

литература / Sharapov_V._Datchiki
.pdfГлава 13. Датчики вибраций
а) |
|
|
|
б) |
|
Рис. 13.42. Трехкоординатный |
пьезоэлектричес- |
Рис. 13.43. Диаграмма направ- |
|||
кий акселерометр: а — конструкция акселеромет- |
ленности разработанного аксе- |
||||
ра, б |
— |
конструкция |
чувствительного элемента: |
лерометра |
|
1, 4, 7 |
— |
основание; |
2, 5, 8 |
— пьезоэлементы; |
|
3, 6, 9 |
— инерционные массы |
|
|
||
Литература
1.Аллавердиев А.М., Ахмедов Н.Б. Физика микроэлектронных приборов // МИЭТ. — М., 1984. — С. 29.
2.А.с. 361723 СССР, МКИ G01P15/08. Пьезоэлектрический акселерометр / Крамаров О.П. и др., 1975.
3.А.с. 472587 СССР, МКИ G01P15/08. Пьезоэлектрический акселерометр / Янчич В.В., Крамаров О.П., 1976.
4.А.с. 1357723 СССР, МКИ G01P15/08. Датчик вибраций / Расторгуев Д.Л. и др. Открытия. Изобретения. 1986. — № 12.
5.А.с. 487312 СССР, МКИ G01P15/08. Датчик вибраций / Расторгуев Д.Л. и др. Открытия. Изобретения. 1986. — № 12.
6.А.с. 634493 СССР, МКИ G01P15/08. Пьезоэлектрический виброизмерительный преобразователь / Цеханский К.Р., Макеев В.М. Открытия. Изобретения. 1978. — № 43.
7.Гевондян Т.А., Киселев Л.Т. Приборы для измерения и регистрации колебаний. — М.: Машгиз, 1962. — 467 с.
8.Голицын Б.Б. Избранные труды. Т. 2: Сейсмология. — М.: АН СССР, 1960.
9.Джагупов Р.Г., Ерофеев А.А., Пьезоэлектронные устройства вычислительной техники, систем контроля и управления: Справочник. — СПб.: Политехника, 1994.
10.Измерения параметров вибрации и удара / В.С. Шкаликов, В.С. Пеллинец (ред.), Е.Г. Исакович, Н.Я. Цыган. — М.: Изд. стандартов, 1980. — 280 с.
11.Иориш Ю.И. Виброметрия. — М.: Машгиз, 1963.
12.Кажис Р.Й. Ультразвуковые информационноизмерительные системы. — Вильнюс: Мокслас, 1986.
13.Кудряшов Э.А., Магер В.Е., Рафиков Ш.М. Пьезоэлементы для датчиков силы и давления // Приборы и системы управления, — 1989. — № 9.
14.Левшина Е.С., Новицкий П.В. Электрические измерения физических величин. Измерительные преобразователи. — Л.: Энергоатомиздат, 1983. — 320 с.
15.Нуберт Г.П. Измерительные преобразователи неэлектрических величин: Пер. с англ. — Л.: Энергия, 1970. — 360 с.

Литература
16.Полищук Е.С. Измерительные преобразователи. — Киев: Вища школа, 1981. — 296 с.
17.Приборы и системы для измерения вибрации, шума и удара: Справочник. В 2 кн. / Под ред. Клюева В.В. — М.: Машиностроение, 1978.
18. Проектирование датчиков для измерения механических величин / Под ред. Е.П. Осадчего. — М.: Машиностроение, 1979.
19.Шарапов В.М., Минаев И.Г., Бондаренко Ю.Ю. и др. Пьезоэлектрические преобразователи (Справочное пособие) // Под ред. В.М. Шарапова. — Черкассы: ЧГТУ, 2004. — 435 с.
20.Пьезоэлектрические акселерометры и предусилители / Справочник по теории и эксплуатации. — Дания, 1987.
21.Тимошенко С.П. Колебания в инженерном деле. — М.: ГИФМЛ, 1959.
22.Шарапов В.М., Мусиенко М.П., Шарапова Е.В. Пьезокерамические преобразователи физических величин. — Черкассы: ЧГТУ, 2005. — 631 с.
