

литература / Sharapov_V._Datchiki
.pdfГлава 10. Электромагнитные преобразователи
ния воздушного промежутка, эквивалентная индуктивность намагничивающей обмотки
Lэкв |
w2 |
|
0 |
S |
M |
, |
(10.1) |
|
|
|
|
||||
а полное электрическое сопротивление: |
|
|
|
|
|
|
|
Z Rэкв j Lэкв , |
(10.2) |
||||||
где Rэкв — эквивалентное активное сопротивление намагничивающей обмотки. Следовательно, функция преобразования индуктивного преобразователя с переменной длиной воздушного промежутка Z = f( ) или Lэкв = F( ) нелинейная. Характер изменения Z = f( ) зависит от частоты намагничивающего тока. При низких частотах, когда индуктивное сопротивление Lэкв становится близким или даже меньшим по сравнению с активным сопротивлением Rэкв обмотки, относительное изменение полного электрического сопротивления
при прочих равных условиях уменьшается (рис. 10.2, в).
Индуктивный преобразователь с переменной длиной воздушного промежутка можно считать практически линейным преобразователем лишь при малых относительных изменениях длины этого промежутка / . В реальных конструкциях таких преобразователей при / = 0,1...0,15 относительное изменение индуктивности не превышает 0,05...0,1 при нелинейности функции преобразования 1...3%. Поэтому такие преобразователи применяют для преобразования малых перемещений (0,01...10) мм.
Значительного улучшения линейности с одновременным увеличением чувствительности можно достичь, создавая дифференциальные преобразователи. Дифференциальный индуктивный преобразователь (рис. 10.3, а) имеет два идентичных преобразовательных элемента, конструктивно объединенных таким образом, что при перемещении подвижного сердечника воздушный промежуток между сердечником и полюсами одного из преобразовательных элементов увеличивается, а между сердечником и полюсами другого преобразовательного элемента на-
а) |
б) |
Рис. 10.3. Дифференциальный индуктивный преобразователь и его функция преобразования

10.2. Индуктивные преобразователи
столько же уменьшается. Дифференциальное включение элементов такого преобразователя дает возможность значительно расширить линейный участок функции преобразования и увеличить чувствительность (рис. 10.3, б). Относительное изменение дифференциальных преобразователей, в пределах которого нелинейность функции преобразования не превышает 1%, достигает 0,3...0,4. Поэтому на практике обычно применяются дифференциальные преобразователи.
Преобразователи плунжерного типа. Индуктивные преобразователи этого типа с разомкнутой магнитной цепью (рис. 10.4, а) применяют для преобразования перемещений от 10 до 100 мм. В основу принципа действия таких преобразователей положено изменение магнитного сопротивления цепи магнитного потока, создаваемого намагничивающими обмотками во время перемещения плунжера (сердечника). Индуктивный преобразователь этого типа состоит из неподвижной катушки 1 и ферромагнитного стержня (плунжера) 2. Индуктивность катушки является функцией глубины перемещения плунжера внутрь катушки. Точное выражение функции преобразования такого преобразователя получить трудно. Однако, пренебрегая неравномерностью распределения поля внутри катушки ограниченной длины, можно получить приближенную зависимость изменения индуктивности в функции перемещения на основе таких рассуждений: индуктивность катушки без сердечника с w витками радиусом R и длиной l стабильна, а индуктивность при наличии ферромагнитного плунжера (сердечника) диаметром 2RCT, который находится внутри катушки на длине , растет в результате увеличения общего магнитного потока и будет равняться
|
|
|
|
|
|
|
|
|
L 0 |
2<R2 w2 |
|
; |
|
|
|
(10.3) |
||||
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
2 |
< 2 |
w |
2 |
|
|
|
2 |
<R2 |
w2 , |
|
||
|
|
|
|
|
L 0 |
+ |
R |
|
( еф |
1) |
|
|
СТ |
|
., |
(10.4) |
||||
|
|
|
|
|
|
l |
|
|
|
|
l |
|
||||||||
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
l . |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
где еф |
|
0 |
ф |
|
— эквивалентная магнитная проницаемость магнит- |
|||||||||||||||
|
|
|
|
|
||||||||||||||||
|
|
|
lП |
|
||||||||||||||||
|
0 |
|
|
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
lСУМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ной цепи (здесь 0 и ф магнитные проницаемости воздуха и ферромагнетика, lсум и lП — соответственно суммарная длина магнитопровода и ее часть через воздух).
