

Маслов А.В., Гордеев А.В., Батраков Ю.Г. - Геодезия
.pdfÑ ó ù í î ñ ò ü ê î ð ð å ë ÿ ö è î í í î é î á ð à á î ò ê è. Ïîíÿ-
тие «корреляционная обработка» относится главным образ˝ом к широкополосным сигналам, т. е. сигналам, обладающим широким спектром. К таким сигналам относятся, в частности, и синусо˝и- дальный сигнал несущей, модулированный кодовой (псевдосл˝у-
чайной) последовательностью, и сам кодовый модулирующий сигнал, представляющий собой последовательность прямоу˝голь-
ных импульсов различной длины.
Если имеется два одинаковых, но сдвинутых по времени на не˝-
которую величину τ широкополосного сигнала S1(t) è S2(t + τ), òî
вводят понятие корреляционной функции этих сигналов K1, 2 = < S1(t)S2(t + τ) >,
где угловые скобки означают усреднение за большой период˝ времени — такой, который больше периода самой низкочастотной составляющ˝ей спектра сигналов S1 è S2. Эта корреляционная функция имеет один резко выраженный ˝максимум при τ = 0. Следовательно, если изменять задержку τ до получения максимума корреляционной функции, то тем самым можно измерить эту заде˝ржку.
Этот принцип положен в основу кодовых измерений времени распространения. В приемнике формируется точно такой же п˝сев-
дослучайный код. Этот код (называемый местным) и приходящи˝й
от спутника сигнал подаются на коррелятор (рис. 19.10), обеспе˝-
чивающий переворот фазы приходящего несущего колебания˝ на
180° в моменты смены символов местного кода. Тогда при измер˝е- нии задержки местного кода относительно кода, содержащег˝ося в
спутниковом сигнале, до момента, когда эта задержка стане˝т рав-
ной нулю, на выходе коррелятора возникает немодулированн˝ое
колебание несущей частоты, так как при совпадении кодов к˝
180°-ным сдвигам фазы несущей от спутникового кода будут в те же моменты добавляться 180°-ные сдвиги от местного кода, а зн˝а-
чит, общий сдвиг фазы несущей составит 360° (нулевой), т. е. фа-˝
зовая манипуляция снимается. При этом мощность сигнала на˝ вы-
ходе фильтра резко возрастает (что соответствует максиму˝му корреляционной функции). Таким образом, появление немодулированного колебания служит индикатором совпадения спутников˝ой и местной кодовых последовательностей, которые были сдвинуты во времени. Эту временну′ю задержку и измеряют при сдвиге местного
кода относительно спутникового до их совпадения. В результате корреляционная обработка позволяет при большой длитель˝ности интервала осреднения выделить полезный сигнал из шумов, п˝ревышающих его по мощности в сотни раз. Следует, однако, иметь˝
в виду, что при обработке по грубому С/А-коду можно изменить
Рис. 19.10. К принципу кодовых измерений с корреляционной обработкой сигнала:
1 — коррелятор; 2 — фильтр; 3 — местный генератор ПСП
531
задержку только в пределах временной длительности этого˝ кода
(его периода повторения ÒÏÑÏ), которая составляет 1 мс. Полное же время распространения сигнала τ значительно больше одной миллисекунды. Его можно представить в виде
τ = N · 1 ìñ + Δτ,
ãäå N — неизвестное число миллисекунд во времени τ; Δτ — доля временнó го интервала, которую можно измерить (0 < Δτ < ÒÑÏÑ = 1 ìñ).
То есть возникает проблема разрешения неоднозначности, как и при фазовых измерениях. Но здесь ее решают без особых затр˝уд-
нений. Дело в том, что за 1 мс радиоволна проходит 300 км. Числ˝о миллисекунд во времени распространения сигнала равно чи˝слу
300-километровых отрезков в расстоянии до спутника, которое˝ равно примерно 20 000 км. Для верного определения числа N ðàñ-
стояние до спутника надо знать с ошибкой не более 150 км. Его˝
нетрудно вычислить по координатам спутника и приближенным координатам наземной станции. В результате можно получит˝ьN, а затем найти полное время τ.
Определив τ и умножив его на скорость света в вакууме, полу-
чают последовательность, описываемую формулой (19.5),
Ð = ρ + ñ tàòì + ñ t÷.
