

Скобцовы Моделирование и тестирование
.pdfВ седьмом разделе исследуются методы построения проверяющих тестов для последовательностных схем. Рассматриваются два подхода – структурный и функциональный. В структурном подходе методы генерации тестов с использованием многозначных алфавитов для комбинационных схем распространяются на схемы с памятью.
Исследована кратная стратегия наблюдения выходных сигналов.
Функциональный подход основан на теории экспериментов с конечными автоматами, где широко используются идентифицирующие последовательности, такие как установочная, диагностическая,
синхронизирующая и уникальная. Разработаны методы построения идентифицирующих последовательностей с использованием многозначных алфавитов. При написании раздела использованы работы
[16-23].
В восьмом разделе исследован новый эволюционный подход к построению тестов для цифровых систем. Изложены основы генетических алгоритмов, разработаны проблемно-ориентированные генетические операторы кроссинговера и мутации для построения тестов комбинационных и последовательностных схем. Исследованы различные целевые (фитнесс) функции, которые основаны на логическом моделировании исправных и неисправных схем. Изложены методы построения тестовых последовательностей для микропроцессорных систем с использованием генетических алгоритмов, эволюционной стратегии и генетического программирования. Материал раздела основан на работах
[24-34].
В девятом разделе изложены основы проектирования программных систем логического моделирования и генерации тестов на примере системы АСМИД. Описаны архитектура, функциональные возможности системы и основные структуры данных. При написании раздела использованы работы [35-38].
11
|
СПИСОК УСЛОВНЫХ ОБОЗНАЧЕНИЙ |
HDL |
- Hardware Description Languages |
MIMD |
- multiple-instruction, multiple-data |
SIMD |
- single-instruction, multiple-data |
SOC |
- System on Chip (система на кристалле) |
SON |
- stuck-on (постоянно замкнут) |
SOP |
- stuck-open (постоянно открыт) |
VHDL |
- Very high speed integrated circuits Hardware Description |
|
Languages |
АСМИД |
- автоматизированная система моделирования и диагностики |
АЛУ |
- арифметико-логическое устройство |
БИС |
- большие интегральные схемы |
ДУ |
- дискретное устройство |
ГА |
- генетические алгоритмы |
ГП |
- генетическое программирование |
ИС |
- интегральные схемы |
КА |
- конечный автомат |
КМОП |
- комплементарная МОП (схема) |
МОП |
- металл-окисел-полупроводник (технология) |
МП |
- микропроцессор |
ОБС |
- очередь будущих событий |
САПР |
- система автоматизации проектирования |
СБИС |
- сверхбольшие интегральные схемы |
СГ |
- системный граф |
ТТЛ |
- транзисторно-транзисторная логика |
ЦС |
- цифровые системы |
ЭСЛ |
- логика с эмитерными связями |
ЯРП |
- языки регистровых передач |
12
1.МОДЕЛИ ЦИФРОВЫХ УСТРОЙСТВ
1.1Уровни и области моделирования
При автоматизации проектирования и диагностирования дискретных устройств (ДУ) широкое применение находят системы моделирования.
Для представления устройств они требуют соответствующих математических моделей. При проектировании ДУ следует различать модели устройств и их спецификации [39]. Спецификации описывают устройство в терминах получаемых результатов проектирования, таких как схемы, временные диаграммы и т.п. Модели используются в процедурах проектирования устройств при моделировании в данной области (domain),
на данном уровне представления для проверки соответствия заданным спецификациям. Они также применяются для установления соответствия между различными уровнями и областями проектирования.
|
Системный уровень |
|
|
ЯРП уровень |
|
Поведенческая |
|
Структурная |
|
|
|
область |
Логический уровень |
область |
|
||
|
Схемный уровень |
|
Физическая область
Рис.1.1 Уровни абстракции
13
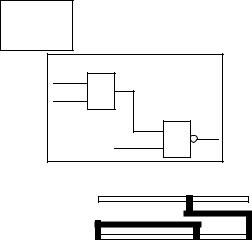
Для каждой из областей – физической, структурной и поведенческой различают различные уровни: схемный, логический, языков регистровых передач (ЯРП) и системный. При этом в поведенческой области дается функциональное представление ДУ, в структурной области описываются блоки архитектуры ДУ, физическая область отражает реальный кристалл
(chip). Например, для логического уровня эти три области показаны на
рис.1.2.
Поведенческий
уровень
Структурный
уровень
a = b c z = !(a d)
b
c
a
d & z
Физический
уровень
b c
Рис.1.2 Области представления схемы на логическом уровне
С другой стороны на рис.1.3 показаны различные уровни для структурной области. В табл.1.1 представлены различные уровни проектирования ДУ для каждой области. Следует отметить, что ДУ на одном и том же уровне в данной области может быть описано различными способами. Например, ДУ на логическом уровне в поведенческой области может быть описано с помощью булевых выражений, таблиц, языка программирования, языка описания аппаратуры.