а) |
б) |
Рис. 10.4. Индуктивные преобразователи плунжерного типа

Глава 10. Электромагнитные преобразователи
Преобразователи этого типа в связи с тем, что магнитный поток замыкается в основном через воздух, имеют значительно меньшую чувствительность, чем преобразователи с переменным воздушным промежутком. Кроме того, они чувствительны к влиянию внешнего магнитного поля и нуждаются в экранировании. Эти недостатки можно устранить, если катушки разместить на ферромагнитном сердечнике.
Измерительные цепи. Самыми распространенными измерительными цепями индуктивных преобразователей являются мостовые цепи, где два плеча моста составляют полные сопротивления секций дифференциального преобразо-
вателя Z1 = Rекв + j L1 и Z2 = Rекв+ j L2, а два другие плеча моста — активные сопротивления R3 = R4 = R (рис. 10.4, б).
Такие мосты обычно спроектированы так, что при отсутствии входного воздействия (значение измеряемого перемещения равняется нулю) якорь дифференциального преобразователя находится в среднем положении, а исходное напряжение моста UВЫХ = 0. При этом Z1 = Z2 = Z0. При перемещении якоря в результате появления входного действия сопротивления секций будут равняться соответственно Z1 = Z0 + Z1 и Z2 = Z0 Z2. Изменения сопротивленийZ1 = jw L1 и Z = jw L2 в общем случае немного отличаются от нелинейности функции преобразования. Однако, если перемещения якоря относительно среднего положения малые, с достаточной для практики точностью эти изменения можно считать одинаковыми, то есть Z1 = Z2 = Z.
Эти изменения сопротивлений секций дифференциального преобразователя обычно небольшие, и можно считать, что напряжение в измерительной диагонали моста изменяется пропорционально Z/Z и составляет
U ВЫХ |
|
|
|
2URZ 0 RН |
|
|
Z / Z , |
(10.5) |
|||
(R Z 0)[2Z 0 R |
RН (R Z 0)] |
||||||||||
|
|
|
|
||||||||
а в режиме холостого хода, когда RН ; |
|
|
|
|
|
||||||
|
|
U ВЫХ |
|
|
2URZ 0 |
Z / Z. |
|
(10.6) |
|||
|
|
|
(R Z 0)2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|||
10.3. Взаимоиндуктивные преобразователи
Взаимоиндуктивными (трансформаторными) называют электромагнитные преобразователи, которые имеют первичную намагничивающую обмотку и вторичную измерительную обмотку, взаимная индуктивность между которыми может изменяться под действием входной (измеряемой) величины. Известны два вида взаимоиндуктивных преобразователей: с переменным магнитным сопротивлением и неподвижной обмоткой и с неизменным магнитным сопротивлением и подвижной обмоткой.