Задержку сигнала в атмосфере tàòì обычно подразделяют на
задержку в тропосфере и задержку в ионосфере.
Î ï ð å ä å ë å í è å ê î î ð ä è í à ò è ç ê î ä î â û õ è ç ì å -
р е н и й. Запишем полученную из кодовых измерений псевдодальность в виде
Ð = ρ + ò+ è + ñ t÷, |
(19.6) |
ãäå ò è è — суммарные «вклады» тропосферы и ионосферы, выраженны˝е в линейной мере, обусловленные как задержками, так и рефракци˝онным удлинением траектории. Эти величины могут быть определены по известн˝ым формулам, основанным на использовании стандартных моделей (при использ˝овании двухчастотных приемников величина è может быть практически исключена). Поэтому эти величины в формуле (19.6) можно считать известными. Неизвестн˝ыми остаютсяρ è t÷.
Дальность ρ связана с геоцентрическими координатами приемника X, Y, Z и спутника XS, YS, ZS известным из аналитической геометрии соотношением
ρ = [(X |
S |
– X)2 + (Y – Y)2 |
+ (Z – Z)2]1/2, |
(19.7) |
|
S |
S |
|
аналогичным формуле (19.1).
Координаты спутника XS, YS, ZS получаются по эфемеридным данным, которые с помощью сектора управления и контроля з˝а- кладывают в навигационное сообщение, транслируемое со сп˝утника в приемник, т. е. XS, YS, ZS являются известными величина-
532

ми. Поэтому уравнение (19.6) фактически содержит четыре неиз-˝
вестных: три координаты приемника (определяемого пункта)˝X, Y, Z и разность показаний часов τ÷. Åñëè одновременно измерить псевдодальности до четырех спутников, то получим систему˝ четырех уравнений вида (19.6) с четырьмя неизвестными, из решения˝
которой и находят искомые координаты пункта X, Y, Z1.
Ä è ô ô å ð å í ö è à ë ü í û é ñ ï î ñ î á ê î ä î â û õ è ç ì å -
р е н и й. В дифференциальном способе в отличие от автономного измерения одновременно выполняют двумя приемниками. Оди˝н
приемник — неподвижный (Referenc), ставят на пункте с извест-
ными координатами, т. е. на базовой станции или опорной. Дру˝- гой приемник — мобильный (Rover), размещают над определяемым пунктом. Поскольку координаты базовой станции извест˝ны,
то их можно использовать для сравнения с определяемыми и ˝на-
ходить на этой основе поправки для мобильной станции. Сущ˝е- ствует несколько способов коррекции. При кодовых способа˝хпоправки вводят как в псевдодальности, так и в координаты.
Âодном случае измеренные на базовой станции псевдодальн˝о-
сти сравнивают с расстояниями, вычисленными по известным˝ координатам спутника и станции, и определяют их разности. Эт˝и
разности, называемые дифференциальными поправками, передают на мобильную станцию при помощи дополнительной радиосвя˝зи
(радиомодема). Мобильная станция, получив дифференциальн˝ые поправки, исправляет свои измеренные псевдодальности и п˝о ним
вычисляет координаты.
Âдругом случае базовая станция вычисляет разности между˝ известными координатами и определенными в автономном режиме,
èими исправляют координаты на мобильной станции. При это˝м
важно, чтобы оба приемника измеряли псевдодальности до од˝них
èтех же спутников. Поправки можно вводить и в режиме постобработки — обработке после измерений.
Дифференциальный метод позволяет повысить точность код˝о- вых измерений в диапазоне от нескольких метров до несколь˝ких дециметров. В разных странах существует целая сеть базовы˝х станций, передающих дифференциальные поправки для заинтерес˝о- ванных пользователей (бесплатно или на коммерческой осно˝ве).
Первая в России сеть базовых станций, названная «Спутнико˝-
вая система межевания земель (ССМЗ)», создана в 2003 г. для
Москвы и Московской области (см. подробно в разд. 19.14).
19.6. ФАЗОВЫЕ ИЗМЕРЕНИЯ
Рассмотрим теперь фазовый режим измерений на несущей час˝- тоте, применяемый в геодезических работах. В этом случае и˝змеряют не время распространения сигнала от спутника до прие˝мни-
1 Процедура исключения разности показаний углов Δτ÷ будет рассмотрена далее.