14
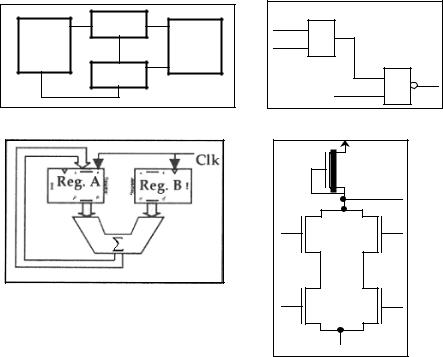
Системный уровень |
Логический уровень |
|
b |
|
|
|
|
|
|
|
|
|
c |
|
a |
|
|
|
|
z |
|
|
|
d |
& |
|
Уровень регистров |
Схемный уровень |
|
||
|
|
|
Z |
|
|
A |
|
C |
|
|
B |
|
D |
|
Рис.1.3 Уровни абстракции структурной области
Таблица 1.1
|
|
Область |
|
|
|
|
|
Уровень |
Поведенческая |
Структурная |
Физическая |
|
|
|
|
Системный |
Системные |
Блоки |
Кристалл |
|
спецификации |
|
|
|
|
|
|
ЯРП |
ЯРП спецификации |
Регистры |
Макро ячейки |
|
|
|
|
Логический |
Булевы функции |
Логические |
Стандартные |
|
|
вентили |
ячейки |
|
|
|
|
Схемный |
Дифференциальные |
Транзисторы |
Маски |
|
уравнения |
|
|
|
|
|
|
Данный раздел содержит различные формы представления моделей,
которые используются при моделировании и тестировании ДУ. Прежде всего мы рассмотрим вопросы моделирования на уровне логических
15
элементов или логическом моделировании ДУ. При этом, как правило,
элементы, составляющие ДУ, описываются с помощью логических уравнений (булевых функций), которые отражают логику их функционирования. Кроме этого исследуются функциональные модели ДУ на уровне регистровых передач.
Объектом наших исследований являются ДУ, которые делятся на два класса [1,2]: комбинационные и последовательностные устройства. ДУ называется комбинационным, или ДУ без памяти, если значения его выходных сигналов однозначно определяются только значениями входных сигналов. Последовательностным, или ДУ с памятью, называется устройство, у которого значения выходных сигналов в данный момент времени зависят от значений входных сигналов в текущий момент и от внутреннего состояния объекта в предыдущий момент времени,
определяемого значениями сигналов на линиях обратных связей. При построении моделей ДУ мы рассмотрим три подхода: функциональный,
структурный и представление ДУ языками описания аппаратуры (hardware
design languages - HDL).
1.2 Функциональные модели
Суть функционального подхода заключается в абстрагировании от внутренней организации устройства и рассмотрении только его логики функционирования. Как правило, под ДУ подразумеваются устройства,
перерабатывающие двоичную информацию.
1.2.1 Модели комбинационных схем
В качестве функциональной модели комбинационных устройств,
чаще всего, используют систему булевых функций:
z1 = f1(x1,...xn )
…
zm = fm (x1,...xn ) ,
16
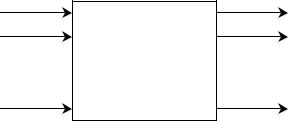
где X=(x1,...,xn) - входные, Z=(z1,...,zm) - выходные переменные,
принимающие двоичные значения B2={0,1}. Данная система булевых функций описывает комбинационное ДУ, которое имеет n входов, m
выходов и представлено на рис. 1.4.
x1
x2
xn
z1
z2
zm
Рис.1.4 Комбинационное ДУ
Здесь каждая булева функция fi (x1,..., xn ) - отображение B2n → B2 .
Простейшим способом представления булевой функции является таблица истинности. Например, в табл.1.2 приведена таблица истинности для булевой функции трех переменных.
Кроме этих таблиц часто используются также табличные модели в виде так называемых «примитивных» (простых) кубов. Эти кубы в сжатом виде фактически представляют ту же самую информацию. Один
«примитивный» куб объединяет несколько «соседних» строк таблицы истинности, на которых булева функция принимает одно и тоже значение.
Под «соседними» здесь понимаются строки, отличающиеся значением одного (или более) бита. В отличие от таблиц истинности такие кубы используют не двоичный алфавит B2={0,1}, а троичный алфавит
E3={0,1,x}, где символ х представляет неопределенное значение (0 или 1)
переменной. В табл.1.3 представлена табличная модель в виде
«примитивных» кубов той же булевой функции (табл.1.2).
