

Lineynaya algebra i analitich_geom / Ivleva_i_kurs_lekciy_po_lineynoy_algebre_i_analiticheskoy_ge
.pdfaj bi ci bj ... cj
а это и означает линейную комбинацию строк.
Достаточность. Пусть одна из строк является линейной комбинацией других, т.е.
A B C
перепишем в виде А В С 0. |
Т.к. из чисел 1, , одно отлично от нуля, то |
последнее равенство устанавливает линейную зависимость строк.
Ранг матрицы
Запишем определение. Минором k-того порядка матрицы А называется определитель k-того порядка с элементами, лежащими на пересечении любых k строк и любых k столбцов.
Предположим, что хотя бы один элемент матрицы А отличен от 0. Тогда найдётся такое целое положительное число r, что будут выполнены два условия:
1)у матрицы А имеется минор r-того порядка, отличный от 0;
2)всякий минор (r+1)-го порядка и более (если такие есть), равен нулю.
Число r, удовлетворяющее двум требованиям, назовём рангом матрицы. А минор r-того порядка, который отличен от нуля, назовём базисным минором. Строки и столбцы, из которых состоит базисный минор, называются базисными строками и базисными столбцами.
Теорема о базисном миноре (без доказательства).
Базисные строки (или столбцы) линейно независимы. Любая строка (столбец) матрицы А является линейной комбинацией базисных строк (столбцов).
Итак, если у матрицы все миноры порядка k>r равны нулю, а среди миноров r-того порядка хотя бы один не равен нулю, то число r называется рангом матрицы.
Для того, чтобы вычислить ранг матрицы, необходимо, очевидно, вычислить все её миноры и среди них найти минор наибольшего порядка, не равный нулю. Отсюда, кстати следует, что ранг невырожденной матрицы равен порядку матрицы.
Существует, однако, более простое правило вычисления ранга матрицы. Прежде чем к нему обратиться, условимся считать элементарными следующие преобразования матрицы:
1) умножение всех элементов строки на число 0;
2)сложение элементов одной строки с элементами другой строки, умноженными на некоторое число ;
3)перемена местами строк матрицы.
Теорема без доказательства: элементарные преобразования матрицы не меняют её ранга.
Поясним всё сказанное простым примером:
|
1 |
3 |
0 |
|
1 |
1 |
|
2 |
1 |
|
|
|
|
|
|
|
|
||||||||
Дана матрица А: |
2 |
1 |
1 |
|
3 |
3 3( 2 3) 0 |
(*) |
|||||
4 |
1 |
3 |
1 |
|||||||||
|
3 |
4 |
1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
Если посчитать её определитель, то можем убедиться, что она вырождена, её det=0.
Проделаем над ней элементарные преобразования: умножим первую строку на 2 и вычтем из второй, результат запишем во вторую строку; умножим первую строку на три, вычтем из третьей строки и результат запишем в третью строку:
1 3 0 1 3 0
А 0 |
5 |
1 0 |
5 |
1 |
0 5 1 0 0 0
Мы получили матрицу. Раскрывая определитель такой матрицы последовательно сначала по первому столбцу, затем по второму и т.д., легко убедиться, что её определитель равен произведению членов, стоящих на главной диагонали. Отсюда сразу видно, что есть миноры не
3 |
0 |
равные нулю второго порядка: |
, т.е. ранг такой матрицы равен 2! |
5 1
В дальнейших лекциях мы будем рассматривать теорию решения систем линейных уравнений, где понятие ранга матрицы имеет решающее значение.
Сейчас обратим своё внимание на пример (*), где квадратная матрица была преобразована в. Этот приём лежит в основе метода решения систем линейных уравнений, называемого методом Гаусса. Вы уже знаете два метода: метод Крамера и метод с использованием обратной матрицы. Они требуют громоздких вычислений определителей. Для практических решений более удобным является способ Гаусса (или способ исключения неизвестных).
