

3.2.3. Основные понятия о приводе
Совокупность устройств, приводящих в действие рабочие органы металлорежущих станков, называют приводом. Он состоит из двигателя и механизмов, передающих движение рабочим органам. Для приводов металлорежущих станков применяют обычно односкоростные асинхронные электродвигатели переменного тока с короткозамкнутым ротором, с синхронной частотой вращения 3000, 1500, 1000 и 750 мин-1. Обладая жесткой характеристикой, эти двигатели обеспечивают постоянство мощности во всем диапазоне скоростей и незначительное изменение частоты вращения вала под нагрузкой. Используют также многоскоростные двигатели переменного тока и, в частности, двухскоростные – 1500/3000, 750/1500 мин-1, трехскоростные – 1000/1500/3000 мин-1и др.
При электрическом регулировании частоты вращения находят применение двигатели постоянного тока с тиристорным управлением, которые позволяют регулировать частоту вращения валов в диапазоне порядка 10:1. Включение переборов с электромагнитными муфтами дает возможность еще более расширить этот диапазон. В станках с числовым программным управлением применяют шаговые двигатели, быстродействие которых достигает 8 кГц и выше.
3.2.4. Кинематические связи в станках
Каждое исполнительное движение в станках осуществляется кинематической группой, представляющей собой совокупность источника движения, исполнительного органа, кинематических связей и органов настроек, обеспечивающих требуемые параметры движения. Структура кинематической группы может быть разнообразной и зависит от характера осуществляемого движения, числа исполнительных органов, потребности регулирования параметров движения.
Под исполнительными органами понимают подвижные конечные звенья кинематической группы, непосредственно участвующие в образовании траектории исполнительного движения. Исполнительные органы, осуществляющие абсолютное или относительное движение заготовки или режущего инструмента в процессе формообразования, называют рабочими. Например, рабочими органами являются такие звенья станка, как стол, шпиндель, суппорт, ползун.
В большинстве случаев исполнительные органы совершают вращательное или прямолинейное движение, т.е. являются подвижными звеньями вращательной или поступательной исполнительной кинематической пары. В зависимости от числа исполнительных органов кинематические группы делятся на простые и сложные. Простые группы имеют один исполнительный орган, а сложные два и более исполнительных органов. Любая кинематическая группа включает в себя два качественно различных вида кинематической связи – внутреннюю и внешнюю.
Под кинематической связью в станках понимают связь между звеньями или исполнительными органами станка, накладывающую условия ограничения, не позволяющие занимать звеньям произвольные положения в пространстве относительно друг друга и иметь произвольные скорости.
Под внутренней кинематической связью группы понимают совокупность кинематических звеньев и их соединений, обеспечивающих качественную характеристику движения – его траекторию. Внутренняя кинематическая связь группы в станках реализуется разными путями в зависимости от характера исполнительного движения, числа исполнительных органов в группе, требуемой точности образуемой производящей линии (траектории движения) и других факторов.
Необходимое минимальное число внутренних кинематических цепей в сложной группе не должно быть меньше, чем на единицу числа исполнительных органов. Например, группа, обеспечивающая сложное движение (В1В2) и имеющая два исполнительных органаIиII, должна содержать в своей структуре, как минимум, одну внутреннюю кинематическую цепь1–4–2 между исполнительными органами (рис.10,а).
