

Маслов А.В., Гордеев А.В., Батраков Ю.Г. - Геодезия
.pdfРис. 19.2. Созвездие спутников GPS (показано 18 спутников)
дальнейшем для краткости будем называть «глобальная сис˝тема»,
принципиально изменяет существующую технологию геодези˝ческих работ. По сравнению с последней она имеет следующие пр˝е-
имущества:
результаты получаются в системе общего земного эллипсои˝да; обеспечивается полная автоматизация измерений и обрабо˝тки
результатов;
исключается необходимость располагать пункты под услов˝ием обеспечения взаимной видимости между ними;
представляется возможным выполнять наблюдения в любую погоду, как в дневное, так и в ночное время;
выбирать пункты можно, исходя из требований съемки, в непосредственной близости к району работ, без учета конфигу˝рации
геодезической сети;
выполнять полевые работы можно с помощью аппаратуры, не требующей персонала высокой квалификации;
время наблюдений на пункте, как правило, не превышает 1…2 ч, а когда не требуется высокая точность измерений, може˝т быть уменьшено до 1…2 мин;
представляется возможность высокоточного определения к˝оординат центров проектирования при аэро- и космической съем˝ке; одновременная видимость нескольких спутников позволяет˝ исключать основные источники погрешностей в спутниковых н˝а- блюдениях, в результате чего достижима точность определе˝ния
относительных координат 1 · 10–6 и более, что означает возможность конкуренции с наземными методами измерений.
521
19.2. ПРИНЦИП ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ПРИЕМНИКА ДО СПУТНИКА. ПСЕВДОДАЛЬНОСТЬ
Принцип измерения расстояния от приемника до спутника
аналогичен принципу измерения линий наземными свето- и ра˝- диодальномерами, изложенному в главе 13. Основной измеряем˝ой
величиной в этих дальномерах является время τ, затрачиваемое сигналом на прохождение удвоенного расстояния (в прямом ˝и об-
ратном направлениях). Если скорость распространения тако˝го
сигнала ñ известна, то измеряемое расстояние определяют по формуле
= |
τ |
(19.2) |
|
Âэтом методе, называемом двусторонним, время излучения и
приема сигнала регистрируют по одним и тем же часам, поэто˝му проблемы синхронизации часов не возникает.
Âспутниковых технологиях находят применение односторонние
(беззапросные) методы дальномерных измерений, основная о˝со-
бенность которых состоит в том, что передающее устройство˝ раз-
мещают на спутнике, а приемное — на наземном пункте. При этом сигнал проходит измеряемое расстояние только в одно˝м на-
правлении — от спутника до приемника. Если в этом случае ˝мо-
мент излучения и момент приема сигнала зафиксированы точ˝но
синхронизированными часами, расположенными на спутнике˝ и
на наземном пункте, то измеряемое расстояние может быть о˝пределено по формуле, аналогичной (19.2),
ρ = ñτ, |
(19.3) |
ãäå τ — время прохождения сигналом расстояния от приемника д˝о спутника.
Вследствие несинхронности хода часов на спутнике и в прие˝м-
нике формула (19.3) нуждается в уточнении. Пусть спутник излу˝-
чил сигнал в момент t0, а на приемник этот сигнал пришел в момент i0 + τ. Для определения интервала времени τ необходимо, чтобы моменты излучения и приема сигналов были зафиксиро˝ваны точно синхронизированными часами, установленными на спут-
нике и в приемнике. Тогда задача может быть решена следующ˝им
образом. Сигнал спутника каждые несколько секунд передае˝твременну′ю метку, в которой записан момент ее ухода со спутни-
ка, определенный по часам спутника. Приемник захватывает
сигнал спутника, считывает временну′ ю метку и фиксирует момент
ее прихода по своим часам. Разность между моментами ухода˝ метки со спутника и прихода ее на антенну приемника (т. е. сдви˝г
522

Рис. 19.3. Сдвиг кода спутника относительно кода приемника:
1 — приемник; 2 — спутник
кода спутника относительно кода приемника) представляет˝ собой
искомый интервал времени τ (рис. 19.3), подлежащий измерению
(более подробно эта процедура описана в разделе «Кодовые изме-
рения»).