Имеем систему:
a11x1 a12x2 ... a1nxn b1a21x1 a22x2 ... a2nxn b2
an2x1 an2x2 ... annxn bn
a11 a12 a1n
Матрица этой системы .... .... ....
an1 an2 ann
Исключим из этой системы х1. Для этого умножим каждую строку на a11 ( i = 2,3,…,n) и ai1
сложим с первой строкой:
|
|
|
a11x1 a12 x2 ... a1n xn |
b1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
a22 a11 |
|
|
|
|
|
|
|
|
a11a2n |
|
|
|
|
a11 b2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b1 |
|
|
||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
a12 |
a21 |
|
|
|
x2 ... a1n |
|
a21 |
xn |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a21 |
|||||||
|
|
|
|
|
|
|
a32a11 |
|
|
|
|
|
|
|
a11b3 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
... b1 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
a12 |
a31 |
x2 |
a31 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
a11x1 a12 x2 |
a1n xn |
b1 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0x1 a22 x2 |
a2n xn |
b2 |
|
|
|
||||||||||||||||||
|
|
|
или |
|
|
|
далее, умножаем строки i = 3,…,n на |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
0x |
|
|
|
x |
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
a |
n2 |
2 |
a |
nn |
n |
b |
n |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
a |
22 / |
a |
i2 |
и т.д. Придём в итоге к системе: |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
a11x1 |
a12 x2 |
...a1n xn b1 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 x1 |
|
a |
22 x2 |
... |
a |
2n xn |
b2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 x2 |
|
... ann xn |
bn |
|
|
|||||||||||
0 x1 |
|
|
|
|||||||||||||
Отсюда x |
n |
|
|
bn |
, из предпоследней строки находим значение для x |
n 1 |
: |
|||||||||
|
|
|||||||||||||||
|
|
|
|
a |
nn |
|
|
|
|
|||||||
an 1,n 1xn 1 an 1,nxn bn 1
xn 1 bn 1 an 1,nxn /an 1,n 1
и т.д.
Первое преобразование называют прямым ходом, второе - обратным. Мы не будем останавливаться здесь на особенностях, которые могут встретиться в решении. Это тема будущих лекций. Пример:
10x 11y 5z 36 |
|
|
|
|
36 |
||
10x 11y 5z |
|||||||
|
|
0 5 y |
z |
|
6 |
||
5x 3 y 2z 15 |
|
||||||
|
|
|
|
5 10 |
|
|
|
2x y 3z 8 |
0 0 (1 |
|
|
) |
4 |
||
6 |
|||||||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
10x 11y |
5z 36 |
|
|
|
|
|||
|
|
|
10x 11 5 36 ; |
x 2 |
|||||
|
|
6 |
|
|
|
|
|||
0 5 y z |
|
|
|
|
5 y 1 6; |
y 1 |
|||
|
|
56 |
|
|
|
|
|||
|
|
|
4 5 |
|
|||||
0 0 1 |
|
|
z |
6 |
|
|
z 1 |
|
|
|
|
|
|||||||
|
|
6 |
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|||
Лекция 3.
Рассмотрим метод Гаусса (метод исключения неизвестных) с более общих позиций.
Запишем систему:
a11x1 |
a12 x2 ... a1n xn |
b1 |
|
|
|
|||||||||
|
|
|
a22 x2 ... a2n xn |
b2 |
|
|
|
|||||||
a21x1 |
|
|
|
|||||||||||
.................................... |
(*) |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
x |
1 |
a |
n2 |
x |
2 |
... a |
nn |
x |
n |
b |
|
|
|
n2 |
|
|
|
|
|
n |
|
|
|
|||||
Назовём элементарными преобразованиями |
системы уравнений |
(*) |
следующие |
|||||||||||
преобразования:
1). Умножение правой и левой части одного из уравнений на произвольное число 0. 2). Сложение одного уравнения, умноженного но некоторое , с другим уравнением. 3). Перестановка местами двух уравнений.
Две системы уравнений, полученные одна из другой путём элементарных преобразований называются равносильными, т.е. они имеют либо одни и те же решения, либо обе эти системы не имеют решения.