23.Шарапов В.М., Мусиенко М.П., Шарапова Е.В. Пьезоэлектрические датчики. — М.: Техносфера, 2006. — 632 с.
24.Электрические измерения неэлектрических величин / Под ред. Новицкого П.В. — Л.: Энергия, 1975. — 576 с.
25.www.bruel
26.www.kistler.com.
27.www.elpapiezo.ru.
28.www.niifi.ru.
29.www.clobaltest.ru.
30.www.compel.ru.
31.www.interpribor.ru.
32.www.sktbelpa.ru.
ГЛАВА 14
ГИДРОАКУСТИЧЕСКИЕ
ПРЕОБРАЗОВАТЕЛИ
14.1.Классификация и характеристики преобразователей
Традиционно преобразователи, которые применяются в гидроакустике, называют гидроакустическими преобразователями [4, 6—12].
Гидроакустический преобразователь (ГАП) — непременный элемент гидроакустической антенны — представляет собой колебательную систему, предназначенную для излучения и приема акустических сигналов в водной среде [12].
По назначению преобразователи делят на излучатели (электроакустические преобразователи), приемники (датчики) и обратимые преобразователи. По принципу преобразования энергии различают пьезоэлектрические, магнитострикционные, электродинамические, электромагнитные, электростатические преобразователи. Наиболее часто в последнее время применяются пьезоэлектрические и магнитострикционные преобразователи [6—12].
По структуре колебательной системы преобразователи делят на стержневые, пластинчатые, цилиндрические, сферические.
По конструктивному выполнению преобразователи подразделяют на силовые и компенсированные.
Для изготовления ГАП используют мономорфные и биморфные пьезоэлементы [6, 7, 12].
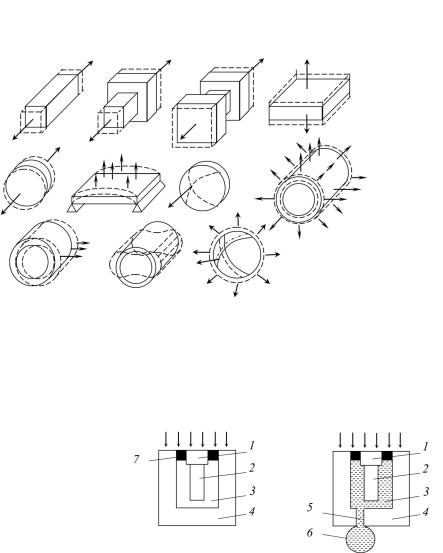
Стержневые системы содержат свободный электромеханически активный стержень (рис. 14.1, а) или стержень с одной (рис. 14.1, б), двумя (рис. 14.1, в) накладками или с некоторым числом слоев из пассивного материала. В таких системах возбуждаются продольные колебания по оси стержня с определенным распределением амплитуд и упругих напряжений, причем колебания считают поршневыми.
Пластинчатые системы выполняют в виде прямоугольной (рис. 14.1, г) или круглой (рис. 14.l, д) пластин, колеблющихся по толщине, а также в виде пластин, опертых по двум противоположным граням (рис. 14.1, е) или по окружности (рис. 14.1, ж) и совершающих поперечные колебания изгиба.
В цилиндрических системах, которые образуют кольца из активного материала, могут возбуждаться радиальные пульсирующие колебания (рис. 14.l, з), осциллирующие (рис. 14.1, и) и изгибные с четырьмя узлами по окружности (рис. 14.1, к).
Сферическая система представляет собой тонкую однородную сферическую оболочку (рис. 14.1, л), совершающую практически радиальные пульсирующие колебания.
14.1. Классификация и характеристики преобразователей
а) |
б) |
в) |
г) |
д) |
е) |
ж) |
з) |
и) |
к) |
л) |
Рис. 14.1. Типичные колебательные системы
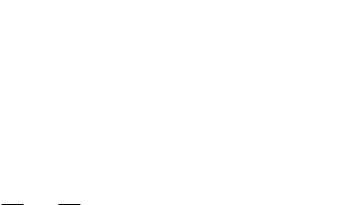
В силовых конструкциях [12] (рис. 14.2, а) забортное гидростатическое давление благодаря механической трансформации вызывает в активном элементе 2 одностороннее напряжение (сжатие), так как внутренний объем 3 корпуса 4 заполнен воздухом при нормальном атмосферном давлении.