Еще раз подчеркнем, что для этой цели часы на спутнике и в приемнике должны идти абсолютно синхронно. На самом деле
этого не наблюдается. Поэтому между показаниями этих часо˝в в
каждый момент времени имеет место ненулевая разность — ˝t÷.
Эта величина искажает результаты определения дальности˝. По
этой причине полученную изложенным методом дальность, ка˝к уже упоминалось ранее, называют псевдодальностью.
Для установления связи псевдодальности Ð с геометрической дальностью ρ обратимся к формуле (19.3). Подставив в нее вместо
истинного времени τ фактически измеряемое τ + |
t÷, получим вы- |
ражение для псевдодальности |
|
Ð = ñ (τ + t÷) = ρ + ñ t÷, |
(19.4) |
ãäå ñ — скорость распространения сигнала в вакууме; ρ = ñτ — геометрическая дальность; ñ t÷ — некоторая линейная величина, отличающая истинную дал˝ьность от псевдодальности.
Вследствие того что сигнал от спутника проходит путь не в˝ вакууме, а в атмосфере, возникает задержка сигнала в атмосфере tàòì = τ – τâàê (здесь τâàê — время распространения сигнала в ваку-
уме) и, как следствие, атмосферная поправка ñ tàòì.
С учетом атмосферной поправки ñ tàòì и величины ñ t÷ оконча-
тельно выражение для псевдодальности будет иметь вид
Ð = ρ + ñ tàòì + ñ t÷. |
(19.5) |
523
19.3.СОСТАВ ГЛОБАЛЬНОЙ СИСТЕМЫ. РЕЖИМ РАБОТЫ СИСТЕМЫ
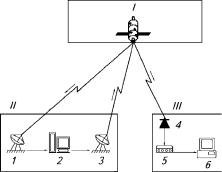
Глобальная система состоит из трех секторов: космическог˝о, наземного контроля и управления и потребителя (рис. 19.4).
К о с м и ч е с к и й с е к т о р. Он представляет собой созвез-
дие из 24 спутников, обращающихся вокруг Земли в шести орби-˝ тальных плоскостях (по четыре спутника на каждой орбите (с˝м.
рис. 19.2). Такое число спутников обеспечивает видимость над˝ горизонтом по меньшей мере четырех спутников (минимально н˝е-
обходимое число для определения координат наземного при˝емника) в любой точке Земли в любое время суток.
Точки пересечения орбиты с небесным экватором размещены˝ равномерно по экватору, т. е. отстоят друг от друга на 60°. Орб˝иты
наклонены относительно плоскости экватора на 55°. Период о˝бращения спутника вокруг Земли равен примерно 12 ч, следовате˝ль-
но, спутники делают два оборота вокруг Земли в сутки. Такой˝ пе-
риод обращения обеспечивает прохождение каждого спутни˝ка над областью, контролируемой наземными системами управлени˝я США, по крайней мере раз в сутки. Постоянный контроль орбит˝
спутников с Земли обеспечивает необходимую точность сис˝темы.
Любое замеченное отклонение движения спутника от теорет˝иче- ской орбиты измеряется и передается на борт ИСЗ в память к˝ом-
пьютера.
