифференциального датчика перемещения цилиндрического типа. На рис. 13.11, е изображена схема дифференциального датчика с изменяющейся площадью зазора.
Датчики с подвижным сердечником
Для измерения больших перемещений, порядка нескольких сантиметров, применяют соленоидные датчики (рис. 13.12, а), состоящие из открытого соленоида и подвижного якоря. При вхождении якоря внутрь катушки индуктивность последней изменяется приблизительно пропорционально введенной в катушку массе якоря, т.е.
L |
w2 |
D )l , |
(13.8) |
|
|
(D |
|||
|
||||
|
2 |
1 |
|
|
|
lк |
|
|
|
где w, lк, D2 D1 — число витков, длина и разность диаметров поперечного сечения катушки в сантиметрах; l — величина вхождения якоря в сантиметрах;— магнитная проницаемость материала якоря.
На рис. 13.12, б показан дифференциальный индуктивный датчик соленоидного типа. В таких датчиках входное перемещение якоря составляет до 50—60 мм.
На рис. 13.12, в приведена схема трансформаторного дифференциального датчика, состоящего из трех катушек: двух катушек А, питаемых переменным током, и катушки Б, к которой присоединяется измерительный прибор. При отсутствии вибрации якорь находится в нейтральном положении, и в цепи измерительной катушки тока нет. При смещении якоря в любую сторону и нарушении симметрии в этой цепи появляется ток с частотой питающего напряжения. Если якорь является сейсмической массой, то при ее вибрации относительно катушек в цепи измерительной катушки возникают модулированные колебания, как и в схеме вибродатчика трансформаторного типа. В случае не-

13.5. Тензометрические датчики
а) |
б) |
в) |
г) |
д) |
Рис. 13.12. Типы индуктивных датчиков с подвижным ферромагнитным сердечником
обходимости катушки А и Б можно поменять местами: питание можно подавать в катушку Б, а суммарное напряжение измерять на катушках А [7].
Для измерения больших перемещений применяется соленоидный датчик, состоящий из относительно короткой катушки и профильного якоря большой длины (рис. 13.12, г). В конструкциях этих датчиков можно путем изготовления якоря сложной формы получить линейную зависимость [7].
На рис. 13.12, д изображена схема индуктивного датчика с профилированным плоским кулачком, который играет роль якоря и может поворачиваться на угол = 0 Χ 360°. При этом возможно получение любого вида зависимости
L f ( ).
13.5.Тензометрические датчики
Кдостоинствам тензометрических измерительных преобразователей (ИП) относится широкий амплитудный диапазон измерений и сравнительно низкое выходное сопротивление, что способствует подавлению электромагнитных наводок. Однако в силу небольшой мощности полезного сигнала создание высокочастотных тензометрических ИП параметров движения встречает большие трудности. Поэтому их рабочий диапазон частот редко превышает 10 кГц [7].
На рис. 13.13 представлена конструкция тензометрического вибродатчика с четырьмя тензорезисторами. В корпусе 1 установлены два стакана 4 и 6, стенки которых образуют упругие элементы; на них наклеены тензорезисторы. Донышки стаканов, втулка 12 и винт 7 с гайкой 13 образуют инерционное тело. Выводы 11 тензорезисторов соединены с жилами 10 кабелей пайкой. Места пайки залиты мастикой 9 и защищены изолирующей прокладкой 8.