Рис. 14.2. Силовая |
(а) и ком- |
|
|
пенсированная |
(б) |
конструк- |
|
ции: 1 — рабочая накладка; |
|
||
2 — активный элемент; 3 — |
|
||
внутренняя полость; 4 — кор- |
|
||
пус; 5 — отверстие для вырав- |
|
||
нивания давления; 6 — ком- |
|
||
пенсатор; 7 — |
акустическая |
|
|
развязка |
|
а) |
б) |
В компенсированных конструкциях [12] (рис. 14.2, б) активный элемент испытывает равномерное всестороннее сжатие, равное забортному гидростатическому давлению, поскольку внутренний объем 3 заполнен газом или жидкостью при этом же давлении.
Преобразователи излучатели оценивают следующими основными показателями работы.
Акустическая мощность РА — количество звуковой энергии, излучаемой преобразователем в единицу времени. Величину РА, отнесенную к единице площади излучающей поверхности, называют удельной акустической мощно-
стью РА. УД.
Электроакустический КПД ЭА — отношение излучаемой акустической мощности к активной электрической мощности РЭ, потребляемой преобразователем от генератора возбуждения.
Входное электрическое сопротивление Z — отношение приложенного напряжения U к силе тока I в цепи излучателя.

14.2. Соотношения электромеханического преобразования
щая х — это инерционное и упругое сопротивления преобразователя; хS — инерционное сопротивление соколеблющейся массы mS. Величины RП, rП, rS отражают потери энергии в электрической цепи, механической части (главным образом в элементах конструкции) и на излучение.
Условие х + хS = хM = 0 определяет резонанс механической колебательной системы. При резонансе излучатель потребляет активную мощность PЭ = = U2 / RП + U2 / RМ = PП + PМ, где РП — мощность электрических потерь; РМ — механическая мощность, RM = (rП + rS) / N2. Механическая мощность
PM U22 RS U22 RM.П PA PM.П , RM RM
где РА — излучаемая акустическая мощность; РМ.П — мощность механических потерь.
Соответственно этапам преобразования подводимой к излучателю энергии рассматривают следующие КПД: Э = PМ / PЭ — электромеханический;
АМ = PА / PМ — акустико-механический; ЭА = ЭМ / АМ = PА / PЭ — электроакустический. Акустико-механический КПД подводных излучателей звука при
резонансе АМ = 0,5...0,8.
В некоторых случаях эффективность излучателя оценивают по звуковому давлению р, создаваемому им в точке на акустической оси при единичных расстоянии r и напряжении U (или силе тока I) на электрическом входе. Отношение pr / U = S называют чувствительностью излучателя по напряжению и измеряют в Па м/В. Отношение pr / I = S называют чувствительностью излучателя по току и измеряют в Па м/А.
Эквивалентная схема преобразователя-приемника (см. рис.14.3) содержит источник энергии звукового поля с ЭДС FЭКВ (контакт К разомкнут), механические сопротивления zН и z, электромеханический трансформатор и электрические сопротивления Z0 и ZН (нагрузка не показана). Если давление р, вызванное звуковым полем, распределено по приемной поверхности преобразователя равномерно (это будет при малых волновых размерах поверхности), то
ЭДС FЭКВ = pS. В общем случае FЭКВ = kД pS, где kД — коэффициент дифракции, зависящий от волновых размеров приемника, его формы, направления
падающей волны.
Преобразование энергии оценивают также коэффициентом электромеханической связи.
