

6.4. Решение зцлп методом округления.
Метод округления – простейший метод приближенного решения ЗЦЛП. Его сущность состоит в том, что решается ослабленная задача (как задача линейного программирования) и полученное оптимальное решение ЗЛП округляется до целочисленного решения. Этот метод имеет два существенных недостатка:
в результате округления может получиться недопустимое решение;
решение, полученное в результате округления, являясь допустимым, может значительно отличаться от оптимального.
Пример 1.

Решив геометрически ослабленную задачу, получаем оптимальное решение:
![]()
Произведем округления:
x1=2; x2=0. Получим недопустимое решение - не удовлетворяется ограничение 7x1+4x2<=13 (действительно, 7*2+4*0<=13 – ложное неравенство).
2)х1=1; х2=0. Это допустимое решение. Значение целевой функции f=21*1+11*0=21, что сильно отличается от оптимального значения.
Оптимальное решение этой ЗЦЛП таково: х1=0; х2=3; fmax =33.
Метод округления можно использовать тогда, когда целевая функция малочувствительна к изменениям переменных в пределах единицы.
6.5. Метод ветвей и границ.
Этот метод точного решения ЗЦЛП чаще всего используется на практике. Он состоит в следующем.
Сначала решается ослабленная задача. Если полученное оптимальное решение целочисленное, то ЗЦЛП решена. Если же оптимальное решение ЗЛП не является целочисленным, то производим "ветвление" следующим образом. Пусть переменная хs приняла в оптимальном решении значение qs, которое не является целым. Тогда рассматриваем две ЗЦЛП. Первая получается добавлением ограничения хs <=[qs], вторая – добавлением ограничения хs >=[qs] + 1, где [qs] - целая часть числа qs .
Каждая из этих двух задач аналогичным образом может разбиться еще на две задачи т.д.
Если в результате решения какой-либо из задач получается целочисленный оптимальный план, то значение А целевой функции при этом плане играет роль "границы": если в результате решения очередной ЗЛП выяснится, что оптимальное значение целевой функции "хуже" А, то такая задача "не ветвится".
Недостаток метода ветвей и границ состоит в том, что часто оптимальное решение ЗЦЛП достигается после очень большого числа ветвлений.
Вернемся к ЗЦЛП примера 1.

Используем геометрический метод решения для отыскания оптимальных планов ослабленных задач.
Исходная ЗЦЛП №1
(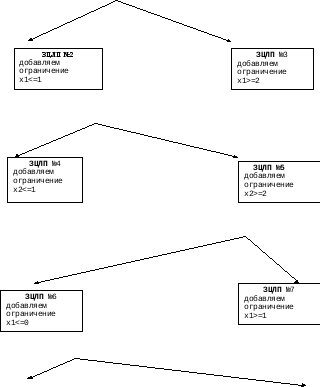 оптимальный план
оптимальный план![]() )
)
оптимальный план ОДР пуста.
![]()
Оптимальный план оптимальный план
х1=1, х2=1,fmax=32
х1=![]() ,
х2=2,fmax=37
,
х2=2,fmax=37
A=32
оптимальный план ОДР пуста
х1=0,
х2=![]() ,fmax=35,75
,fmax=35,75

Оптимальный план ОДР пуста
х1=0, х2=3, fmax=33>A
Оптимальный план ЗЦЛП: х1=0, х2=3, fmax=33.