литература / Sharapov_V._Datchiki
.pdf
15.7. Оптические методы
По характеру взаимодействия поля с контролируемым объектом различают методы: пассивный или собственного излучения (на объект не воздействуют внешним источником энергии) и активный (объект нагревают или охлаждают от внешнего источника). Имеряемым информативным параметром является температура либо тепловой поток [10, 21].
При контроле пассивным методом измеряют тепловые потоки или температурные поля работающих объектов с целью определения неисправностей, проявляющихся в виде мест повышенного нагрева. Таким образом выявляют уменьшение толщины футеровки доменных и мартеновских печей, места утечки теплоты в зданиях, участки электроцепей и радиосхем с повышенным нагревом, находят трещины в двигателях и т.д.
При контроле активным методом объект обычно нагревают контактным либо бесконтактным способом, стационарным либо импульсным источником тепла и измеряют температуру или тепловой поток с той же или с другой стороны объекта. Это позволяет обнаруживать несплошности (трещины, пористость, инородные включения) в объектах, изменения в структуре и физико-хи- мических свойствах материалов по изменению теплопроводности, теплоемкости, коэффициенту теплоотдачи. Таким способом выявляют участки с плохой теплопроводностью в многослойных панелях. Неплотное прилегание слоев и дефекты обнаруживают как участки повышенного или пониженного нагрева поверхности панели.
Измерения температур или тепловых потоков выполняют контактным или бесконтактным способами. В последнем случае передача теплоты происходит в основном за счет радиации, т.е. излучения электромагнитных волн в инфракрасной или видимой части спектра в зависимости от температуры тела. Наиболее эффективным средством бесконтактного наблюдения, регистрации температурных полей и тепловых потоков является сканирующий термовизор.
Некоторые типы датчиков температуры описаны в гл. 11.
15.7. Оптические методы
Эти методы неразрушающего контроля основаны на наблюдении или регистрации параметров оптического излучения, взаимодействующего с контролируемым объектом [10, 21]. По характеру взаимодействия различают методы про шедшего, отраженного, рассеянного и индуцированного излучения. Последним термином определяют оптическое излучение объекта под действием внешнего воздействия, например, люминесценцию. Первичными информативными параметрами являются амплитуда, фаза, степень поляризации, частота или частотный спектр, время прохождения света через объект, геометрия преломления и отражения лучей.
Оптические методы имеют широкое применение благодаря большому разнообразию способов получения первичной информации. Возможность их применения для наружного контроля не зависит от материала объекта. Самым простым методом является органолептический визуальный контроль, с помощью которого находят видимые дефекты, отклонения от заданных формы,

Глава 15. Преобразователи для неразрушающего контроля
цвета и т.д. Применение инструментов (визуально оптический контроль) типа луп, микроскопов, эндоскопов для осмотра внутренних полостей, проекционных устройств для контроля формы изделий, спроектированных в увеличенном виде на экран, значительно расширяет возможности оптического метода. Использование интерференции позволяет с точностью до 0,1 длины волны контролировать сферичность, плоскостность, шероховатость, толщину изделий. Дифракцию применяют для контроля диаметров тонких волокон, толщины лент, форм острых кромок.
Оптические методы широко применяют для контроля прозрачных объектов. В них обнаруживают макро- и микродефекты, структурные неоднородности, внутренние напряжения (по вращению плоскости поляризации). Использование гибких световодов, лазеров оптической голографии, телевизионной техники резко расширило область применения оптических методов, повысило точность измерения.
Некоторые сведения о преобразовании световых потоков и детекторах оптического излучения можно найти в гл. 6, 18.
15.8. Радиационные методы
Эти методы неразрушающего контроля основаны на регистрации и анализе проникающего ионизирующего излучения после взаимодействия его с контролируемым объектом [6, 10, 21-24]. В зависимости от природы ионизирующего излучения методы контроля подразделяют на: рентгеновский, гамма, бета (поток электронов), нейтронный методы контроля. В последнее время находят применение также потоки позитронов, по степени поглощения которых определяют участки объекта, обедненные или обогащенные электронами [6, 10, 21-24].