Процедура определения координат пунктов основана на ис-
пользовании кодовой информации и высокоточных временны˝′ х сигналов, передаваемых спутниками. Каждый спутник GPS пере-
дает сигналы на двух несущих частотах: L1 = 1575,42 МГц (длина
волны 19 см) и L2 = 1227,60 МГц (длина волны 24 см). Спутниковые сигналы названных несущих частот L-диапазона
модулированы двумя кодами: точным Р-кодом с частотой
10,23 МГц (длина волны 30 м) и грубым С/А-кодом с частотой
1,023 МГц (длина волны 300 м), а также навигационным сообще-
Рис. 19.4. Общая структура глобальных спутниковых систем:
I — космический сектор; II — сектор управления и контроля; III — сектор пользователя; 1 — станция слежения; 2 — центр управления; 3 — станция загрузки; 4 — приемная антенна; 5 — спутниковый приемник; 6 — комплекс
обработки измерений
524
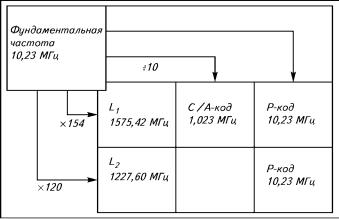
Рис. 19.5. Принцип формирования спутниковых сигналов
нием, содержащим среди другой информации координаты спут˝- ников как функции времени — «Бортовые эфемериды». Более˝ подробно об этом сказано в разделах 19.4…19.6. Структура спутни˝-
ковых сигналов показана на рисунке 19.5.
Точный Р-код обеспечивает выполнение спутниковых опреде˝- лений с дециметровой точностью, а грубый С/А-код — с метро˝вой
точностью.
Наибольшую точность получают при определении относи-
тельных координат между двумя и более приемниками дифференциальным методом. Трехмерный вектор между двумя станциями,
на которых были организованы одновременные сбор и обрабо˝тка данных GPS этим методом, называют базовой линией или просто
базой.
Все спутниковые системы обеспечивают определение коорд˝и- нат приемника (базы между парой приемников) в общеземной геоцентрической системе координат. Для того чтобы связать определяемые при помощи GPS координаты с местной системой координат, должны быть установлены параметры преобразования˝ одной системы в другую. Подробно это рассмотрено далее.
С е к т о р к о н т р о л я и у п р а в л е н и я. Основная
функция сектора — проведение наблюдений ИСЗ с автоматиче-
ских станций в целях уточнения орбит, прогноза движения И˝СЗ на определенный интервал времени и закладки данных прогн˝оза в
виде эфемерид в бортовую память ИСЗ для последующего расп˝ространения эфемеридной информации среди пользователей с˝истемы в составе навигационных сообщений.
С е к т о р п о л ь з о в а т е л я. Он состоит из приемника и вычислительного блока. Приемник принимает сигналы, посту˝па-
525

|
ющие от спутника, и переда- |
|||||
|
åò |
èõ |
â |
вычислительный |
||
|
блок. Вычислительный блок |
|||||
|
обрабатывает данные |
èçìå- |
||||
|
рений и навигационных со- |
|||||
|
общений, |
поступивших из |
||||
|
приемника, т. е. выполняет |
|||||
|
òàê |
называемую |
постобра- |
|||
|
ботку. |
|
|
|
|
|
|
Ð å æ è ì ð à á î ò û ñ è ñ - |
|||||
|
ò å ì. |
Глобальные |
системы |
|||
|
могут работать в двух основ- |
|||||
Рис. 19.6. К понятиям кодовые (псевдодаль- |
íûõ |
режимах, получивших |
||||
номерные) (à) и фазовые (геодезические) (á) |
название кодовых и фазовых |
|||||
измерения: |
измерений |
(ðèñ. 19.6). |
Ïðè |
|||
1 — пункт; 2 — геоцентр |
кодовых |
измерениях |
èçìå- |
|||
|
ряют время распространения |
|||||
кодово-модулированного сигнала от спутника до приемника˝, а
при фазовых — сдвиг фазы колебаний несущей частоты за вр˝емя распространения. Режим кодовых измерений называют навигационным, абсолютными определениями, а режим фазовых измерений — геодезическим, относительными определениями. Такую
терминологию используют потому, что кодовые измерения дают меньшую точность, приемлемую главным образом для ре-˝
шения задач навигации, и при этом обеспечивают непосредственное получение самих координат (абсолютных значений˝).
Фазовые же измерения позволяют получить не сами координа˝- ты, а разности (приращения) одноименных координат двух
(или более) точек, в которых установлены одновременно рабо˝-
тающие приемники.
Иногда выделяют третий режим — интегральный доплеровский
счет, который позволяет получить скорость изменения расс˝тояния
до спутника и фиксировать моменты последовательных поло˝же-
ний спутника.