Запишем матрицу системы (*), добавив справа столбец свободных членов:
|
a |
a |
... |
a |
b |
|
|
11 |
12 |
|
1n |
1 |
|
D |
a21 |
a22 |
... |
a2n |
b2 |
|
|
... ... |
... ... |
... |
|||
|
|
an2 |
... |
ann |
|
|
|
an1 |
bn |
||||
Такую матрицу назовём расширенной матрицей системы линейных уравнений. Очевидно, элементарные преобразования системы линейных уравнений означают элементарные преобразования матрицы D. Эти преобразования мы проделывали ранее, вычисляя ранг матрицы. Результатом таких преобразований для матрицы D будет некоторая треугольная ( ) матрица:
a |
a |
a |
... |
a |
b |
|
|
|
11 |
12 |
13 |
... |
1n |
1 |
|
|
0 |
a |
a |
a |
b |
|
|
|
22 |
23 |
|
2n |
2 |
||
D |
0 |
0 |
a |
... |
a |
b |
|
|
|
|
33 |
|
3n |
3 |
|
... ... ... ... ... |
... |
||||||
|
0 |
0 |
0 |
... |
a |
|
|
|
b |
||||||
|
|
|
|
|
nn |
n |
|
Последняя строка матрицы соответствует, очевидно, уравнению: annxn bn ,
откуда |
x |
n |
|
bn |
. |
|
|||||
|
|
|
a |
||
|
|
|
|
nn |
|
Т.е., после привидения расширенной матрицы к виду, последнее неизвестное сразу находится. Тогда из предпоследнего уравнения найдётся хn-1:
|
|
|
|
|
||
an 1,n 1xn 1 |
an 1,nxn bn 1 |
|
||||
|
1 |
|
|
|
|
|
xn 1 an 1,n 1 |
||||||
bn 1 |
an 1,nxn |
|||||
и т.д. система легко решается.
Приведение матрицы к виду называется прямым ходом метода Гаусса, а нахождение неизвестных - обратным ходом. Рассмотрим пример решения системы линейных уравнений методом Гаусса:
3x1 4x2 x3 52x1 3x2 x3 1
2x1 x2 3x3 11
Расширенная матрица: вычитаем из первой строки вторую

|
|
|
3 |
4 1 |
5 |
1 |
1 0 |
4 |
1 |
1 0 |
4 |
|
|
||||||
|
|
|
|
2 |
3 1 |
|
|
2 |
3 1 |
|
|
0 |
1 1 |
|
|
|
|||
|
|
|
|
1 |
|
1 |
|
7 |
|
|
|||||||||
|
|
|
|
2 |
1 3 |
|
|
2 |
1 3 |
|
|
0 |
1 3 |
|
|
|
|||
|
|
|
|
11 |
|
11 |
|
3 |
|
|
|||||||||
1 |
1 |
0 |
|
4 |
|
x1 x |
2 0 4 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
x3 |
|
|
|
|
|
|
|
и |
и |
|
|
0 |
1 |
1 |
|
7 |
0 x2 |
7 |
|
|
умножим первую строку на 2 и вычтем из 2 |
|
и 3 |
|||||||
|
0 |
0 |
4 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
4 |
|
0 0 4x3 |
|
|
|
|
|
|
|
|
|||||||
сложим вторую и третью
Из последнего уравнения х3=-1.
Из второго уравнения х2 -1=-7; х2=-6.
Из первого уравнения х1 -6=4; х1=10.
Системы линейных уравнений
Рассмотрим в общем случае решение систем линейных уравнений. Дадим несколько определений.