Наиболее широко используют для контроля рентгеновское и гамма-излу- чение. Их можно использовать для контроля изделий из самых различных материалов, подбирая благоприятный частотный диапазон. Напомним, что эти виды излучения являются электромагнитными волнами.
По характеру взаимодействия с контролируемым объектом основным способом радиационного (рентгеновского и гамма) контроля является метод прохож дения. Он основан на разном поглощении излучения материалом изделия и дефектом. Таким образом, информативным параметром здесь является плотность потока излучения: В местах утончений и дефектов плотность прошедшего потока возрастает. Чем больше толщина изделия, тем более высокочастотное (более жесткое) излучение применяют для контроля: рентгеновское, гамма (от распада ядер атомов), жесткое тормозное (от ускорителя электронов: бетатрона, микротрона, линейного ускорителя). Предельное значение толщины стали, контролируемое с помощью излучения последнего типа, — около 600 мм.
Приемником излучения служит, например, рентгенопленка (радиографиче ский метод), сканирующий сцинтилляционный счетчик частиц и протонов (радиометрический метод), флуоресцирующий экран с последующим преобразованием изображения в телевизионное (радиоскопический метод) и т.д.
Некоторые типы детекторов радиоактивного излучения описаны в гл. 19.

15.10.Акустические методы неразрушающего контроля
15.9.Неразрушающий контроль проникающими веществами
Эти методы основаны на проникновении пробных веществ в полость дефектов контролируемого объекта. Их делят на методы капиллярные и течеискания.
Капиллярные методы основаны на капиллярном проникновении в полость дефекта индикаторной жидкости (керосина, скипидара), хорошо смачивающей материал изделия. Их применяют для обнаружения слабо видимых невооруженным глазом поверхностных дефектов.
Методы течеискания используют для выявления только сквозных дефектов в перегородках. В полость дефекта пробное вещество проникает либо под действием разности давлений, либо под действием капиллярных сил, однако в последнем случае нанесение в индикацию пробных веществ выполняют по разные стороны перегородки [2, 10, 16].
15.10.Акустические методы неразрушающего контроля
Среди многочисленных методов неразрушающего контроля, использующих различные физические поля, взаимодействующие с объектом контроля, широкое распространение получили акустические (ультразвуковые) методы. Это объясняется многими факторами. Например, им не свойственны, как утверждается в [25], такие недостатки магнитных и электромагнитных методов, как неоднозначность показаний приборов и сильная зависимость от ничтожных изменений химического состава материала в пределах даже одной его марки, а при контроле многих неметаллических материалов (керамики, бетона) акустические методы часто просто незаменимы.
В неразрушающем контроле применяют многие типы ультразвуковых волн, не обладающих дисперсией скорости: объемные продольные и поперечные (сдвиговые) волны, поверхностные волны Рэлея, поверхностные (подповерхностные) продольные, или, как их еще называют, головные «чисто» продольные волны [3, 10, 11, 15, 20, 21, 25, 26].
Акустические методы неразрушающего контроля основаны на регистрации параметров упругих волн, возникающих или возбуждаемых в объекте. Чаще всего используют упругие волны ультразвукового диапазона (с частотой колебаний выше 20 кГц), этот метод называют ультразвуковым. В отличие от всех ранее рассмотренных методов, здесь применяют и регистрируют не электромагнитные, а упругие волны, параметры которых тесно связаны с такими свойствами материалов, как упругость, плотность, анизотропия (неравномерность свойств по различным направлениям) и др. Акустические свойства твердых материалов и воздуха настолько сильно отличаются, что акустические волны отражаются от тончайших зазоров (трещин, непроваров) шириной 10-6—10-4 мм. Этот вид контроля применим ко всем материалам, достаточно хорошо проводящим акустические волны: металлам, пластмассам, керамике, бетону и т.д. [1, 3—5, 7, 9—15, 18—21, 25—28].
Глава 15. Преобразователи для неразрушающего контроля
По характеру взаимодействия с объектом различают пассивный и активный
методы.