533
ка, а сдвиг фазы колебаний несущей частоты (излучаемой спу˝тни-
ком) за этот промежуток времени. Однако здесь, так же как и в˝ наземных фазовых дальномерах, возникает проблема разреш˝ения неоднозначности, обусловленная тем, что приемником измер˝яют не полный сдвиг ϕ, связанный с расстоянием от спутника до при-
емника, а лишь его дробную часть Δϕ, меньшую 2π. Измеряемый сдвиг фаз реализуется в приемнике как разность фаз между сигналом, принятым от спутника, и опорным сигналом, генерируемы˝м в приемнике. Здесь, кроме того, возникают проблемы, связанные с
разночастотностью сигналов из-за движения спутника (эффе˝кт
Доплера) и трудностью согласования начальных фаз (синфаз˝ирования) спутникового и опорного сигнала, но в данный момент˝ эти проблемы не рассматривают. Допустим, что для какого-то фик˝си-
рованного момента времени измерена дробная часть фазово˝го
сигнала Δϕ. Но для определения расстояния нужен полный фазовый сдвиг:
ϕ = 2πN + Δϕ = ωτ = 2πf (Ð/ñ), |
(19.8) |
ãäå N — неизвестное целое число; ω — циклическая частота; ω = 2πf (f — несущая частота); Ð — псевдодальность, содержащая геометрическое расстоян˝иеρ. Из формулы (19.8), имея в виду, что ñ/f = λ (длина волны в вакууме):
Ð = λN + λ(Δϕ/2π). |
(19.9) |
Это почти та же псевдодальность, что и при кодовых измерен˝и- ях, которую можно представить выражением вида (19.6), но с дву-
мя отличиями: первое, ионосферный член è будет иметь другой
знак, а второе, величина t÷, фигурирующая в формуле (19.6), будет иметь несколько другую трактовку. При кодовых измерен˝иях она отражает несинхронность хода часов спутника и приемника. При фазовых же измерениях она является причиной несинфазности (несовпадения начальных фаз) колебаний опорных генераторов
спутника и приемника, которую обозначают через δϕ. Именно на-
личие величины δϕ приводит к тому, что из фазовых измерений получаем псевдодальность. Значения t÷ è δϕ жестко связаны друг с другом (δϕ = 2πf t÷), поскольку вследствие единства эталона времени и частоты «часы» — это и есть генераторы колебан˝ий.
В литературе часто употребляют выражения «кодовая псевд˝о- дальность» и «фазовая псевдодальность», записывая их с со˝ответ-
ствующими индексами «к» и «ф» в виде:
Ðê = ρ + |
ò + è + ñ t÷; |
(19.10) |
Ðô = ρ + |
ò – è + ñ(δϕ/2πf). |
(19.11) |
Приравнивая формулы (19.10) и (19.11), определяют значение Δϕ/2π, обозначив его через Ô (измеренная величина разности фаз, выраженная в долях цикла; в наземной фазовой дальноме˝т-
534
рии ее обозначают DN): |
|
DÔ = (r/l) + (Dò/l) – (Dè/l) + (dj/2p). |
(19.12) |
Как уже упоминалось, наличие целого числа N приводит к про-
блеме разрешения неоднозначности.
Если каким-то способом определить число N, то можно полу-
чить измеренное значение фазовой псевдодальности Ðô. Однако она содержит неизвестную величину dj. Фазовые измерения с
двумя приемниками позволяют исключить эту величину, испо˝ль-
зуя метод фазовых разностей.
М е т о д ф а з о в ы х р а з н о с т е й. Для рассмотрения этого метода преобразуем формулу (19.12), исключив из нее члены
Dò/l è Dè/l, из-за влияния тропосферы и ионосферы как не имею-
щих прямого отношения к рассматриваемому методу. В резуль˝тате получим формулу, связывающую дальность до спутника r с изме-
ренной разностью фаз,
r= |
|
é |
+ |
Dj + dj |
dj ù |
(19.13) |
|
|
ê |
p |
|
ú |
|||
|
ë |
|
û |
|
|||
ãäå N — целое число фазовых циклов; Δϕ — измеренное значение разности фаз; δϕS — начальная фаза колебаний генератора спутника; δϕÐ — начальная фаза колебаний генератора приемника.