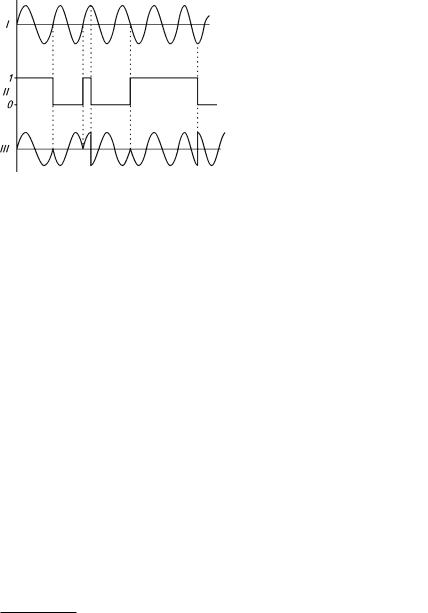
19.4. СТРУКТУРА СИГНАЛА СПУТНИКА
Спутниковый сигнал представляет собой электромагнитные колебания на двух несущих частотах L1 è L2, подвергнутых особому
виду фазовой модуляции — фазовой манипуляции, суть кото˝рой
состоит в изменении фазу несущей на 180° в определенные мо-
менты. Эти моменты задаются так называемыми дальномерным˝и
кодами — определенными последовательностями нулей и ед˝иниц. Переброска фазы происходит в моменты смены в кодах 0 на 1 ил˝и
1 íà 0 (ðèñ. 19.7).
Используют два кода: один для «грубых», другой для «точных˝» измерений. Грубым кодом модулируют несущую L1, а точным —
526
обе несущих L1 è L2. Грубый код называют С/А-кодом
(Coaase |
Acquisition |
— |
легко |
|
||
обнаруживаемый, |
общедос- |
|
||||
тупный), а точный — Р-кодом |
|
|||||
(Precision — точный). С/А-код |
|
|||||
предназначен |
äëÿ |
âñåõ |
|
|||
пользователей. Р-код вначале |
|
|||||
предназначался |
â |
основном |
|
|||
äëÿ |
американских |
военных. |
|
|||
Сейчас, |
однако, |
доступ к |
|
|||
нему имеют практически все |
|
|||||
пользователи приемников. |
|
|||||
С помощью кодов измеря- |
Рис. 19.7. Фазовая манипуляция под дей- |
|||||
þò |
расстояния |
|
|
′ |
||
временным |
ствием кодового сигнала: |
|||||
методом путем корреляцион- |
I — немодулированная несущая; II — кодовый |
|||||
ной обработки сигнала, о чем |
сигнал; III — фазоманипулированная несущая |
|||||
будет сказано в разделе. Помимо измерения расстояний с помощью кодов передают со спу˝т-
ника другую информацию: метки времени, данные об эфемеридах1 спутника, различные поправки, альманах (данные о местопо-
ложении каждого спутника и состоянии его «здоровья») и др˝. Вся эта информация, образующая навигационное сообщение, также пре-
образуется в двоичный код (последовательность нулей и единиц), которым дополнительно модулируются обе несущие частоты˝. Та-
ким образом, сигнал каждого спутника состоит из двух несу˝щих колебаний различных частот, модулированных по фазе как да˝ль-
номерными кодами, так и навигационным сообщением. Частота˝
следования символов навигационного сообщения составляе˝т 50 Гц, т. е. 50 бит/с (один символ — 0 или 1 — содержит один бит
информации).
Принцип формирования спутникового сигнала показан на ри˝- сунке 19.5. Высокостабильный опорный кварцевый генератор, стабилизированный при помощи атомных эталонов частоты, г˝енерирует колебания с частотой 10,23 МГц, из которых образуются˝ все остальные частоты — несущие, частоты следования сим˝волов С/А- и Р-кодов (тактовые частоты) и символов навигационного˝
сообщения.
