

7. Общий признак эквивалентности двух систем сил (критерий эквивалентности)
Теорема.Для того, чтобы две системы силбыли эквивалентны, необходимо и достаточно, чтобы у этих систем были геометрически равны соответственно главные векторы и главные моменты относительно одного и того же полюса.
Доказательство.
Необходимость.
Дано:
![]() .
.
Следует доказать, что у этих систем сил равны главные векторы и главные моменты относительно одного и того же полюса, то есть что
![]() ,
, ![]() .
.
Доказательство:
Системы сил
![]() и
и![]() эквивалентны, следовательно, одна из
другой могут быть получены с помощью
элементарных операций. Но элементарные
операции не изменяют главный вектор и
главный момент системы сил – второе
(геометрическое) свойство элементарных
операций, поэтому
эквивалентны, следовательно, одна из
другой могут быть получены с помощью
элементарных операций. Но элементарные
операции не изменяют главный вектор и
главный момент системы сил – второе
(геометрическое) свойство элементарных
операций, поэтому![]() ,
,![]() .
.
Достаточность.
Дано:
две системы сил
![]() и
и![]() ,
главные векторы и главные моменты
которых равны, то есть
,
главные векторы и главные моменты
которых равны, то есть![]() ,
,![]() .
.
Доказать,
что системы
![]() и
и![]() эквивалентны.
эквивалентны.
Д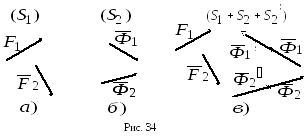 оказательство:
Не ограничиваясь в общности, проводим
доказательство в предположении, что
каждая из систем
оказательство:
Не ограничиваясь в общности, проводим
доказательство в предположении, что
каждая из систем![]() и
и![]() состоит из двух сил, то есть пусть даны
системы сил
состоит из двух сил, то есть пусть даны
системы сил![]() и
и![]() (рис 34а). В силу основной леммы статики
системы сил
(рис 34а). В силу основной леммы статики
системы сил![]() и
и![]() ,
содержащие произвольное число сил
всегда при помощи элементарных операций
могут быть приведены к двум силам, при
этом главные векторы и главные моменты
этих систем сил не изменяются.
,
содержащие произвольное число сил
всегда при помощи элементарных операций
могут быть приведены к двум силам, при
этом главные векторы и главные моменты
этих систем сил не изменяются.
Рассмотрим
дополнительную систему
![]() ,
силы которой пряморотивоположны силам
системы
,
силы которой пряморотивоположны силам
системы![]() :
:
![]() ,
, ![]() .
.
Тогда
![]() ,
,![]() .
.
Системы
сил
![]() (рис. 34а) и
(рис. 34а) и![]() (рис. 34в) эквивалентны:
(рис. 34в) эквивалентны:
![]() ,
,
так
как система
![]() может быть получена из системы
может быть получена из системы![]() отбрасыванием прямопротивоположных
сил
отбрасыванием прямопротивоположных
сил![]() и
и![]() .
.
Рассмотрим
систему
![]() ,
состоящую из сил
,
состоящую из сил![]() .
.
Главный
вектор:
![]() .
.
Главный момент:
![]() .
.
Согласно
основной лемме статики систему сил
![]() можно заменить двумя силами
можно заменить двумя силами![]() .
Тогда
.
Тогда![]() ~
~![]() .
У эквивалентных систем сил равны главные
моменты и главные вектор: поэтому
.
У эквивалентных систем сил равны главные
моменты и главные вектор: поэтому
![]() ,
,
![]() ,
,
то
есть
![]() – прямопротивоположные силы, которые
можно отбросить. Таким образом:
– прямопротивоположные силы, которые
можно отбросить. Таким образом:
![]() ,
,
или
![]() .
.
Теорема доказана.
8. Теория пар сил
8.1. Момент пары сил
 Рассмотрим
пару сил
Рассмотрим
пару сил![]() .
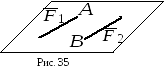
По определению – это совокупность двух
равных по величине и параллельных сил,
направленных в противоположные стороны
(рис. 35).
.
По определению – это совокупность двух
равных по величине и параллельных сил,
направленных в противоположные стороны
(рис. 35).
Плоскость, в которой лежит пара сил, называется плоскостью пары.Как уже отмечалось, главный момент пары не зависит выбора полюса и отличен от нуля.
Главный
момент пары, не зависящий от выбора
полюса, называется моментом пары.
Обозначение:![]() ,
или
,
или![]() .
.
Момент пары – это свободный вектор, перпендикулярный плоскости пары, направленный в ту сторону, откуда видно, что пара стремится вращать тело против часовой стрелки, и равный по величине произведению одной из сил пары на кратчайшее расстояние между линиями действия сил пары (плечо пары).
Д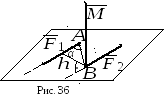 ля
доказательства этого утверждения
рассмотрим пару
ля
доказательства этого утверждения
рассмотрим пару![]() (рис. 36).
(рис. 36).
![]()
![]()
8.2. Признак эквивалентности двух пар сил
Теорема.Для эквивалентности двух пар сил необходимо и достаточно, чтобы моменты этих пар были геометрически равны.
Доказательство.
Необходимость.
Дано: две пары сил
![]() и
и![]() эквивалентны.
эквивалентны.
Следует доказать, что моменты этих пар геометрически равны:
![]() .
.
Доказательство:
Воспользуемся общим признаком
эквивалентности двух систем сил
![]() и
и![]() ,
согласно которому следует, что
,
согласно которому следует, что
![]() ,
,![]() .
.
Но главный вектор любой пары равен нулю, главный момент пары равен моменту пары:
![]() ,
,![]() .
.
Следовательно:
![]() .
.
Достаточность.
Даны
две пары сил
![]() и
и![]() ,
причем моменты этих пар геометрически
равны, то есть
,
причем моменты этих пар геометрически
равны, то есть![]() .
.
Доказать,
что пары эквивалентны:
![]() ~
~![]() .
.
Доказательство:
Главные
векторы пар равны нулю и следовательно
равны между собой
![]() .
Моменты пар равны главным моментам пар
и, по условию, равны между собой:
.
Моменты пар равны главным моментам пар
и, по условию, равны между собой:
![]() .
.
Тогда, согласно общему признаку эквивалентности двух систем сил, пары эквивалентны.