Таким образом, если при кодовых измерениях имеет значение˝
несинхронность показания часов спутника и приемника, то п˝ри фазовых измерениях — несинфазность колебаний опорных г˝енераторов спутника и приемника. Аппаратурно, т. е. путем орга˝ни-
зации каких-то дополнительных каналов связи между приемн˝и- ком и спутником, эти параметры определить невозможно. Поэ˝то-
му несинхронность определяют путем корреляционной обра˝ботки
сигнала, изложенной в разделе 19.5, а несинфазность исключаю˝т из результатов обработки путем формирования «разностей˝ измерений», описываемых далее.
Если в наземных системах счет идет медленно (единицы циклов в секунду или минуту), то в спутниковой системе приемни˝к считает тысячи циклов в секунду. В целом многозначность р˝азре-
шают способом, во многом аналогичным способу радиолога и ˝фа-
зового зонда, используемому в наземных системах. Отличие ˝заключается в том, что расстояние до спутника в начальный мо˝мент измерений с достаточной точностью неизвестно. Сюда приме˝шиваются проблемы, связанные с неопределенностью начальны˝х
фаз. Если непосредственно использовать уравнение (19.13), то н˝ет
основания округлять приближенно определенное значение N˝ до ближайшего целого числа, как это делают в дальномерах. Про˝блемы этим не ограничиваются. Следует иметь в виду, что GPS создавалась как навигационная кодовая система, изначально не п˝ред-
535

назначенная для фазовых измерений. В ней нет стройной сет˝ки
частот, специально предназначенной для разрешения много˝зна- чности. Все это свидетельствует о том, что разрешение мног˝озна- чности — самая большая проблема в спутниковых наблюден˝иях, решить которую удается путем формирования разности фаз и˝зме-
рений.
Как уже отмечалось, в геодезических фазовых измерениях уч˝а-
ствуют минимум два приемника, каждый из которых принимает˝ и регистрирует сигналы группы из нескольких спутников. Рас˝смот-
рим два элементарных случая: один приемник одновременно п˝ри-
нимает и регистрирует сигналы двух спутников (рис. 19.11, à); два приемника одновременно принимают и регистрируют сигнал˝ одного спутника (рис. 19.11, á). В первом случае программное обес-
печение формирует разность фаз сигналов от двух спутнико˝в на
одном приемнике. Во втором случае — от одного спутника на˝ двух приемниках. Эту разность фаз называют первой разностью ñïóò-
ник—спутник и приемник—приемник.
Если сформировать разность выражений вида (19.12) для ва-
рианта спутник—спутник, то в разности исключается началь˝ная фаза δϕÐ колебаний приемника. Если сформировать разность вы-
ражений того же вида для варианта приемник—приемник, то в˝ разности исключается начальная фаза δϕS колебаний спутника.
Чтобы исключить одновременно обе начальные фазы, необходимо сформировать вторую разность, которую получают из од-
новременных наблюдений двух спутников двумя приемникам˝и
(ðèñ. 19.12, à). Другими словами: вторая разность — это разность двух первых разностей. При формировании разностей фазовы˝х измерений система превращается из дальномерной в разностн˝о-
дальномерную, в результате чего «геометрия созвездия» ст˝ановит-
ся менее благоприятной. Следует подчеркнуть, что при форм˝иро-
Рис. 19.11. К понятию первая разность:
à — спутник—спутник; á — приемник—приемник
536
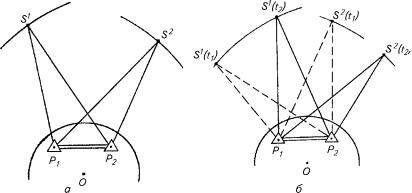
Рис. 19.12. К понятию вторая разность (à) и третья разность (á)
вании разностей выражений (19.13) образуются и разности N.
Первая разность содержит разность целых уложений длин во˝лн в расстояниях до спутника. Вторая разность содержит разнос˝ть це-
лых уложений длин волн, содержащихся в первых разностях.
Учитывая, что во второй разности исключаются начальные фазы колебаний спутника и приемника, теоретически число у˝ложений длин волн во второй разности действительно являетс˝я це-
ëûì.