1). Системой m уравнений с n неизвестными называется система вида:
a11x1 |
a12x2 ...a1nxn |
b1 |
|
||||
|
|
a22x2 ... a2nxn b2 |
|
||||
a21x1 |
|
||||||
.................................... |
(**) |
||||||
|
|
|
|
|
|
|
|
a |
x |
a |
m2 |
x ... a |
mn |
x b |
|
|
m2 1 |
|
2 |
n |
m |
||
2). |
Если в |
системе |
|
(**) |
все bк (k=1,...m) равны нулю, то такая система называется |
||
однородной. |
|
|
|
|
|
|
|
3). Если хотя бы один из них bк 0, то система называется неоднородной. |
|||||||
4). |
Система |
(**) называется совместной, если она имеет хотя бы одно решение, в |
|||||
противном случае она называется несовместной. |
|||||||
5). Совместная система линейных уравнений называется определённой, если она имеет |
|||||||
единственное решение и неопределённой - если решений множество. |
|||||||
Итак, начнём с помощью элементарных преобразований сводить расширенную матрицу |
|||||||
системы уравнений |
(**) к треугольному виду. Прежде всего, здесь количество уравнений не равно |
||||||
количеству неизвестных. Значит матрица прямоугольная и вообще говоря, к треугольной не сводится. Второй момент: Вспомним о ранге матрицы. Ранг матрицы равен количеству ненулевых строк в ступенчатой матрице, которая получится из исходной элементарными преобразованиями. Т.е. некоторые строки преобразованной матрицы могут остаться нулевыми. В итоге, после учёта этих моментов, можно записать самый общий вид преобразованной матрицы, который только может встретиться:
a11 |
a12 |
... |
a1r |
... |
a1n |
b1 |
|
|
|
|
0 |
a |
... |
a |
... |
a |
b' |
|
|
|
|
22 |
|
2r |
|
2n |
2 |
|
|
... |
... ... ... ... ... |
... |
(***) |
||||||
|
0 |
0 |
... |
a |
... |
a |
b' |
|
|
|
|
|
|||||||
|
|
|
rr |
|
rn |
r |
|
||
|
0 |
0 |
... |
0 |
... |
0 |
b |
|
|
|
|
... ... ... |
... |
0 |
r 1 |
|
|||
... |
0 |
|
|
||||||
или, условно нарисуем:
Обратим внимание на коэффициент br 1 . Может случиться, что это будет 0. А может и нет.
Тогда 0 br 1 0, что невозможно. Значит решений нет, т.е. система несовместна. Поэтому на
практике, сразу же после появления соотношения вида 0 h 0 можно говорить, что система не имеет решения.
Если br 1 0, то, покажем, что система имеет решение. Поскольку arr 0, то из последнего уравнения можно найти
|
|
b |
|
1 |
|
|
|
n |
|
xr |
|
r |
|
|
|
|
xr r |
r,i xi |
[ xr r fr (xr 1;...xn );] Из |
|
|
||||||||
|
|
(ar,r 1xr 1 |
ar,n xn ) или |
||||||
|
|
|
|
|
|
i r 1 |
|
||
|
|
arr |
|
arr |
|
|
|
|
предыдущего уравнения можно найти
xr 1 br 1
ar 1,r 1
и т.д. В итоге:
1 |
|
|
|
||
|
(ar 1,r 1xr 1 |
ar 1,n xn ) |
ar 1,r 1 |
|
|
|
|
n |
|
|
|
|
x1 1 1,i xi |
|
|
|
i r 1 |
|
|
n |
|
x2 2 2,i xi |
|
|
|
i r 1 |
.......................
n
xr r r,i xii r 1
[xr 1 r 1 fr 1 xr 1;...;xn ]
(****)
из этих соотношений следует, что xr+1,...,xn могут принимать произвольные значения. Эти неизвестные называются свободными, а x1,...xr - называются основными или главными. Любая совокупность свободных неизвестных и соответствующих им основных будет решением системы. Таким образом, мы доказали теорему:
Теорема Кронекера-Капелли: для того, чтобы система уравнений (**) была совместной, необходимо и достаточно, чтобы ранг матрицы этой системы и ранг расширенной матрицы были равны.Далее, предположим мы выяснили, что система уравнений совместна. Тогда возможны два случая:
1) ранг матрицы равен количеству неизвестных R=N. Это возможно, кстати, при m n.В этом случае все неизвестные главные и они равны из (****):
x1 1 x2 2 ... xn n
Это означает, что система имеет единственное решение. Система определённая.
2) r<n. В этом случае имеются свободные неизвестные, которые можно задавать произвольно. Значит система имеет бесконечное множество решений, т.е. система неопределённая!