Пассивный акустический метод предусматривает регистрацию упругих волн, возникающих в самом объекте. Шумы работающего механизма позволяют судить о исправности или неисправности механизма и даже о характере неисправности. Этот пассивный метод акустического контроля называют шумовиб рационным. Многие машины снабжают датчиками, регистрирующими уровень вибрации определенных узлов и прогнозирующими их работоспособность. Это вибрационный метод контроля или диагностики [10, 17, 21].
Перестройка структуры материала, вызываемая движением групп дислокаций, возникновением и развитием трещин, аллотропическими превращениями в кристаллической решетке, сопровождается появлением упругих волн ультразвукового (реже звукового) диапазона. На использовании этих волн основан метод акустической эмиссии. Используя такие информативные параметры, как количество сигналов в единицу времени, их частота, амплитудное распределение, локация места возникновения упругих волн, судят о состоянии материала, происходящих в нем изменениях, прогнозируют работоспособность конструкции [10, 11, 17, 18, 21].
Активные ультразвуковые методы разнообразнее по схемам применения и получили гораздо более широкое распространение. Для контроля используют стоячие волны (вынужденные или свободные колебания объекта контроля или его части), бегущие волны по схемам прохождения и отражения. Методы колебаний используют для измерения толщин при одностороннем доступе и контроля свойств материалов (модуля упругости, коэффициента затухания). Информативным параметром служат частоты свободных или вынужденных колебаний и их амплитуды. Используют также метод, основанный на измерении режима колебаний преобразователя, соприкасающегося с объектом (импе дансный метод). По амплитудам и резонансным частотам такого преобразователя (часто имеющего вид стержня) судят о твердости материала изделия, по-
|
|
|
|
|
датливости |
(упругому импедансу) его |
|||
1 |
2 |
3 |
5 |
|
поверхности. Податливость, в частно- |
||||
|
|
8 |
|
10 |
сти, улучшается под влиянием дефек- |
||||
|
|
4 |
9 |
|
тов, близких к поверхности изделия. |
||||
|
|
|
|
|
Наиболее широкое распространение |
||||
|
|
|
|
|
получил метод отражения, или эхо ме |
||||
|
|
6 |
7 |
|
тод (рис. 15.5). Преобразователь 1 воз- |
||||
а) |
|
1 |
2 |
3 |
буждает в объекте контроля 2 ультра- |
||||
|
|
звуковой (акустический) |
импульс. Он |
||||||
|
|
K 4,6 |
|
|
|||||
|
|
|
|
|
отражается |
от |
нижней |
поверхности |
|
|
|
|
|
|
объекта или дефекта 3 и принимается |
||||
|
|
|
|
|
тем же (или другим) преобразователем. |
||||
б) |
|
|
|
|
Генераторы электрических импульсов 4 |
||||
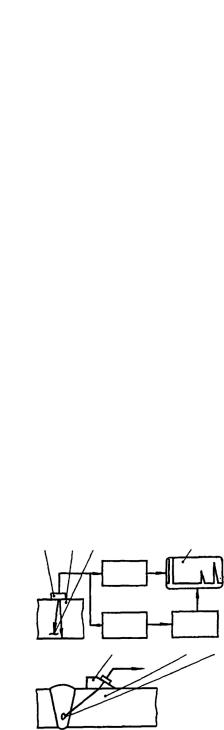
Рис. 15.5. Схема импульсного ультразву- |
и 6 синхронизированы с генератором |
||||||||
развертки 7 электронно-лучевой труб- |
|||||||||
кового дефектоскопа: а — контроль по- |
ки 5. Отраженные сигналы усиливают- |
||||||||
ковки |
прямым преобразователем; б — |
||||||||
ся и вызывают |
появление на линии |
||||||||
контроль |
сварного шва |
наклонным |
|||||||
развертки пиков. На рис. 15.5, а пока- |
|||||||||
преобразователем |
|
|
|||||||

15.11. Пьезоэлектрические преобразователи для неразрушающего контроля
заны посылаемый в изделие сигнал 8, эхо-сигнал от дефекта 9 и донный сигнал 10. Информативными параметрами в этом случае являются амплитуда и время прихода импульсов.