Энергетический коэффициент электромеханической связи (КЭМС) определяют отношением генерируемой активным элементом механической (электрической) энергии к полной запасаемой в нем электрической (механической) энергии. Он служит мерой эффективности электромеханического преобразования в активном материале (kM2 ) и в преобразователях (kC2 ). В статическом режиме, практически при частотах значительно ниже основного резонанса, КЭМС зависит только от свойств активного материала. В динамическом режиме КЭМС преобразователя kC2 зависит от вида колебаний, распределения упругих напряжений по объему активного элемента; его называют эффективным КЭМС, причем kC2 kM2 . Величина kC2 связана с частотами резонанса fр и антирезонанса fа приближенным соотношением
k 2 |
1 — (f |
р |
/ f |
). |
(14.2) |
C |
|
а |
|
|

Глава 14. Гидроакустические преобразователи
14.3.Цилиндрические пьезокерамические преобразователи
Преобразователи из пьезокерамического тонкого и короткого кольца (толщина и высота значительно меньше среднего радиуса), совершающего радиальные пульсирующие (нулевая мода) и осциллирующие (первая мода) колебания, показаны на рис. 14.4 [7—9, 12].
а) |
б) |
в) |
Рис. 14.4. Пьезокерамическое кольцо: а — сплошное пульсирующее; б — сплошное осциллирующее; в — секционированное пульсирующее
В последнем случае распределение колебаний в радиальном направлении описывают функцией v( ) = v0cos , в тангенциальном направлении — v( ) = = v0sin , где 0 — амплитуда радиальной скорости колебаний при = 0 [4, 7, 9, 10]. Практически конструкции преобразователей представляют собой набор склеенных колец.
Пьезокерамическое кольцо с использованием поперечного пьезоэффекта (электроды на боковых поверхностях)
Частота механического резонанса: а) ненагруженного кольца
|
|
|
|
|
|
|
|
|
|
|
|
|
E Е |
|
|
/ |
|
|
|
f0 |
|
ю1 |
|
(пульсирующее) |
0 |
|
|||
2 |
< |
, |
(14.3) |
||||||
|
|
|
|
|
к |
|
0 |
|
|
f0 |
2 fp |
|
|
|
|||||
|
(осцилирующее) |
|
|||||||
где r — средний радиус кольца; EюЕ1 — модуль упругости и плотность материала кольца; индекс 01 относится к первой моде колебаний;
б) нагруженного кольца
|
|
|
|
|
|
|
|
|
fp |
f0 / |
1 % ( c)B |
/ ( p d) |
f0 |
/ 1 % ( c)B r / ( c E d), |
(14.4) |
||
|
|
|
|
|
1 |
|
|
|
где % — безразмерный коэффициент реактивного сопротивления излучения, определяемый предварительно на частоте f0.
Методика таких преобразователей приведена в [12].
14.4.Пластинчатые и сферические пьезокерамические преобразователи
14.4.Пластинчатые и сферические пьезокерамические преобразователи
Вдиапазоне частот ниже 5...10 кГц применяют преобразователи, механические системы которых совершают поперечные колебания изгиба. Как правило, эти преобразователи в режиме приема используют в области частот ниже резонансной. Форма колебаний, собственные частоты и электроакустические параметры их зависят от условий закрепления активных элементов [7—9, 12, 15].
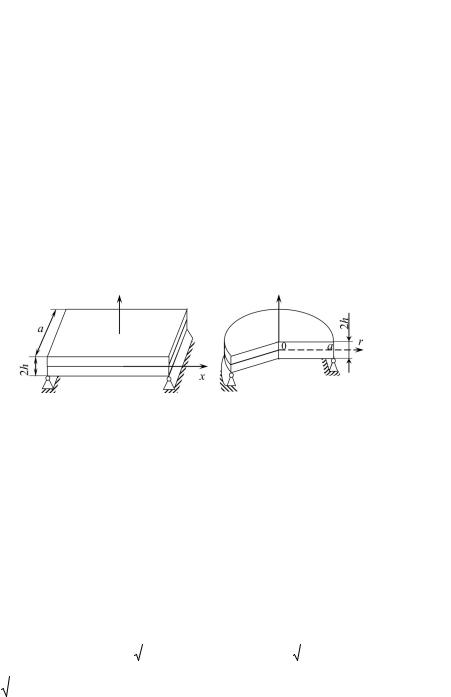
Колебательную систему пластинчатых (биморфных) преобразователей выполняют в виде двухслойных прямоугольных или круглых пьезокерамических пластин, опертых по противоположным ребрам (рис. 14.5, а) или по периметру (рис. 14.5, б), т.е. симметричных или асимметричных биморфных элементов.