Поэтому при обработке измерений округляют число уложени˝й длин волн до целого числа. Вторые разности — основа обраб˝отки
измерений, так как на базе их получают окончательные резу˝льтаты геодезических измерений. Вместе с тем нерешенной остае˝тся проблема разрешения неоднозначности, т. е. определения це˝лого цикла фазовых циклов N. По этой причине возникает необходи-
мость в использовании не только вторых, но и третьих разностей,
геометрия которых показана на рисунке 19.12, á. При образовании
третьих разностей фиксируются не абсолютные значения ра˝сстоя-
ний от приемников до спутников, а их приращения при переме˝- щении последних по своей орбите за время t = t2 – t1. Такие приращения могут быть определены по показаниям фазометриче˝ского устройства при условии непрерывного отслеживания при˝нимаемых от спутника радиосигналов. Следовательно, третьи раз˝ности позволяют решить неоднозначность путем нахождения полн˝ых значений N по их приращениям N. Однако следует иметь в виду,
что такая процедура неизбежно связана с понижением точно˝сти,
так как ухудшается геометрия наблюдений из-за того, что из˝оповерхности (см. рис. 19.1) пересекаются под острыми углами. В ре˝-
зультате чего ошибка определения вектора базы достигает˝ 1…3 м, что неприемлемо для геодезии. Вместе с тем приближенные з˝на- чения координат вектора базы, полученные по третьим разно˝стям,
537
впоследствии используют при окончательном решении по вт˝орым
разностям.
Заметим, что математические соотношения, характеризующи˝е фазовые разности спутниковых сигналов, рассмотрены в лит˝ературе.
Задачу решают параметрическим способом по методу наимен˝ь- ших квадратов, базирующемуся на составлении и решении сис˝те-
мы линейных уравнений. При этом разрешение многозначност˝и сводится к вычислению числа целых уложений длин волн N0 âî
второй разности для каждой пары пунктов и для каждой пары˝
спутников в начальный момент регистрации результатов. В у˝равниваниях в качестве неизвестных участвуют помимо коорди˝нат вектора базы еще и параметры многозначности N0. Отсюда видна
разница в разрешении многозначности наземных и спутнико˝вых
измерений.
Если при работе с наземным дальномером число уложений
äëèí âîëí N определяют непосредственно в процессе наблюдений, то при работе со спутниковой аппаратурой многозначность разрешают только после постобработки в камеральных условиях. Разрешение многозначности выполняют с помощью программного обе˝с-
печения в следующем порядке.
Используя эфемеридную информацию и приближенные коор-
динаты вектора базы, вычисляют параметры многозначности˝ ′
которые содержат ошибки и не являются целыми числами, как˝ это должно быть. Округляют параметры многозначности до ближа˝й-
ших целых чисел, получая тем самым набор параметров много˝- значности N0, которые пока не являются вероятнейшими. Получе-
ние вероятнейших значений обеспечивает дальнейшая проц˝едура. Используя набор целочисленных параметров многозначност˝и, вы-
числяют новые координаты вектора базы. Они также ошибочны˝,
так как ошибочны значения параметров многозначности. Одн˝ако на этом этапе достигают соответствия между параметрами м˝ногозначности (полученными разностями координат) и каталожн˝ыми координатами исходных пунктов. Далее наступает этап скан˝ирования, в результате которого компьютер последовательно и˝зменяет (увеличивает или уменьшает) на 1, 2, … значения параметров˝ многозначности, получая каждый раз новые решения для вект˝ора
базы. Число комбинаций и решений огромно. Одновременно на˝
основе статистического анализа компьютер оценивает вер˝оят-
ность v каждого из полученных решений. Он выстраивает реше-
ния в ряд по вероятности: наиболее вероятному решению при˝писывает вероятность v1, наиболее вероятному из оставшихся — ве-
роятность v2 и т. д. Завершающий этап — вычисление отношения — ratio = v1/v2. Если ratio близко к единице, т. е. решения примерно равновероятны, то многозначность не разрешилас˝ь и наблюдения на данной базе следует повторить при более бла˝гоприятной геометрии наблюдений и большей длительности се˝ссии.
538
При благоприятных условиях наблюдений случается, что ratio
близко к сотне. В этом случае операторы уверены в успехе на˝блюдений, хотя окончательное решение принимают, проанализир˝овав невязки замкнутых фигур, в соответствии с равенствами:
ΣÕ = 0; Σ Y = 0; Σ Z = 0.
