

3.2.6. Кинематическая настройка станков
Под кинематической настройкой станка понимают настройку его цепей, обеспечивающую требуемые скорости движений исполнительных органов станка, а также, при необходимости, условия кинематического согласования перемещений или скоростей исполнительных органов между собой. Цель таких согласований – образование поверхности с заданными формой, размерами, точностью и шероховатостью. Кинематическая настройка является составной частью наладки станка.
В большинстве металлорежущих станков с механическими связями для настройки кинематических цепей применяют органы настройки в виде гитар сменных зубчатых колес, а также ременных передач, вариаторов, регулируемых электродвигателей, коробок скоростей и подач, характеристикой которых является общее передаточное отношение iоргана. Значение передаточного отношения органа настройки определяют по формуле настройки и затем реализуют в гитарах сменных зубчатых колес подбором и установкой соответствующих колес в гитаре, а в коробках скоростей и подач – зацеплением соответствующих зубчатых колес.
Для вывода формулы любого органа кинематической настройки необходимо по кинематической схеме станка наметить такую цепь передач, в которой расположен данный орган и известны перемещения или скорости конечных звеньев этой цепи, связанные функциональной или требуемой зависимостью. Желательно, чтобы такая цепь передач, называемая цепью согласования, включала в себя только один орган настройки, для которого выводят формулу. Для выбранной цепи составляют условие кинематического согласования перемещений ее конечных звеньев, совершающихся в течение определенного промежутка времени, или их скоростей. С учетом условия согласования перемещений или скоростей составляют уравнение кинематического баланса цепи согласования, в котором неизвестным является передаточное отношение органа настройки.
Уравнение баланса можно записывать от любого конца цепи согласования. Его решение относительно передаточного отношения органа настройки и представляет собой формулу настройки.
В общем виде формула настройки выглядит следующим образом:
![]() ,
,
где i– передаточное отношение органа настройки;С– постоянная цепи согласования, зависящая от передаточных отношений ее промежуточных передач и постоянных параметров условия согласования перемещений;Z – переменные параметры условия согласования.
Для примера возьмем настройку кинематических цепей токарно-винторезного станка модели 1К62. Структура кинематических цепей данного станка представлена на рис.12, за исключением внутренней цепи поперечной подачи суппорта и цепи ускоренной продольной подачи.
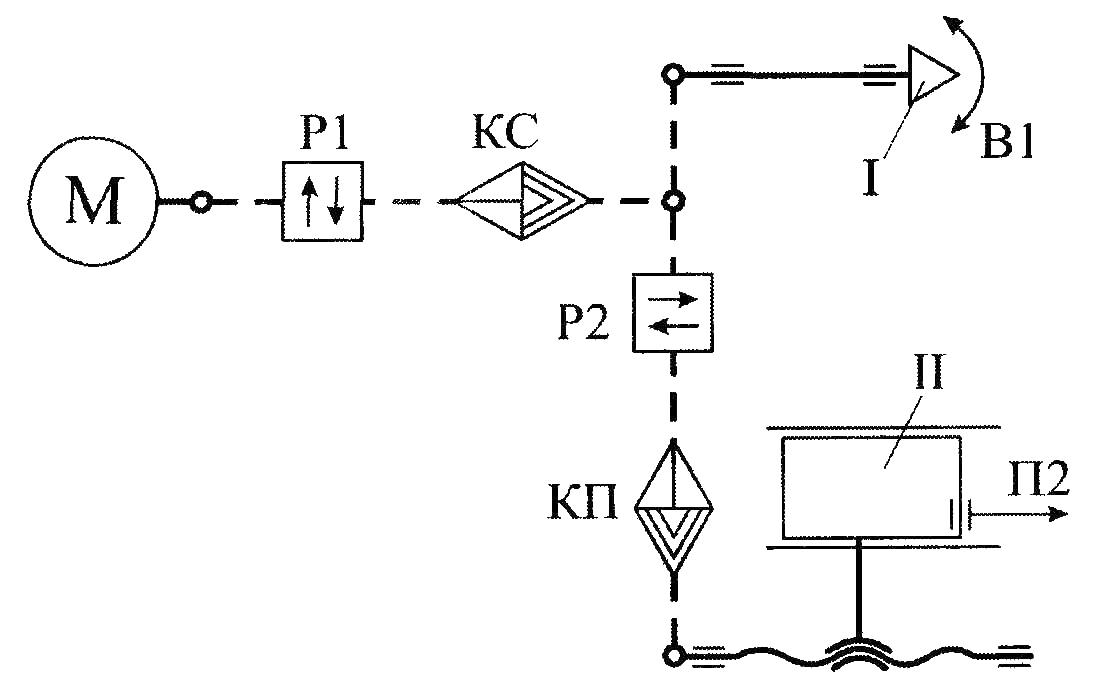
Рис.12. Схема кинематических цепей станка 1К62
Из данной схемы видно, что для настройки движения резания Ф(В1) необходимо выбрать передаточное отношение коробки скоростей (КС) станка в зависимости от частоты вращения шпинделя. Для этого составляется следующее уравнение:
![]() .
.
где nдв– частота вращения вала приводного двигателя, мин-1;iрем– передаточное отношение ременной передачи, расположенной между приводным двигателем и коробкой скоростей;iкс– передаточное отношение коробки скоростей;nшп– частота вращения шпинделя станка, мин-1.
Из этого уравнения получается необходимое нам передаточное отношение коробки скоростей
![]() .
.
В данном случае к постоянным параметрам цепи согласования относятся параметры в знаменателе правой части уравнения, переменным параметром является частота вращения шпинделя, которая может изменяться в зависимости от необходимого режима резания.
Настройка движения подачи Ф(В1П2) производится аналогичным образом. В данном случае необходимо определить передаточное отношение коробки подач (КП). В итоге получаем следующие уравнения:
![]() мм/об,
мм/об,
где S– подача на 1 оборот шпинделя;iгит– передаточное отношение паросменных колес;iкп– передаточное отношение коробки подач;m– модуль реечной шестерни, мм;z– количество зубьев реечной шестерни.
Отсюда
![]() .
.
Подобным образом можно рассчитать любую кинематическую цепь любого станка, изменяться будут только постоянные и переменные параметры цепи согласования.