|
|
Пример: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
x1 x2 |
|
3x3 1 |
1 1 |
3 |
|
1 |
1 1 |
3 |
|
1 |
1 1 |
3 |
|
1 |
|||||||||
|
|
|
|
||||||||||||||||||||
|
|
x2 2x3 1 |
|
2 |
|
|
|
|
4 |
|
|
|
4 |
|
|
||||||||
2x1 |
2 1 |
|
1 |
0 1 |
|
3 |
0 1 |
|
3 |
||||||||||||||
x x |
2 |
|
x |
3 |
3 |
1 1 1 |
|
3 |
0 0 |
4 |
|
4 |
0 0 |
4 |
|
4 |
|||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
x 2x |
|
3x |
|
1 |
3 |
|
1 |
0 |
|
4 |
|
||||||||||||
2 |
3 |
1 2 |
|
1 |
0 |
|
2 |
0 0 |
|
1 |
|||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
|
1 |
|
3 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
1 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
3 |
|
|
0 = -3 |
!!! |
|
|
|
|
|
|
|
|
|||||||
0 |
|
0 |
|
4 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
0 0 |
0 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Система несовместна, решений нет! |
|
|
|
|
|
|
|
|
|
|
||||||
2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
x2 x3 x4 4 |
1 |
1 1 |
1 |
|
4 |
1 |
1 |
1 |
1 |
|
4 |
||||
|
|
|||||||||||||||
|
x2 2x3 3x4 8 |
|
|
|
|
|
|
|
1 |
4 |
|
|
||||
x1 |
1 1 2 3 |
|
8 |
0 2 |
|
4 |
||||||||||
|
|
|
|
|
2 4 5 10 |
|
20 |
0 6 |
3 |
12 |
|
12 |
||||
2x1 4x2 5x3 10x4 20 |
|
|
||||||||||||||
|
|
|
|
|
|
4 1 |
6 |
|
|
|
2 |
1 |
4 |
|
|
|
2x1 4x2 x3 6x4 4 |
2 |
|
4 |
0 |
|
4 |
||||||||||
1 |
1 |
1 |
1 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
2 |
1 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
||||
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Система совместна. Положим x3=c1, x4=c2 , тогда: |
|
|
|
|
|
|
|
|||||||||||||||||
2x |
|
c 4c 4;x |
|
2 |
1 |
c 2c |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
2 |
|
|
1 |
2 |
|
2 |
|
|
2 |
1 |
|
2 |
|
|
|
1 |
|
|
3 |
|
|
|
x |
|
x |
|
c c 4;x |
|
4 c c x |
|
4 c c 2 |
c 2c 6 |
c c |
||||||||||||||
|
|
|
|
2 |
2 |
|||||||||||||||||||
|
1 |
|
|
2 |
1 |
|
2 |
|
|
1 |
|
|
1 |
2 |
|
2 |
1 |
2 |
1 |
2 |
1 |
2 |
||
Бесконечное множество решений.
Однородная система линейных
алгебраических уравнений
Матричная запись АХ=0
Расширенная матрица отличается от матрицы самой системы наличием нулевого столбца, т.е. ранг матрицы А rang A равен рангу расширенной матрицы rang B.
ra=rb
Значит, по теореме Кронеккера-Капелли, система однородных линейных уравнений всегда совместна. Одно решение очевидно: xi=0 (i=1,...,n). Это решение называется тривиальным. Следуя далее теореме Кронеккера-Капелли, придём к выводу, что если rA=n, то решение единственное - тривиальное. Если rA<n, то решений бесконечное множество. Рассуждая таким образом, мы доказали следующую теорему:
Для того, чтобы система однородных уравнений имела решения, отличные от нулевого, необходимо и достаточно, чтобы ранг матрицы системы был меньше числа неизвестных. Другими словами, если число уравнений равно числу неизвестных, то система имеет ненулевое решение тогда и только тогда, когда detA=0.
