

55. Применение искусственной нейронной сети в качестве устройства управления.
Искусственная нейронная сеть (ИНС) имеет на выходе векторный сигнал. Представим, что
 .
.
Такой объект можно представить, как:
Благодаря
тому, что есть алгоритм обучения, система
делается адаптивной. Адаптация: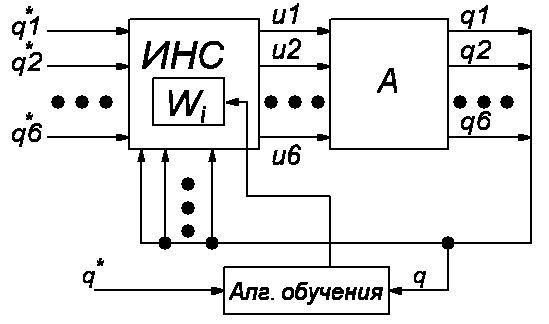
1. Сигнальная (формирует компенсирующий сигнал, который улучшает динамику системы).
2. Параметрическая (перенастраивает параметры регулятора при отклонении динамики от оптимальной)
Достоинство: ИНС может обеспечивать как сигнальную, так и параметрическую настройку.
Недостаток: Отсутствуют методы расчета количества слоев и выбора количества нейронов в слое.
Структура ИМС с применением модели:
Где
стрелки с полосой – основной контур,
без полосы – контур адаптации.
 -
идеальный случай – процесс обучения
не происходит.
-
идеальный случай – процесс обучения
не происходит.
Если ОУ изменился, то
 .
Начинается процесс обучения до тех пор,
пока
.
Начинается процесс обучения до тех пор,
пока
 ,
, - заданная величина. Для обучения может
быть применен метод обратного
распространения ошибки.
- заданная величина. Для обучения может
быть применен метод обратного
распространения ошибки.
56. Применение генетических алгоритмов для оптимизации управления электроприводами.

Область применения генетических алгоритмов: решение задач оптимизации, в частности, для обучения нейронной сети.
Рассмотрим применение генетического алгоритма для оптимизации:
где, X1*, X2* - ? (чтобы «Q» стремилось к min) Q=Q (x1,x1,…)
Обычно, для решения задач оптимизации применяют методы нелинейного программирования.
Метод генетических алгоритмов позволяет организовать движение к экстремуму.
Величина «x» должна быть задана в двоичном коде. (например в виде байта):
X=01110110
0
и 1 рассматриваются как генетический
признак, а значение, в целом , «x» - по
аналогии с хромосомой.
Следовательно,
вначале берётся исходное множество
значений:![]()
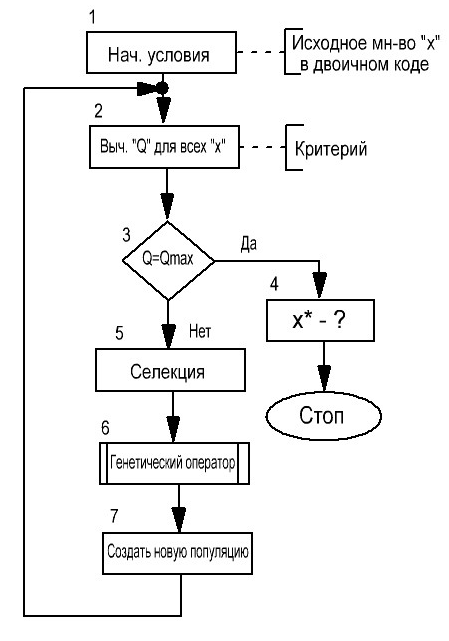
Алгоритм имеет вид:
Селекция – это выбор «X», которые дают наименьшее значение «Q».
Новая популяция – это новое поколение значений «X», которые ещё больше уменьшают «Q».
Генетический оператор - а) склеивание;
б) мутация.