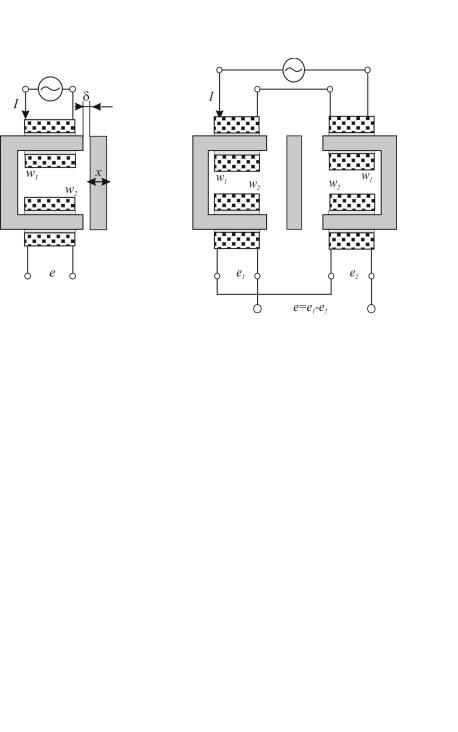
В обычных (одинарных) взаимоиндуктивных преобразователях с переменным воздушным промежутком (рис. 10.5, а) ЭДС, которая наводится во вторичной обмотке
10.3. Взаимоиндуктивные преобразователи
а) |
б) |
Рис. 10.5. Взаимоиндуктивные преобразователи с переменным воздушным зазором
6e6 |
dΟ |
w2 |
d |
w2 |
d FM |
|
w1I w2 |
, |
(10.7) |
||||
|
|
|
|
|
|
|
|
||||||
|
|
dt Z M |
|
|
|
||||||||
|
dt |
dt |
|
RM |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
0 S |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где w1 и w2 — количество витков намагничивающей и измерительной обмоток; I — намагничивающий ток; и S — длина и площадь воздушного промежутка.
Зависимость е = f(d) таких взаимоиндуктивных преобразователей является нелинейной. Кроме того, на выходе измерительной обмотки действует ЭДС при отсутствии входного действия, значение которого отвечает начальному зазору. Поэтому взаимоиндуктивные преобразователи с переменным воздушным зазором выполняются в большинстве случаев дифференциальными, что дает возможность при отсутствии входного действия иметь нулевой исходный сигнал, увеличить чувствительность и линейность функции преобразования. Действительно, при встречном включении вторичных обмоток дифференциального преобразователя (рис. 10.5, б) результирующая ЭДС.
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
e e |
1 |
e |
2 |
w |
w |
2 |
I |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
Z M2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Z M1 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10.8) |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 w1w2 I |
|||
w1w2 I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||||||
|
|
|
0 |
|
RM |
|
0 |
|
0 S(RM R )2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
RM |
|
|
0 S |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 S |
|
|
|
|||||
Для обеспечения неизменности суммарного сопротивления цепи намагничивающих обмоток дифференциального преобразователя обмотки w1 обоих преобразовательных элементов включены последовательно. Уменьшение со-
Глава 10. Электромагнитные преобразователи
противления одной из обмоток, вызванное перемещением подвижной сердечника, компенсируется увеличением сопротивления второй обмотки.
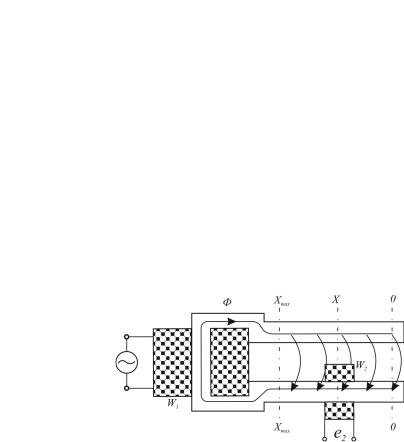
Для преобразования больших линейных перемещений (до 1 м и больше) применяют преобразователи с распределенными магнитными параметрами и подвижной рамкой (рис. 10.6). Преобразователь состоит из магнитопровода с рабочей частью в виде двух параллельных полос, намагничивающей обмотки w1 и измерительной обмотки w2. При перемещении обмотки w2 из крайнего левого положения в крайнее правое индуктируемая в ней ЭДС уменьшается практически по линейному закону, если магнитное сопротивление магнитопровода малое по сравнению с магнитным сопротивлением воздушного промежутка. Преобразователи такого типа сравнительно легко выполнить с заданной функциональной зависимостью между индуктируемой ЭДС и преобразуемым перемещением, применив для этого профилированный магнитопровод.