19.7.ОСНОВНЫЕ ИСТОЧНИКИ ОШИБОК СПУТНИКОВЫХ НАБЛЮДЕНИЙ
Ошибки исходных данных, т. е. координат спутников, обусловлены неточностью знания эфемерид спутников на момент наблю˝дений. Эта неточность эфемерид вызвана, в свою очередь, ошибк˝а- ми измерения параметров орбит спутников на станциях назе˝много комплекса управления и ошибками прогноза движения спутн˝иков из-за невозможности точного и полного учета всех возмущаю˝щих сил (гравитационного поля Земли, масс Луны и Солнца и др.). При использовании доступных для всех эфемерид ошибку коо˝р- динат спутника оценивают величиной порядка 10…20 м. Так как координаты спутника являются исходными для вычисления к˝оординат наземных пунктов, то при абсолютном методе определе˝ния последние не могут быть получены с меньшей ошибкой. При от˝- носительных же методах (геодезическом режиме) ошибки в ко˝ординатах спутника практически не скажутся на точности опр˝еделения разности координат наземных пунктов. Это объясняется˝ тем, что при небольшом расстоянии между приемниками по сравне˝- нию с расстоянием от земной поверхности до спутника неточ˝- ность координат спутника «внесет» в координаты обоих при˝емни-
ков практически одинаковую ошибку, которая будет исключе˝на в
разности координат.
З а д е р ж к и с и г н а л а в а т м о с ф е р е. Атмосферу раз-
деляют на три области: тропосферу, стратосферу и ионосферу.
Ê тропосфере относится нижний слой от поверхности Земли до
10…15 êì. Стратосфера — это слой в интервале от 10…15 до
50…60 км. Выше лежит ионосфера, верхняя граница которой про-
стирается до 1000…10 000 км.
Тропосфера и стратосфера — это неионизированные слои в˝оз-
духа, поэтому закономерности распространения радиоволн˝ в этих
слоях считают одинаковыми, а задержку сигнала в них прост˝о на-
зывают тропосферной задержкой.
В ионосфере газ ионизирован и содержит большое количеств˝о
свободных электронов, поэтому для радиоволн она является˝диспергирующей средой — в ней показатель преломления ï (а следова-
тельно, и скорость распространения v = ñ/ï) зависит от частоты
сигнала.
539
Обе задержки сигнала в атмосфере (в тропосфере и ионосфер˝е)
вычисляют по формуле
= |
|
ò |
(19.14) |
|
ãäå ñ — скорость света в вакууме; L — толщина слоя атмосферы; ï — показатель преломления (берется соответственно для тропосферы или и˝оносферы);ï = ï(õ).
З а д е р ж к а в т р о п о с ф е р е. В тропосфере вместо по-
казателя преломления ï используют индекс преломления N, ñâÿ-
занный с показателем соотношением N = (n – 1)106. Òàê, åñëè ï = 1,000 295, òî N = 295. С использованием индекса преломления формула (19.14) применительно к тропосфере получает вид
=ò
ãäå L1 — верхняя граница тропосферы.
Функция N(x) под знаком интеграла — это закон распределения индекса преломления вдоль трассы, который аппроксими˝ру-
þò моделью тропосферы, т. е. зависимостью индекса преломления от высоты слоя тропосферы.
Для учета наклона трассы используют выведенные теоретич˝е- ские зависимости индекса N(x) для зенитного расстояния z íà-
блюдаемого объекта. В GPS, в частности, применяют модель
Хопфилда.
Тропосферная задержка, выраженная в линейной размерност˝и
(т. е. величина ñDtòðîï), лежит в диапазоне от примерно 2,4 м при z = 0 (спутник в зените) до 10 м и более при z = 80°. Ïðè z > 80°,
т. е. когда угол возвышения над горизонтом меньше 10°, наблюде-
ния не проводят. Существующие тропосферные модели позвол˝я-
ют наиболее полно учесть задержки сигнала в атмосфере при˝ дифференциальных и относительных измерениях при длине базы˝ до 10...15 км. В этом случае атмосферные условия для сигналов, при˝- ходящих от спутника на оба приемника, считают практически˝ одинаковыми и остаточное влияние тропосферы дает погреш˝- ность в несколько сантиметров.
З а д е р ж к а в и о н о с ф е р е. Так как ионосфера для ра-
диоволн является диспергирующей средой, в таких средах ск˝о- рость распространения сигнала теряет свою однозначност˝ь, а поэтому возникает необходимость различать две скорости: фазовую è групповую.
При амплитудной модуляции гармонического колебания час˝-
òîòû f возникает спектр шириной f = 2F, ãäå F — частота модуля-
540