

3.9.3. Исполнительные приводы металлорежущих систем с чпу
В приводах главного движения станков с ЧПУ преимущественно применяют регулируемые приводы с двигателем постоянного тока и тиристорным преобразователем напряжений. Необходимая мощность привода главного движения станка изменяется в функции частоты вращения. Так как основную нагрузку по снятию припуска в процессе обработки несет привод главного движения, то его считают работающим в режиме постоянной мощности. Поэтому по мере уменьшения скорости исполнительного органа момент нагрузки на валу возрастает и соблюдается соотношение
Рг = Мгг = const,
где Рг – мощность привода главного движения; Мг и г – момент и частота вращения на валу привода главного движения.
Для регулирования частоты вращения в режиме автоматического управления технологическим процессом требуется непрерывное управление скоростью в диапазоне
Dp = const = 1:2.
Для двигателей постоянного тока серии 2П этот диапазон
Dp = const = 1:4.
Однако при обработке заготовок различного размера с помощью многих различных инструментов (многоцелевые станки) значение частоты вращения необходимо иметь в диапазоне
Dp = const = 1:50.
В этом диапазоне частота вращения может изменяться ступенчато с применением дополнительной коробки скоростей.
Автоматизация переключения частот вращения в передачах осуществляется с помощью электромагнитных фрикционных муфт. Этот принцип использован в автоматических коробках скоростей типа АКС. Унифицированные коробки типа АКС позволяют реализовать все операции управления главным приводом: пуск, торможение, реверсирование, регулирование частоты вращения. Они обеспечивают высокую скорость переходных процессов, защиту от перегрузок, удобство в работе и т.д.
К вспомогательным операциям на станках с ЧПУ относятся: реверсирование направления вращения шпинделя и его останов; установка исполнительных органов в исходное положение; обеспечение транспортирования, зажима и разжима деталей; поиск, смена, фиксация инструмента и т.д.
Приводы вспомогательных движений должны удовлетворять следующим требованиям: высокая удельная мощность, большой крутящий момент на выходе, высокая надежность, удобство в эксплуатации. В большой степени этим требованиям соответствуют гидроприводы. Гидропривод содержит следующие основные элементы: источник гидравлического потенциала; аппаратуру, регулирующую давление и расход жидкости, а также направление ее движения; гидродвигатель, осуществляющий движение исполнительного органа станка; соединительные магистрали. Основным элементом является гидродвигатель, в качестве которого применяются гидромоторы, силовые цилиндры возвратно- поступательного и возвратно-поворотного действия. Они обладают небольшими моментом инерции и моментом трогания, высоким быстродействием, широким диапазоном регулирования.
В механизмах, где не требуется высокая выходная мощность, стабильность скорости перемещения вспомогательных органов и точное позиционирование, применяют пневматические и пневмоэлектрические приводы. Эти приводы обладают простой системой управления, высокой надежностью и малой стоимостью.
Привод подач является одним из основных узлов, который определяет производительность, точность и надежность работы станка с ЧПУ.
В позиционных и контурных СЧПУ чаще всего встречаются два типа приводов. Первым и наиболее простейшим вариантом исполнительного позиционного привода подач является электрический шаговой привод. Шаговые приводы используют несиловые и силовые шаговые двигатели. При применении несилового шагового двигателя в состав привода входит гидравлический усилитель крутящего момента. Выходной вал силового шагового двигателя непосредственно соединяется с ходовым винтом или редуктором механизма подачи.
Структура шагового привода с несиловым шаговым двигателем представлена на рис.69. От программо-задающего устройства импульсы в унитарном коде поступают на вход электронного коммутатора. Под действием очередного входного импульса электронный коммутатор изменяет свое состояние через усилитель мощности, переключает фазы шагового двигателя, поворачивая его ротор на угловой шаг.