Дальномерным кодом называют последовательность сигналов, которые могут находиться в двух различных состояниях, усл˝овно им приписывают значения (символы) 0 и 1. Эти состояния прину-˝
дительно чередуются таким образом, что в их смене невозмо˝жно
1Эфемериды — набор координат, определяющих положение сп˝утников на орбите в различные моменты времени.
527
заметить какой-либо закономерности, т. е. чередование выг˝лядит случайным, но через определенные интервалы времени оно пе˝- риодически повторяется с точностью до каждого символа. По˝- добные последовательности называют псевдослучайными è îáðà-
çóþò псевдослучайные коды. На спутнике и в приемнике генерируются совершенно одинаковые коды, которые сдвинуты по врем˝е- ни. Период повторения псевдослучайных последовательнос˝тей
(длительность кода) существенно различен для «грубого» и˝ «точ- ного» кодов. Так, С/А-код повторяется каждую миллисекунду, а˝
длительность Р-кода составляет 266,4 сут. Короткая длительно˝сть С/А-кода позволяет легко захватить сигнал спутника на час˝тотеL1.
Значительно труднее захватить спутниковый сигнал на несущей L2, которая модулирована только Р-кодом. Его большая длитель˝-
ность выбрана разработчиками специально, с целью затрудн˝ить
доступ к нему для несанкционированных пользователей. Общ˝ая длительность Р-кода разбита на недельные отрезки, распред˝е- ленные по всем спутникам системы, т. е. Р-код каждого спутни˝ка
меняется через неделю. Разработчиками GPS было предусмотре˝-
но введение режима избирательного доступа (СА), при котором в целях снижения точности намеренно вносят искажения в даль-
номерный код и загрубляют эфемеридную информацию в навигационном сообщении (в настоящее время режим SA отменен).
Принцип построения генератора дальномерного кода состоит в формировании так называемых сдвиговых регистров с обрат˝ными
связями, представляющих собой набор последовательно соединенных бинарных ячеек — элементов с двумя устойчивыми сост˝ояния-
ми. Одному из этих состояний приписывают символ 0, другому — 1. Подачей электрического импульса на ячейку эти состояния˝
можно переключать, а подачей импульса на общей для всех яч˝еек шине — передавать символ на следующую ячейку, т. е. продв˝игать
его на один разряд к выходу. Введя с выхода последней ячейк˝и на
вход первой цепь обратной связи с включенным в нее суммат˝о-
ром, получим генератор псевдослучайной последовательно˝сти
(ÏÑÏ).
Поясним сказанное на простом примере трехразрядного рег˝и- стра (т. е. содержащего три ячейки), схема которого показан˝а на рисунке 19.8. Предположим, что в начальном состоянии во всех трех разрядах записаны единицы. По общей шине подаются та˝к- товые импульсы с частотой fèìï. На первом такте, т. е. при поступлении первого тактового импульса, на сумматор подается ед˝иница с выхода первого разряда и единица с выхода третьего разр˝яда.
Сумматор осуществляет сложение по модулю 2:
1 + 1 = 0
1 + 0 = 1
0 + 1 = 1
0 = 0 = 0.
528
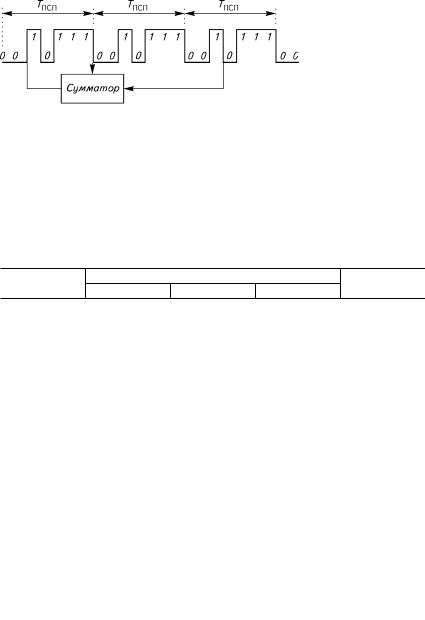
Рис. 19.8. Трехразрядный сдвиговый регистр с обратной связью˝
Следовательно, сложение двух единиц даст 0, который запишется в первый разряд. Одновременно единица, находящаяся ˝в
первом разряде, подвинется во второй, единица из второго р˝азряда — в третий, а единица из третьего разряда — на выход. А˝нало-
гично будет происходить процесс при поступлении 2-го, 3-го и т. д. тактовых импульсов (табл. 19.1)
19.1. Формирование псевдослучайной последовательности
0 |
1 |
1 |
1 |
|
1 |
0 |
1 |
1 |
1 |
2 |
1 |
0 |
1 |
11 |
3 |
0 |
1 |
0 |
111 |
4 |
0 |
0 |
1 |
0111 |
5 |
1 |
0 |
0 |
10111 |
6 |
1 |
1 |
0 |
010111 |
7 |
1 |
1 |
1 |
0010111 |
На седьмом такте во всех разрядах регистра окажутся те же˝ числа, что и на нулевом такте, и далее полученная кодовая после˝довательность 0010111 будет периодически повторяться с периодом
ÒÏÑÏ (ðèñ. 19.9).