а) |
б) |
Рис. 14.5. Колебательные системы прямоугольного (а) и круглого (б) пластинчатых (биморфных) преобразователей
Форма колебаний тонкой пластины определяется выражениями [8, 9, 12]:
f (x) sin(<x / l); f (r) 1,04J0 (2,2r / a) 0,04N 0 (2,2r / a), |
(14.5) |
где J0 и N0 — функции Бесселя 1-го и 2-го рода. Эквивалентные сосредоточенные параметры
|
|
|
|
mэкв ahl; mэкв |
0,6< a2 h; |
|
|
(14.6) |
|||
|
|
Cэкв |
3(1 2 )l 3 / (< 4 E E ah3); Cэкв 3(1 2 )a2 |
/ (46E E |
h3). |
||||||
|
|
|
|
|
ю1 |
|
|
ю1 |
|
||
где s E |
/ s E |
— коэффициент Пуассона; E E |
1 / s E |
— модуль Юнга мате- |
|||||||
12 |
11 |
|
|
|
ю1 |
11 |
|
|
|
||
риала пластин. |
|
|
|
|
|
|
|
|
|||
Резонансные частоты ненагруженного преобразователя |
|
||||||||||
|
|
|
|
|
|
|
|
||||
|
|
|
f0 0,9c E h / (l 2 |
1 2 |
); f0 |
0,45c E h / (a2 |
1 2 |
), |
(14.7) |
||
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где c E E E . |
|
|
|
|
|
|
|
|
|||
1 |
|
ю1 |
|
|
|
|
|
|
|
|
|
Коэффициент электромеханической трансформации |
|
|
|
||||||||
|
|
|
|
N < d31E E ah / [l(1 )]; N 4,5d31E E h / (1 ). |
(14.8) |
||||||
|
|
|
|
ю1 |
|
ю1 |
|
|
|
||
Преобразователи с активным элементом в форме полой сферической оболочки используют в качестве измерительных излучателей и приемников [10]. Расчет сферического преобразователя тождествен расчету цилиндрического преобразователя, изложенному в п. 9.3.


 2
2
 1
1 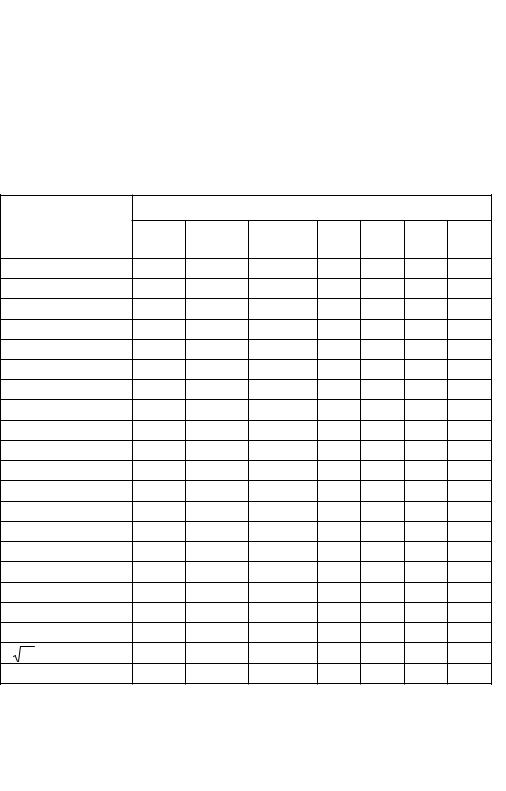
|
|
14.5. Стержневые магнитострикционные преобразователи |
||||||
Коэффициент электромеханической трансформации |
|
|
|
|||||
|
|
|
N a / n, |
|
|
|
(14.17) |
|
где а — магнитострикционная постоянная (табл. 14.1); n — число витков на |
||||||||
одном стержне. |
|
|
|
|
|
|
|
|
|
Таблица 14.1. Значения постоянных и параметров эффективности некоторых |
|||||||
|
магнитострикционных материалов |
|
|
|
|
|||
|
|
|
|
Марки материалов |
|
|
|
|
Параметры и постоянные |
Никель |