Очевидны следующие свойства ненулевого решения:
1). Если 1, 2... n - решение, то 1, 2,..., n - тоже решение. |
|
|
||||||||
2). |
Если 1 2... n |
и 1 2... n - решения, |
то |
и |
1 |
1; 2 2;...; n |
n - тоже |
|||
решения. |
|
|
|
|
|
|
|
|
|
|
В действительности этих свойств можно убедиться непосредственной подстановкой. |
||||||||||
Обозначим главные неизвестные через х1 ,...,х2. Тогда, аналогично (****): |
|
|||||||||
|
|
|
|
|
x1 |
|
|
n |
|
|
|
n |
|
|
|
|
|
1,k xk |
|
||
|
|
|
|
|
|
k r 1 |
|
|
||
x1 1,k xk |
|
|
|
. |
|
|
||||
|
|
|
|
. |
|
|
||||
|
k r 1 |
|
|
|
. |
|
|
. |
|
|
|
|
|
|
|
|
|
||||
|
n |
|
|
|
|
|
|
|||
x2 2,k xk |
|
|
|
xr |
|
|
|
|
|
|
В матричной форме: |
X |
|
|
|
r,kxk |
|
||||
|
k r 1 |
x |
|
|
xr 1 |
|
|
|||
....................... |
|
|
|
r 1 |
|
|
|
|||
|
n |
|
|
|
. |
|
|
. |
|
|
|
|
|
|
|
|
|
||||
xr |
r,k xk |
|
|
|
. |
|
|
. |
|
|
|
k r 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xn |
|
|
xn |
|
|
|
|
|
|
|
|
|
|
|
|
|
Можно записать так:
X xr 1 X1 xr 2 X2 |
... xn Xn r , |
||||||||
|
|
|
|
|
|
|
|
1,r 2 |
|
|
1,r 1 |
|
|
|
|
||||
|
|
|
|
|
2,r 2 |
||||
|
2,r 1 |
|
|
|
|
|
|
||
|
|
........ |
|
|
........ |
|
|||
|
|
|
|
|
r,r 2 |
|
|||
‹ЉЊ X1 |
|
|
|
||||||
r,r 1 |
; X |
2 |
|
,..., |
|||||
|
|
|
|
|
|
0 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
1 |
|
|
|
|
|
|
|
|
0 |
|
|
||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
1,n |
|
|
|
|
|
|
|
2,n |
|
||
|
|
|
|
|
|
...... |
|
||
Xn r |
|
|
|
|
|
r,n |
|||
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
Решения X1,X2,…,Xn-r называются фундаментальной системой решений однородной системы. Общее решение системы X является линейной комбинацией фундаментальной системой решений
X=c1X1+c2X2+...+cn-rXn-r.
Пример:
9x1 21x2 15x3 5x4 012x1 28x2 20x3 7x4 0
|
|
|
9 |
21 15 |
5 |
9 21 |
15 |
5 |
3 7 |
5 |
2 |
||
|
|
|
|
28 20 |
|
|
3 7 |
5 |
|
|
9 21 |
15 |
|
|
|
|
12 |
7 |
|
2 |
|
5 |
|||||
3 |
7 |
5 |
2 |
rA 2 |
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||
За главные неизвестные необходимо выбирать такие, при которых матрица коэффициентов не вырождена, т.е. ее определитель не равен нулю.
Возьмём за главные неизвестные х1 и х4, поскольку х1 и х2 |
3 |
7 |
det 0. |
|||||||||||||||||||||||||
0 |
0 |
|||||||||||||||||||||||||||
Тогда |
|
|
|
|
|
3x 7x |
|
5x |
|
2x |
|
0 |
|
|
||||||||||||||
|
|
|
|
|
|
1 |
0 |
|
|
2 |
|
|
|
|
|
3 |
|
4 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
x4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
||
x4 |
03;x |
1 5x3 7x |
x |
1 |
|
|
x |
2 |
|
|
|
|
|
x |
3 |
|
|
|
|
|
|
|
|
|||||
3 |
|
3 |
|
|
|
|
|
|
|
|
||||||||||||||||||
2; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Фундаментальная система решений: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
7 |
|
5 |
|
|
|
|
|
|
|
|
7 |
|
|
|
|
5 |
|
|
|||||||||
x1 |
|
|
|
x2 |
|
x3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
3 |
|
3 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
3 |
|
|
|||||||||
x2 |
1x2 0x3 |
|
|
|
X1 |
|
1 |
|
|
|
|
X2 |
0 |
|
|
|||||||||||||
x 0x 1x |
|
|
|
|
|
0 |
|
|
|
1 |
|
|
||||||||||||||||
3 |
2 |
3 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
||||||||
|
0x2 0x3 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
||||||||||||
x4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Общее решение:
X=с1X1+с2X2
Лекция 4.