Рис. 10.6. Взаимоиндуктивный преобразователь с распределенной магнитной проводимостью
Для преобразователя, схема которого изображена на рис. 10.6, приближенное значение магнитного потока Ф, который создается магнитодвижущей силой F (если пренебречь магнитным сопротивлением магнитопровода)
Ф = FG = I1 w1 q хmax, |
(10.9) |
где w1 — количество витков намагничивающей обмотки; I1 — намагничивающий ток; q = G/хmax — удельная магнитная проводимость, G — полная магнитная проводимость воздушного промежутка между стержнями.
Магнитный поток, замыкающийся через сечение х — х,
ФX = Fqх = I1w1qх, |
(10.10) |
а ЭДС, которая наводится во вторичной обмотке с количеством витков w2,
е2 = w1w2I1 qх. |
(10.11) |
Во взаимоиндуктивных преобразователях угловых перемещений измерительная обмотка выполняется в виде рамки, которая может вращаться в воздушном промежутке магнитного поля. При наличии тока в намагничивающей обмотке ЭДС измерительной обмотки будет зависеть от угла поворота рамки [3, 7, 9, 10].

10.4. Индукционные преобразователи
10.4. Индукционные преобразователи
Принцип действия индукционных преобразователей основан на использовании явления электромагнитной индукции. Известны две главных группы индукционных преобразователей [9, 10]. К первой принадлежат преобразователи, в которых изменение магнитного потока, который сцепляется с витками катушки, осуществляется перемещением последней в магнитном поле постоянного магнита или перемещением постоянного магнита относительно неподвижной катушки. Это, в сущности, генераторы ЭДС, значение которой пропорционально скорости линейных или угловых перемещений соответственно катушки в постоянном магнитном поле или скорости перемещения магнитного поля относительно витков неподвижной катушки.
Во вторую группу входят преобразователи, в которых магнитный поток, который сцепляется с витками катушки, изменяется с помощью изменения магнитного сопротивления магнитной цепи, например, в результате изменения расположения подвижного ферромагнитного элемента.
В преобразователях первой группы ЭДС, которая наводится в измерительной обмотке, равна
e Bl |
dx |
или e BS |
d |
, |
(10.12) |
dt |
|
||||
|
|
dt |
|
||
где B — индукция в рабочем промежутке, l = <Dw — активная длина измери-
тельной обмотки (рамки); S |
<D 2 |
w — активная площадь рамки; D — сред- |
|
|
4 |
ний диаметр обмотки; x и — соответственно линейное и угловое перемещение, w — количество витков.
В преобразователях с переменным магнитным сопротивлением
|
dФ |
|
d |
|
F |
M |
|
|
wF |
M |
|
dR |
M |
|
|
e w |
w |
|
|
|
|
|
|
|
, |
(10.13) |
|||||
|
|
|
|
|
|
|
|
|
|||||||
|
dt |
|
|
|
|
|
|
|
RM2 |
|
dt |
|
|||
|
|
dt |
RM |
|
|
|
|||||||||
где FM — магнитодвижущая сила, RM — магнитное сопротивление.
Если для преобразователя линейных перемещений RM = RMO + kRMOx (здесь RMO — магнитное сопротивление магнитопровода при х = 0; k — постоянный коэффициент, который определяется конструктивными параметрами преобразователя), то при RM = kRMOx Ѕ RMO уравнение преобразования такого преобразователя примет вид
e |
kwFM |
|
dx |
. |
(10.14) |
RMO |
|
dt |
|||
|
|
|
|
Если подвижному сердечнику преобразователя угловой скорости придать такую форму, чтобы во время его вращения суммарный воздушный промежуток между полюсами магнитопровода изменялся по синусоидному закону (дважды за один оборот), то в первом приближении магнитное сопротивление магнитной цепи и магнитный поток будут также изменяться по синусоидному закону
Ф(t) |
Фmax Фmin |
|
Фmax Фmin |
sin2 t, |
(10.15) |
|
|
||||
2 |
2 |
|
|
||

Глава 10. Электромагнитные преобразователи
а ЭДС, которая наводится в измерительной обмотке,
e w |
dФ(t) |
w (Фmax Фmin )cos2 t, |
(10.16) |
|
|||
|
dt |
|
|
где Фmax и Фmin — максимальное и минимальное значение магнитного потока. Основными разновидностями индукционных преобразователей являются преобразователи (датчики) скорости линейных перемещений, вибраций, пре-
образователи частоты вращения и преобразователи расходов жидкостей. Преобразователи частоты вращения могут быть основаны на принципе из-
менения потокосцепления, который осуществляется вращением рамки в магнитном поле постоянного магнита с заданной индукцией.