Эхо-метод очень широко применяют для дефектоскопии металлических заготовок и сварных соединений (pис. 15.5, б), контроля структуры металлов, измерения толщины труб и сосудов. Значительно реже используют метод прохождения. Им дефектоскопируют изделия простой формы (листы), оценивают прочность бетона, дерева и других материалов, в которых прочность коррелирует со скоростью ультразвука [10, 21, 26].
Средством возбуждения и приема ультразвуковых волн, как правило, являются пьезопреобразователи. Учитывая сильнее отражение ультразвука от тончайших воздушных зазоров, для передачи волн от пьезопреобразователя к изделию используют жидкостный контакт. Для возбуждения волн звукового диапазона кроме пьезопреобразователей применяют ударное воздействие, а для приема — микрофоны [10, 21, 26].
Из многочисленных направлений развития акустических методов контроля назовем разработку бесконтактных преобразователей: лазерных возбудителей и приемников, электромагнитно-акустических преобразователей, основанных на возбуждении колебаний поверхности объекта внешним электромагнитным полем.
Ряд работ направлен на отстройку от шумов, главным образом связанных с отражением упругих волн от структурных неоднородностей, например, границ кристаллов в поликристаллическом материале. Осваивается применение специфических типов упругих волн в твердом теле: поверхностных волн, волн в пластинах и стержнях [3]. Разработка средств высокоточного измерения скорости ультразвуковых волн открывает возможности измерения внутренних напряжений в твердых телах по изменению скорости или затухания [9—11, 25].
Некоторые типы пьезоэлектрических преобразователей (датчиков) описаны в гл. 9. Однако применяемые в неразрушающем контроле преобразователи имеют тонкости, описанию которых посвящен следующий раздел.
15.11.Пьезоэлектрические преобразователи для неразрушающего контроля
Разработке пьезоэлектрических преобразователей для неразрушающего контроля посвящены фундаментальные работы Алешина Н.П., Бобренко В.М., Вопилкина А.Х., Выборнова Б.И., Гурвича А.К., Домаркаса В.И., Ермолова И.Н., Карнельсона А.Е., Королева В.В., Клюева В.В., Куценко А.Н., Ланге Ю.В., Полякова В.Е., Потапова А.И., Сборовского А.К., Шкарлет Ю.М. и многих других [1, 4, 5, 7, 9—14, 17, 19—21, 25—27].
В зависимости от вида и назначения ультразвуковых (УЗ) приборов используются различные типы пьезопреобразователей:
—контактные и иммерсионные;
—с УЗ линией задержки (УЛЗ) и без нее;
—прямые и наклонные;
Глава 15. Преобразователи для неразрушающего контроля
—с возбуждением продольных, сдвиговых, поверхностных, нормальных и головных волн; раздельные, совмещенные и раздельно-совмещенные; низко- и высокочастотные; узко- и широкополосные; фокусирующие и нефокусирующие и т.д. [7-14, 25].
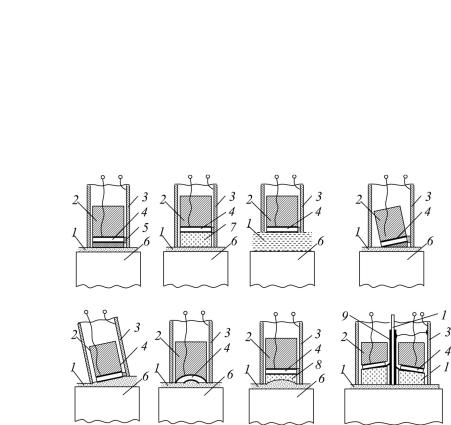
На рис. 15.6 представлены основные типы пьезопреобразователей для УЗ приборов.