Понятие вектора
Существуют величины, которые характеризуются помимо своей величины ещё и направленностью. Это скорость, ускорение, сила, смещение материальной точки и т.п. Можно абстрагироваться от конкретной физической величины и считать, что вектор - это направленный отрезок. Определение: вектор - это направленный отрезок.
Будем обозначать вектор AB . А - начало вектора, В - конец вектора.
АВ - означает длина вектора (символ модуля).
Вектор называется нулевым, если его начало и конец совпадают.
Важное свойство векторов - коллинеарность. Два вектора называются коллинеарными, если они лежат на одной прямой или на параллельных прямых.
Теперь сформулируем понятие равенства двух векторов: два вектора называются равными,
если они коллинеарны, имеют одинаковую длину и направление. Два нулевых вектора считаются равными.
|
|
|
|
|
|
|
|
|
a |
b равные |
|
a |
b неравные |
||||
|
||||||||
Из определения равенства векторов следует, что мы не различаем двух равных векторов,
имеющих разные точки приложения. Иными словами, точка приложения вектора a может быть произвольной. В соответствии с этим векторы в геометрии называются свободными.
Определим линейные операции над векторами.
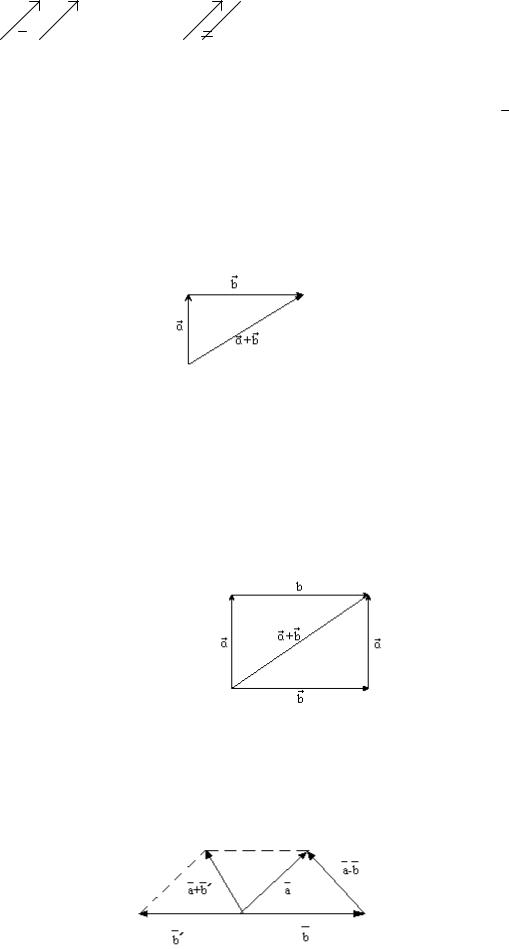
Сложение. Суммой a b двух векторов a и b называется вектор, идущий из начала вектора a в конец вектора b при условии, что начало b приложено к концу вектора a .
Геометрически это можно изобразить правилом треугольника:
Правило сложения векторов обладает теми же четырьмя свойствами, что и правило сложения вещественных чисел:
1.a b b a (переместительное свойство).
2.(a b) c a (b c) (сочетательное свойство).
3.Существует нулевой вектор, такой, что a 0 a .
4.Для каждого a существует такой a что a a 0.
Эти свойства доказываются геометрическими построениями. К примеру свойство 1:
Эти свойства позволяют оперировать с векторами так же как и с вещественными числами.
Определим разность векторов a b как сумму a b , где b - противоположный вектор