Рис.69. Структурная схема с шаговым приводом
Основные характеристики шаговых двигателей: частота приемистости (мгновенный перепад частот управления, обрабатываемый шаговым двигателем без потери шага), максимальная частота управления в режиме плавного разгона и максимальный крутящий момент. Для несиловых шаговых двигателей частота приемистости не более 1000 Гц, максимальная частота равна 16...18 кГц, максимальный крутящий момент достигает 0,3 Нм. В последнее время наблюдается устойчивая тенденция к отказу от применения несиловых и применению силовых шаговых двигателей. Большое преимущество силового шагового двигателя – отсутствие динамических погрешностей, вносимых системой усиления крутящего момента.
Преимущества шагового привода: простота конструкции и экономичность, отсутствие устройств обратной связи для измерения положения и скорости исполнительного органа, задание программы в унитарном коде. Недостатки шагового привода: ограничение по скорости, связанное с пропуском импульсов; необходимость плавного разгона и торможения; ошибки в отработке программы в случае потери импульсов. Система управления, в случае применения шагового привода, получается разомкнутой со всеми присущими ей недостатками.
В контурных СЧПУ, как правило, применяют следящий электропривод (рис.70). Управляющие импульсы от интерполятора УЧПУ поступают в цифроаналоговый преобразователь, в котором импульсный сигнал преобразуется в аналоговый. Число управляющих импульсов, поступающих от интерполятора, определяет перемещение, а их частота – скорость перемещения исполнительного органа. Заданный сигнал 3 поступает на элемент сравнения, который сравнивает 3 с сигналом , характеризующим фактическое положение исполнительного органа. На основе сравнения сигналов 3 и вырабатывается сигнал рассогласования , поступающий в контур формирователя ошибки перемещения. Регулируемый привод отрабатывает сигнал рассогласования в сторону его уменьшения. Сигнал рассогласования поступает в предварительный усилитель системы импульсно-фазового управления.
Для
увеличения диапазона регулирования
привод охватывается обратной связью
по частоте вращения .
Для этого на входном валу двигателя
устанавливается тахогенератор, напряжение
которого пропорционально угловой
скорости выходного вала. Разность между
заданным напряжением и напряжением от
тахогенератора усиливается и подается
в тиристорный преобразователь. Система
импульсно-фазового управления преобразует
выходное усиленное напряжение в
прямоугольные импульсы, фаза которых
изменяется пропорционально входному
воздействию. Эти импульсы управляют
тиристорами. Напряжение на входе
тиристорного преобразователя
пропорционально рассогласованию
и производной от рассогласования
![]() .
Тиристорный преобразователь управляет
двигателем, который обеспечивает через
механизм подачи движение исполнительного
органа с заданной скоростью и на заданное
расстояние. Основной характеристикой
следящего электропривода является
погрешность положения
= 3
– .
.
Тиристорный преобразователь управляет
двигателем, который обеспечивает через
механизм подачи движение исполнительного
органа с заданной скоростью и на заданное
расстояние. Основной характеристикой
следящего электропривода является
погрешность положения
= 3
– .
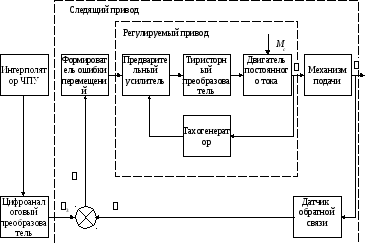
Рис.70. Структурная схема следящего электропривода в контурных СЧПУ


 В
приводах станков с ЧПУ нашли применение
малоинерционные двигатели с гладким
якорем. В этих двигателях уменьшение
момента инерции достигнуто за счет
резкого увеличения активной длины якоря
и уменьшения его диаметра. В качестве
общего недостатка, который характерен
для всех типов малоинерционных двигателей,
следует отметить необходимость
специального динамического согласования
двигателя с механической системой
станка.
В
приводах станков с ЧПУ нашли применение
малоинерционные двигатели с гладким
якорем. В этих двигателях уменьшение
момента инерции достигнуто за счет
резкого увеличения активной длины якоря
и уменьшения его диаметра. В качестве
общего недостатка, который характерен
для всех типов малоинерционных двигателей,
следует отметить необходимость
специального динамического согласования
двигателя с механической системой
станка.
Увеличение динамического момента при неизменном моменте инерции достигается в высокомоментных двигателях. Высокомоментные двигатели постоянного тока выполняют с возбуждением от постоянных магнитов. Применение постоянных магнитов позволяет увеличить КПД на 10...15% и уменьшить размеры двигателя по сравнению с электромагнитным возбуждением. Постоянные магниты выполняются на основе ферритов, имеющих высокие значения напряженности магнитного поля и удельного сопротивления.
Отечественные тиристорные приводы с высокомоментными двигателями постоянного тока ПВБ-100, ПВБ-112 и ПВБ-132 выпускают с мощностью 0,75...5,5 кВт. Они обеспечивают диапазон регулирования 1:10000 при номинальном значении частоты вращения n = 1000 мин-1. Этот двигатель устанавливается непосредственно на ходовой винт механизма подачи станка. Привод подач с высокомоментным двигателем позволяет выполнить разгон перемещаемого исполнительного органа до максимальной скорости за весьма малое время (например, разгон до скорости 10 м/мин осуществляется примерно за 0,25 с).
В станках с ЧПУ в качестве привода подач находит применение гидропривод. Гидроприводы имеют довольно высокий КПД, равный 0,85...0,95, что выше КПД электрических приводов. Существуют две основные схемы питания гидродвигателей в гидропередачах станков с ЧПУ: от гидронасоса с регулируемой производительностью – объемное управление и от дроссельного устройства – дроссельное управление. В настоящее время в приводах подач станков с ЧПУ применяются гидроприводы объемного регулирования, которые в сравнении с гидроприводом дроссельного управления имеют более высокий КПД, меньший нагрев рабочей жидкости, обеспечивают более плавный реверс и торможение гидродвигателя.