а) |
б) |
в) |
г) |
д) |
е) |
ж) |
з) |
Рис. 15.6. Основные типы |
пьезопреобразователей неразрушающего контроля: |
||
а — контактный нормальный; б — контактный нормальный с твердотельной УЛЗ; в — иммерсионный нормальный; г — контактный наклонный; д — иммерсионный наклонный; е — фокусирующий; ж — фокусирующий с линзой; з — раздельно-совмещенный; 1 — слой контактной смазки или иммерсионная жидкость; 2 — демпфер; 3 — корпус; 4 — пьезоэлемент; 5 — протектор; 6 — исследуемый объект; 7 — твердотельная УЛЗ; 8 — акустическая линза; 9 и 10 — электроакустический экран; 11 — призма
Нормальные пьезопреобразователи (рис. 15.6, а, б, в) излучают в исследуемый объект, а затем принимают продольные УЗ волны. Они могут быть выполнены в контактном (рис. 15.6, а) или иммерсионном (рис. 15.6, в) вариантах, а также с твердотельной УЛЗ (рис. 15.6, б). Наклонные преобразователи (рис. 15.6, г, д) используются для излучения и приема наклонных продольных волн. Кроме того, на границе раздела сред в результате трансформации получаются сдвиговые, поверхностные, нормальные и головные волны. Фокусирующие пьезопреобразователи осуществляют фокусировку УЗ волн за счет формы самого пьезоэлемента (рис. 15.6, е) или благодаря наличию акустической линзы (рис. 15.6, ж). На рис. 15.6, з показан раздельно-совмещенный преобразователь, обладающий рядом преимуществ перед совмещенными. В частности, он имеет меньшую мертвую зону.
В контактных преобразователях (рис. 15.6, а, б, г) толщина слоя контактной смазки много меньше длины волны излучаемых УЗ колебаний, а в им-

15.11. Пьезоэлектрические преобразователи для неразрушающего контроля
мерсионных (рис. 15.6, в, д) толщина слоя иммерсионной жидкости много больше . Часто используются так называемые щелевые преобразователи, у которых толщина слоя жидкости между исследуемым объектом и преобразователем составляет несколько .
Контактные преобразователи применяют при исследовании изделий с хорошо обработанной поверхностью, если отсутствуют высокие требования к стабильности акустического контакта. При работе иммерсионный преобразователь и исследуемый объект (обычно небольших размеров) помещают в ванну с жидкостью. При этом значительно повышается стабильность акустического контакта с изделием и появляется возможность автоматизации процесса контроля изделий.
При использовании щелевого преобразователя между ним и изделием образуется зазор, в который непрерывно подается контактная жидкость, что позволяет, например, автоматизировать контроль крупногабаритных изделий, не помещая их в ванну с иммерсионной жидкостью.
Совмещенные преобразователи с твердотельной УЛЗ (рис. 15.6, б) применяют для уменьшения мертвой зоны (т.е. неконтролируемой области изделия), возникающей в основном из-за воздействия мощного возбуждающего электрического импульса на вход чувствительного приемного усилителя. Для этой же цели служат и раздельно-совмещенные преобразователи (рис. 15.6, з).
Для повышения направленности излучения, увеличения амплитуды принимаемых сигналов и отношения сигнал/помеха используются фокусирующие преобразователи (рис. 15.6, е, ж), позволяющие, при прочих равных условиях, повысить фронтальную разрешающую способность аппаратуры.
При исследовании объектов с помощью сдвиговых, головных, поверхностных или нормальных волн применяют наклонные преобразователи (рис. 15.6, г, д) с разными углами ввода УЗ колебаний. В зависимости от формы изделия и характера контролируемых параметров предпочтительным или даже необходимым является применение того или иного вида волн, например, при дефектоскопии тонкостенных изделий — нормальных волн, при выявлении подповерхностных дефектов — головных волн и т.д. [25].
В настоящее время в подавляющем большинстве случаев для реализации всех перечисленных конструкций пьезопреобразователей, отличающихся типом излучаемых и принимаемых УЗ волн, степенью и типом фокусировки, способами контакта с изделием и ввода в него акустических колебаний, взаимным расположением излучателя и приемника и другими факторами, используют пьезоэлементы, излучающие и принимающие продольные объемные УЗ волны.