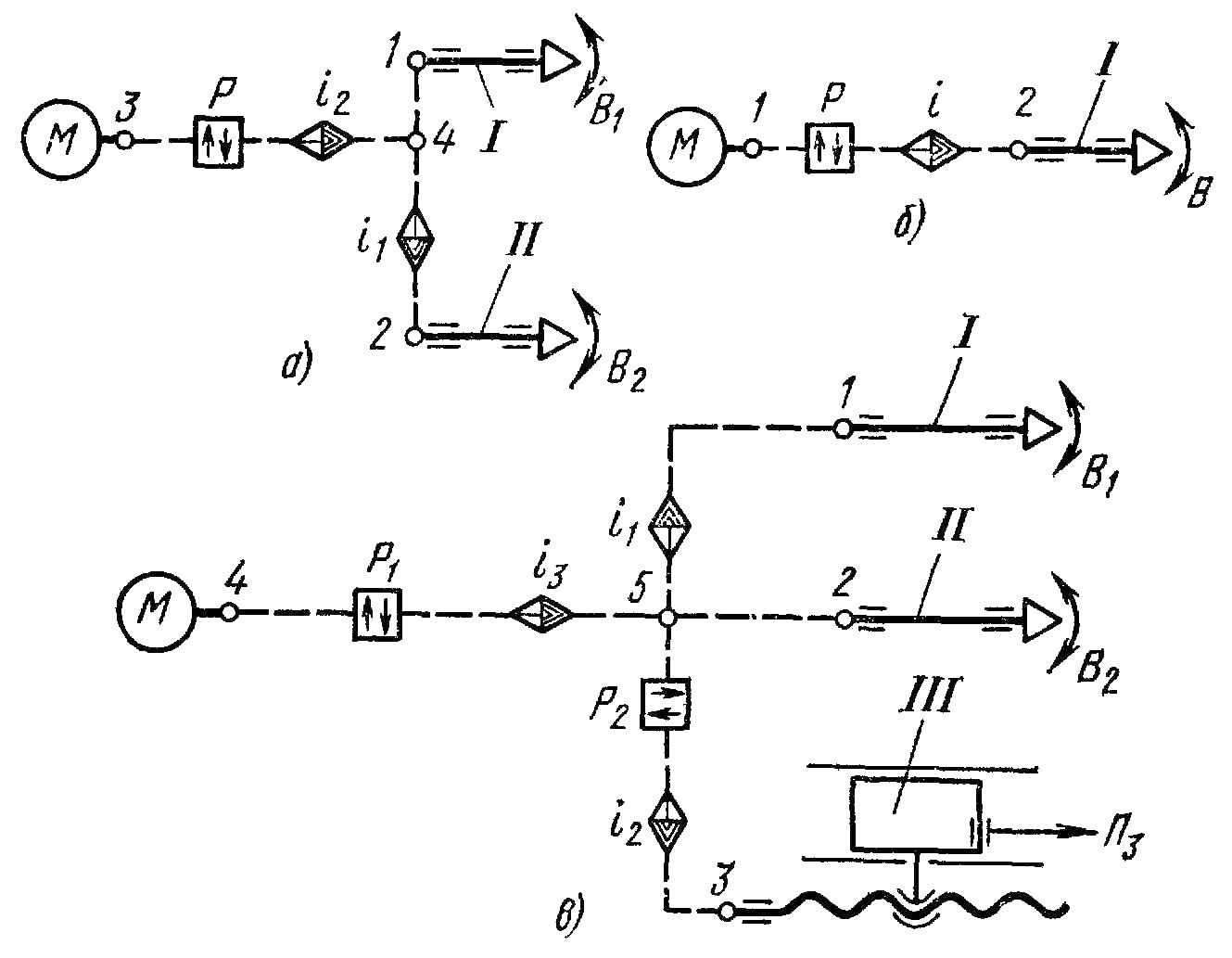
Рис.10. Структурные схемы кинематических групп:
а – сложной с двумя исполнительными органами; б – простой;
в – сложной с тремя исполнительными органами
Под внешней кинематической связью группы понимают совокупность кинематических звеньев и их соединений, обеспечивающих количественные характеристики движения, т.е. его скорость, направление, путь и исходную точку. Обычно внешняя кинематическая связь сложной группы реализуется в виде кинематической цепи3–4 между источником движенияМ и одним из звеньев внутренней связи группы. Для простой кинематической группы внешняя кинематическая связь есть цепь1–2между источником движенияМ и исполнительным органом группыI(рис.10,б). Внешняя кинематическая связь предназначена для передачи энергии от источника движенияМво внутреннюю связь группы. На рис.10,в показана структурная схема кинематической группы, обеспечивающей исполнительное движение (В1В2П3) и имеющей три исполнительных органа. Для обеспечения функциональной согласованности перемещений или скоростей исполнительных органовI,IIиIIIдостаточно двух функциональных кинематических цепей, например,1–5–2и2–5–3 или другого их сочетания. Внешняя кинематическая связь группы реализуется кинематической цепью4–5.
Для изменения и регулирования параметров движения в станках используют специальные устройства, которые в общем случае называются органами настройки.
Органы настройки, регулирующие количественные характеристики движения, всегда располагают во внешней связи кинематической группы (в цепи между источником движения и внутренней кинематической связью группы).
Органы настройки, регулирующие качественную характеристику движения, располагают только во внутренней кинематической связи группы. Причем в простых кинематических группах, имеющих один исполнительный орган и обеспечивающих вращательное или прямолинейное движение, необходимость в органе настройки на траекторию отсутствует. Это связано с тем, что траектория движения в таких группах неизменна и обеспечивается характером соединения звеньев исполнительной кинематической пары, одним из которых является сам исполнительный орган. Сложные кинематические группы всегда имеют органы настройки на траекторию. Таких органов может быть несколько, но не меньше числа внутренних кинематических цепей в группе. Например, если группа имеет две внутренние кинематические цепи, то органов настройки на траекторию должно быть, как минимум, два, т.е. по органу настройки на каждую внутреннюю кинематическую цепь (см. рис.10).