Устройство датчика виброметра показано на рис. 10.7.
Рис. 10.7. Индукционный вибропреобразователь
Подвижной частью такого датчика является инерционная масса в виде постоянного магнита 1 и полюсных наконечников 2, которая может осуществлять под действием силы инерции поступательное движение в направлении оси х-х. Упругое противодействие этому движению создается цилиндрическими пружинами 3, а успокоение — с помощью медного каркаса 5 в результате наведения в нем токов при перемещении постоянного магнита. Измерительная обмотка 4 состоит из двух половинок, намотана на медный каркас и закреплена стальной обоймой 6, которая служит одновременно корпусом. Если исследуемый объект осуществляет колебательное движение по закону
х = Хmax sin t, |
(10.17) |
то ЭДС, которая наводится в измерительной обмотке,
e BwLcp |
dx |
X max BwLcp cos t, |
(10.18) |
|
|||
|
dt |
|
|
где B — индукция в воздушном промежутке, w и Lср — количество витков и средняя длина витка.
Поскольку ЭДС пропорциональна скорости перемещения, то есть dx/dt, то для получения сигналов, пропорциональных виброперемещениям или виброускорениям, исходный сигнал индукционного датчика подается на вторичный

10.5. Магнитоупругие и магнитоанизотропные преобразователи
преобразователь, которым является соответственно интегрирующий или дифференцирующий преобразователь.
Обычно индукционные датчики используют для преобразования параметров вибраций частотой от 1 до 50 Гц при амплитуде вибраций 1...5 мм. Их чувствительность достигает 150 В/(м/с).
Рис. 10.8 иллюстрирует принцип действия так называемого импульсного индукционного датчика тахометра, основанного на изменении магнитного сопротивления цепи. Датчик имеет измерительную обмотку 1, размещенную на стальном стержне 2, через который замыкается магнитный поток постоянного магнита 3. Подвижной частью является ферромагнитный зубчатый диск 5, который крепится к валу, обороты которого измеряют.
Рис. 10.8. К принципу действия индукционного таходатчика
При вращении вала зубчатые выступы 4 диска (индуктора) уменьшают воздушный промежуток между подвижным ферромагнитным диском и неподвижными частями магнитопровода. Это приводит к изменению магнитного потока и наведению в измерительной обмотке ЭДС, пропорциональной скорости изменения магнитного сопротивления. ЭДС имеет вид двуполярных импульсов, частота которых:
fpn, 60
где p — количество выступов индуктора; n — частота его вращения, об/мин.
10.5.Магнитоупругие и магнитоанизотропные преобразователи
Принцип действия магнитоупругого преобразователя базируется на использовании магнитоупругого эффекта, суть которого заключается в изменении магнитной проницаемости и других магнитных свойств ферромагнитного тела под действием механических упругих деформаций [10]. В качестве примера на рис. 10.9 приведены гистерезисные петли никеля и пермаллоя для разных механических напряжений в материале. У никеля с увеличением механического напряжения > наклон петли гистерезиса, а следовательно, и магнитная проницаемость уменьшаются. Отмечается и значительное уменьшение остаточной индукции. В пермаллое с увеличениям механического напряжения петля гис-

Глава 10. Электромагнитные преобразователи
а) |
б) |
Рис. 10.9. Гистерезисные петли: а — пермаллоя; б — никеля
терезиса приближается к прямоугольной, остаточная индукция и магнитная проницаемость сильно растут.
Явление магнитной упругости называют также обратным магнитострикционным эффектом. Существует и прямой магнитострикционный эффект, когда внешнее магнитное поле вызывает механическую деформацию ферромагнитного тела.