17

Таблица 1.2 |
|
|
Таблица 1.3 |
|
||||
|
|
|
|
|
|
|
|
|
X1 |
X2 |
X3 |
F |
|
|
|
|
|
|
X1 |
X2 |
X3 |
F |
||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
1 |
|
|
|
|
|
|
X |
1 |
0 |
0 |
||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
0 |
0 |
1 |
1 |
|
|
|
|
|
|
1 |
1 |
X |
0 |
||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
0 |
1 |
0 |
0 |
|
|
|
|
|
|
X |
0 |
X |
1 |
||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
0 |
1 |
1 |
1 |
|
|
|
|
|
|
0 |
X |
1 |
1 |
||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
1 |
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
1 |
0 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В табл. 1.3 первая строка («примитивный» куб – х110) объединяет третью
(0100) и седьмую (1100) строки исходной таблицы истинности. Отметим,
что третья стока (куб х0х1) объединяет четыре строки таблицы истинности, имеющих всевозможные значения переменных х1 и х3 и одно и тоже значение булевой функции f=1. Фактически, «примитивный» куб соответствует простой импликанте [40].
1.2.2 Модели последовательностных схем
В качестве функциональной модели последовательностных устройств используется абстрактный конечный автомат, являющийся совокупностью пяти объектов A=(Y,X,Z,δ,λ), где Y, X, Z – конечные множества состояний, входных и выходных сигналов соответственно;
δ:Y×X→Y - функция переходов, определяющая следующее состояние автомата; λ:Y×X→Z - функция выхода, определяющая выходной сигнал.
Различают два типа автомата:
автомат Мили Y (t + 1) = δ (Y (t), X (t))
Z(t + 1) = λ (Y (t), X (t)) ;
и автомат Мура Y (t + 1) = δ (Y (t), X (t))
18
Z(t +1) = λ (Y (t)) .
Например, табл. 1.4 представляет конечный автомат Мили с одним входом – х, одним выходом – z и четырьмя состояниями. Здесь на пересечении строки (текущего состояния) и столбца (входного сигнала)
приводятся следующее состояние и выходной сигнал автомата.
Таблица 1.4
|
|
X |
|
S |
|
|
|
0 |
|
1 |
|
|
|
|
|
1 |
2,1 |
|
3,0 |
|
|
|
|
2 |
2,1 |
|
4,0 |
|
|
|
|
3 |
1,0 |
|
4,0 |
|
|
|
|
4 |
3,1 |
|
2,0 |
|
|
|
|
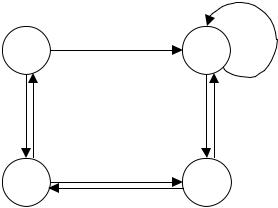
Кроме приведенной табличной формы автомат также часто представляется графом переходов и выходов. Для примера на рис.1.5
показан граф переходов –выходов автомата, представленного табл.1.4.
|
|
0/1 |
0/1 |
|
|
|
|
|
1 |
|
2 |
1/0 |
0/0 |
1/0 |
1/0 |
|
|
1/0 |
|
|
3 |
|
4 |
|
|
0/1 |
|
Рис.1.5 Граф переходов – выходов автомата табл.1.4
Следует отметить, что в этой форме представления неявно предполагается, что функционирование автомата рассматривается в
19
дискретном времени, принимающем целые неотрицательные значения t=0,1,2... Такие автоматы называются синхронными.
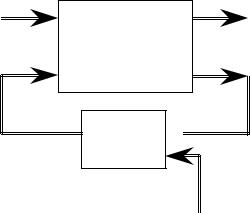
Синхронное последовательностное ДУ имеет каноническую форму представления, приведенную на рис.1.6. Эта автоматная модель позволяет представить последовательностное устройство в виде комбинационного блока и блока памяти, которые соединены линиями обратной связи
Y=(y1,...,yk).
X
Y
Комбинационная схема С
Триггеры 
Z
~
Y
F/Fs
Синхроимпульс
CLOCK
Рис.1.6 Модель схемы с памятью
Здесь каждое состояние в таблице автомата соответствует комбинации переменных состояния - y. Синхронизация неявно реализуется в виде дополнительного входа – clock. Таким образом события (изменение состояния и выходного сигнала ) инициируются импульсами на входе синхронизации. Состояние схемы запоминается в синхронизируемых триггерах (flip-flop - FF) и изменяется при поступлении импульсов на соответствующий вход. На рис.1.7 представлены три используемые на практике типа синхронизируемых триггеров: JK-триггер, Т-триггер и D-
триггер (задержка). В общем случае синхронные ДУ могут иметь несколько входов синхронизации.
20