Придавая пьезоэлементу различную форму, по-разному располагая его относительно объекта исследования и наделяя его функциями излучателя, прием ника или излучателя приемника, можно получить различные режимы работы. Поэтому решение проблемы создания базового широкополосного пьезопреобразователя продольных волн открывает возможность разработки и изготовления широкополосных преобразователей различных типов. При этом характеристики преобразователей могут быть определены непосредственно по параметрам пьезоэлемента, генерирующего и принимающего продольные УЗ волны, путем пересчета согласно известным законам акустики. Например, в

Глава 15. Преобразователи для неразрушающего контроля
наклонных преобразователях амплитуду излученного и принятого УЗ сигналов, а также акустическое поле, создаваемое в изделии, можно определить по параметрам пьезоэлемента методом мнимого излучателя УЗ волн [10, 11, 25].
К параметрам преобразователей для неразрушающего контроля относятся чувствительность, резонансная частота, полоса частот, направленность, мертвая зона, уровень акустических помех, генерируемых самим преобразователем, коэффициент двойного преобразования.
Практически все пьезопреобразователи для приборов неразрушающего контроля работают в импульсном режиме. В связи с этим одной из важнейших характеристик преобразователей является ширина полосы их рабочих частот. Чем шире эта полоса, тем выше разрешающая способность приборов, меньше мертвая зона, ниже погрешность измерения толщины изделия, координат дефектов, скорости ультразвука.
Необходимо отметить, что подобного типа преобразователи используются и в гидроакустике (см. гл. 14), а также в медицине, в приборах для ультразвуковой интроскопии (УЗИ).
Рассмотрим основные характеристики, определяющие свойства пьезопреобразователя продольных УЗ волн [25].
Коэффициенты электромеханического преобразования
Коэффициент прямого преобразования L характеризует эффективность работы пьезопреобразователя в режиме излучения:
L = P1СР / U0, |
(15.1) |
где P1СР — среднее значение амплитуды акустического давления излученной волны; U0 — амплитуда электрического напряжения, возбуждающего преобразователь в режиме излучения.
Коэффициент обратного преобразования М характеризует эффективность работы пьезопреобразователя в режиме приема:
M = U / P2СР |
(15.2) |
или |
|
M = I / P2СР, |
(15.3) |
где Р2СР — среднее значение амплитуды УЗ волны, приходящей на преобразователь; U и I — соответственно электрические напряжения и ток, возникающие между электродами пьезопреобразователя в режиме приема.
В большинстве случаев для определения М целесообразнее использовать формулу (10.3).
Коэффициент двойного электромеханического преобразования характеризует эффективность работы совмещенного пьезопреобразователя в режиме из- лучение—прием:
D = LM. (15.4).
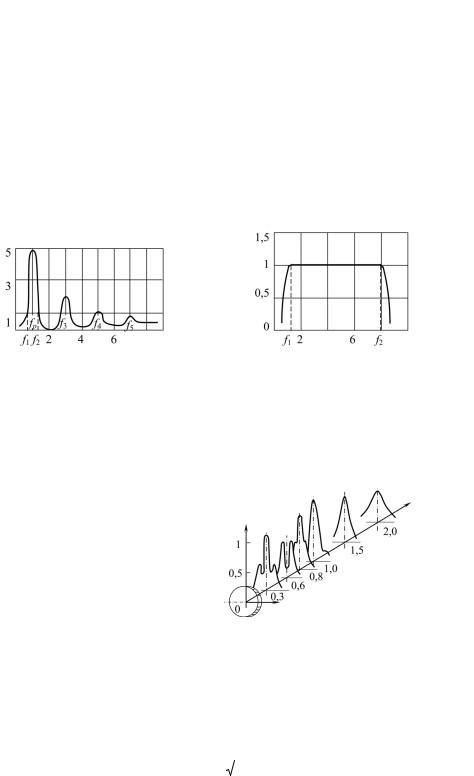
Амплитудно-частотная характеристика (АЧХ) пьезопреобразователя
Она показывает изменение модуля коэффициента преобразования в зависимости от частоты. На рис. 15.7 представлена типичная АЧХ полуволновой резонансной пьезопластины.