Основной характеристикой магнитного материала в данном случае является коэффициент магнитоупругой чувствительности, который (по аналогии с коэффициентом тензочувствительности) определяется как отношение относительного изменения магнитной проницаемости / к относительной деформации l/l ферромагнитного тела или к напряжению растяжения > [9, 10]:
k |
|
( H >) / H |
или k> |
|
( H >) / H |
|
/ H |
, |
(10.19) |
|
l / l |
E l / l |
> |
||||||||
|
|
|
|
|
|
|
где H и — магнитная проницаемость ферромагнетика в ненагруженном состоянии и при нагрузке к напряженности >; Е — модуль упругости материала.
Поскольку при преобразовании механических напряжений начальные параметры магнитоупругих преобразователей обычно компенсируются, то целесообразнее пользоваться понятиям магнитоупругой чувствительности, под которой понимают отношение абсолютного прироста магнитной проницаемости к относительной деформации или к напряжению >:
S |
|
( H >) |
, или S |
H |
> |
. |
(10.20) |
l / l |
|
> |
|||||
|
|
|
|
|
|
Названные выше характеристики магнитоупругой чувствительности не являются исчерпывающими. Наиболее полной характеристикой считают магнитоупругую чувствительность материала по магнитной энергии как отношение изменения удельной магнитной энергии к деформации:
S E |
|
EМАГН . |
(10.21) |
|
|
> |
|

10.5. Магнитоупругие и магнитоанизотропные преобразователи
Поскольку изменение удельной магнитной энергии
В>
EМАГН Н2 dВ, (10.22)
ВН
где Вн и В> — магнитные индукции ферромагнетика в ненагруженном состоянии и при нагрузке, то учитывая что В 0Н, будем иметь
S E |
H |
> 0 H 2 |
(10.23) |
|
|
> |
. |
||
|
|
2 |
|
|
Последняя зависимость учитывает не только абсолютные изменения магнитной проницаемости под действием механических напряжений, но и значения напряженности магнитного поля, при которой это изменение происходит. Для достижения высокой относительной мощности выходного сигнала необходимо применять магнитные материалы, магнитное насыщение которых достигается при возможно более высокой напряженности магнитного поля. Это железокремниевые сплавы, никель, некоторые ферриты.
Магнитоупругие преобразователи по принципу использования магнитоупругого эффекта могут быть индуктивными или взаимоиндуктивными. В первых изменение магнитной проницаемости вызывает в окончательном результате изменение индуктивности намагничивающей цепи, которая состоит из одной или нескольких соединенных последовательно обмоток, намотанных на рабочий стержень (стержень, который подвергается деформации) магнитопровода. Без учета потерь на вихревые токи и на гистерезис индуктивность намагничивающей цепи
L |
w2 |
w2 |
S M |
. |
(10.24) |
|
RM |
lM |
|||||
|
|
|
|
Прирост (изменение) индуктивности, вызванный действием на магнитную цепь растягивающей или сжимающей силы, будет равняться
dL |
5L d |
5L |
dS M |
|
5L |
dlM . |
(10.25) |
|
|
||||||
|
5 |
5SM |
|
5lM |
|
||
Переходя к конечным |
приростам в |
пределах упругой |
деформации |
||||
( l/l << 1) и учитывая, что изменение индуктивности определяется, главным образом, изменением магнитной проницаемости, получим выражение для абсолютного прироста индуктивности (уравнение преобразования) и относительной чувствительности в соответствии с деформацией и механическим напряжением:
|
L |
L |
|
Lk>> |
w2 |
S M k>>; |
|
|
|
(10.26) |
|||
|
|
lM |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
S |
L / L |
|
|
/ |
k ; S> |
|
L / L |
|
k |
k>. |
(10.27) |
||
|
lM / lM |
> |
|
||||||||||
|
lM / lM |
|
|
|
|
E |
|
||||||
Особым условием нормальной работы магнитоупругого преобразователя является отсутствие в материале магнитопровода воздушных промежутков, магнитное сопротивление которых настолько большое, что даже незначитель-