Если на рисунке 19.8 подключить сумматор к выходу не первого, а второго разряда, то последовательность чередования ˝нулей и
единиц изменится, но число символов в длительности кода о˝ста-
нется прежним (семь). Оно зависит только от числа разрядов˝.
Как уже отмечалось, каждый спутник имеет свой С/А-код. Они
различаются только порядком чередования нулей и единиц п˝ри
Рис. 19.9. Кодовая последовательность из 7 символов
529
сохранении общей длительности. Это достигнуто тем, что на˝ сум-
матор подаются сигналы от различных пар ячеек регистра. Генератор Р-кода устроен сложнее — в нем вместо двух ис-
пользуется четыре 10-разрядных регистра. Особенностью работы по Р-коду длительностью 7 сут является то, что для вхождения в
синхронизм (для захвата спутника) требуется знать точное˝ время по часам приемника, что дает возможность приближенно пред˝-
сказать сдвиг местной (генерируемой в приемнике) ПСП отно˝сительно ПСП, приходящей от спутника.
Навигационное сообщение содержит 1500 бит и занимает 30 с.
Оно разделено на 5 субкадров по 300 бит, каждый из которых передается в течение 6 с. Субкадр состоит из 10 слов по 30 бит.
Каждый субкадр начинается с телеметрического слова TLM,
содержащего сообщение о состоянии спутника. Вторым слово˝м
каждого субкадра является ключевое слово HOW, содержащее метку времени, записанную в виде 29-разрядного числа в двоич˝-
íîì êîäå.
Остальная информация распределяется по субкадрам следу˝ю-
щим образом.
Субкадр 1 содержит данные о поправке часов спутника относи-
тельно системного времени GPST и коэффициенты, заложенные в модель задержки радиосигнала при прохождении его через и˝оно-
сферу. Информация об ионосфере предназначена для абонент˝ов, использующих только одночастотные приемники (принимающ˝ие
только частоту L1).
Субкадры 2 и 3 содержат эфемериды транслирующего спутника, полученные по данным наземных станций слежения. Они корре˝к- тируются каждый час и позволяют вычислить текущие коорди˝на-
ты спутника на момент измерения псевдодальности. Эфемери˝ды
включают в себя элементы кеплеровской орбиты на опорный м˝о-
мент и поправки к ним, позволяющие прогнозировать элемент˝ы орбиты внутри периода действия эфемерид.
Субкадр 4 зарезервирован для передачи служебной информации.
Субкадр 5 содержит альманах, т. е. приближенные эфемериды всех спутников системы и данные об их работоспособности. ˝Альманах используют для планирования измерений.
19.5. КОДОВЫЕ ИЗМЕРЕНИЯ
При кодовых измерениях, как уже отмечалось ранее, измеряе˝-
мой величиной является время распространения сигнала τ от спутника до приемника, в которое входит как задержка в атмосфе˝ре, так и совокупное отклонение часов спутника и приемника от˝ системного времени. Это время измеряют путем корреляционно˝й обработки кодовых сигналов.
530