Пермендюр |
Сплав |
Сплав |
Феррит |
Феррит |
Феррит |
|
|
|
|||||||
|
|
НП2Т |
50КФ |
никоси |
12Ю |
Ф86 |
Ф107 |
21СПА |
, кг/ма |
8900 |
8200 |
8800 |
6700 |
5200 |
5200 |
5200 |
|
ЕВ 10-10, Па |
21,5 |
20,5 |
19 |
15,8 |
17 |
17 |
17,9 |
|
сВ, м/с |
4900 |
5200 |
4600 |
4800 |
5700 |
5700 |
5860 |
|
Тр 10-5, Па |
3600 |
5000 |
4100 |
7500 |
314 |
340 |
200 |
|
107,Ом м |
0,7 |
3,4 |
1,6-1,8 |
9,0 |
1000 |
1000 |
107 |
|
Π |
|
|
|
|
|
|
|
|
Нс, А/м |
160 |
136 |
16-24 |
9,6 |
|
|
224 |
|
Вs, Тл |
0,61 |
2,4 |
0,0495 |
1,5 |
0,4 |
0,35 |
0,32 |
|
нач/ 0 |
1000 |
700 |
1400 |
1000 |
120 |
85 |
44 |
|
Σ ? / 0 |
35 |
200 |
220 |
300 |
30 |
30 |
16 |
|
Н k |
10 2, А/м |
12-16 |
3,2-5,6 |
4,0 |
3,2-5,6 |
8,0 |
8,0 |
12-16 |
ÏÎË |
|
|
|
|
|
|
|
|
H a |
10 2, А/м |
36 |
32 |
9,6 |
28 |
28 |
9,6 |
28 |
ÏÎË |
|
|
|
|
|
|
|
|
106 |
|
- (30-35) |
60-70 |
25-28 |
35-40 |
-19 |
|
-26 |
S |
|
|
|
|
|
|
|
|
а 10-7, Н/Вб |
2,3 |
2,2 |
1,8 |
0,85 |
2,0 |
2,6 |
2,35 |
|
k33 |
|
0,26 |
0,49 |
0,49 |
0,30 |
0,27 |
0,38 |
0,21 |
аk 10 7, Н/Вб |
1,9 |
1,75 |
1,8 |
0,65 |
1,9 |
2,4 |
2,0 |
|
Τ109, Н/Вб |
4,2 |
27 |
22 |
20 |
|
5,8 |
2,8 |
|
( ÎÏÒk |
/ Π ) 10 2, с/м2 |
6,28 |
7,5 |
17,27-15,35 |
4,18 |
0,37 |
0,37 |
0 |
tg , % |
5,0 |
35 |
|
9,0 |
0,2 |
2,0 |
3,5 |
|
(a rs ) 10 7, Н/Вб |
66,5 |
350 |
396 |
195 |
57 |
72 |
32 |
|
(a rs ) 10 7, Н/Вб |
11,2 |
24,5 |
27 |
11,2 |
10,4 |
13,1 |
8,0 |
|
(a Tr /E B )k 103, м2/ Вб |
3,1 |
17,0 |
20,9 |
12,3 |
3,3 |
4,3 |
1,8 |
|
Эквивалентные сосредоточенные параметры
|
|
|
|
|
Cэкв |
1 / 2pmэкв . |
|
|
|
|
|
(14.18) |
|||||
Механическая добротность |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
<( c) |
& |
)2l |
Ρ |
|
l |
|
2<l |
Ρ |
|
2<l |
Ρ |
, |
|
|||
Q |
|
Ρ àì |
+ |
|
|
/ |
1 |
cos2 |
|
q sin2 |
|
. |
(14.19) |
||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
Ρ |
|
|
|
Ρ |
|
|
. |
|
||||||
|
( с)Â |
|
q |
Ρ − |
|
||||||||||||