

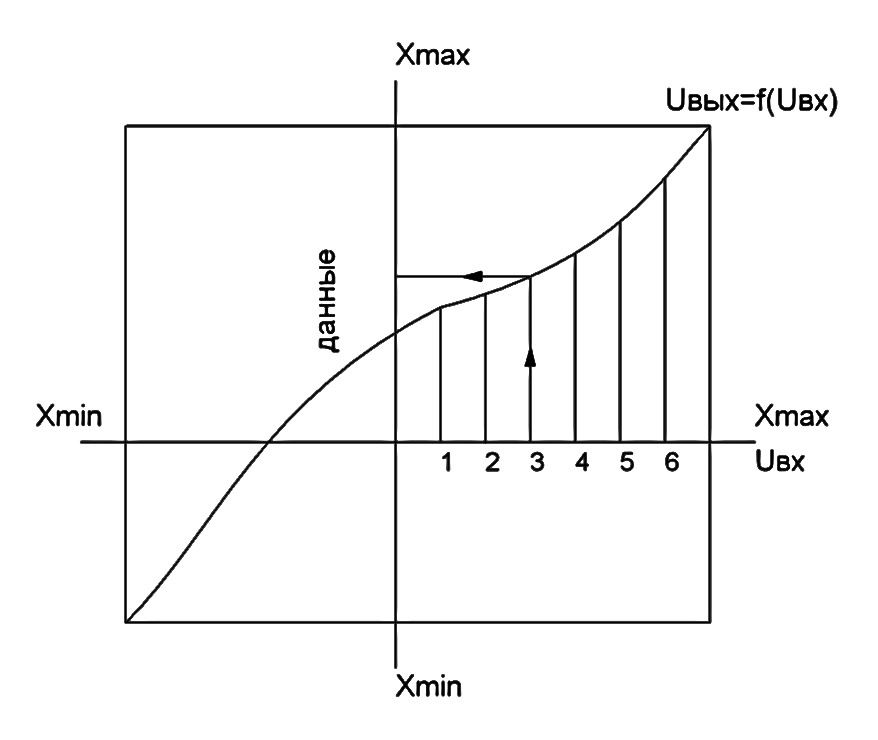
9. Применение пзу в качестве функционального преобразователя (фп).
ПЗУ можно рассматривать как ФП сигнала, представленного в двоичном коде. Входной сигнал должен быть подан на ША, после этого на выходе считывается информация, записанная по этому адресу.
Алгоритм записи в ПЗУ:
 ,
где m-
количество разрядов ША.
,
где m-
количество разрядов ША.
 -представление
в дополнительном коде.
-представление
в дополнительном коде.

10 . Организация подпрограмм и использование стековой области памяти.
Подпрограмма является самостоятельной программной единицей и может быть вызвана из различных программ. Выделение фрагмента программы в подпрограмму облегчает частое обращение к нему в процессе реализации алгоритма. Любая подпрограмма в свою очередь может обращаться к другой подпрограмме. После выполнения идет возврат на следующую после вызова подпрограммы команду.
При работе с подпрограммами используется ЗУ со стековой адресацией. Если в главной программе есть обращение к подпрограмме, то после этого данные могут быть стерты подпрограммой. Во избежание программист может сохранить полезные данные в стековой области, что позволяет беспрепятственно пользоваться регистрами. Это есть главное назначение стековой области памяти. Для стековой области отводится специальная область оперативной памяти, называемая стеком. От глубины стека зависит допустимая степень вложенности программ. Адрес вершины стека хранится в специальном регистре SP – указатель стека. Стековая адресация позволяет первым прочесть слово, которое было записано последним. Таким образом, порядок чтения из стека является обратным порядку записи в стек. Запись информации в стек называется загрузкой данных в стек, а чтение из стека – извлечение данных из стека. Стек используется при работе с подпрограммой, когда необходим возврат в программу после выполнения подпрограммы. Обращение к стеку при записи – PUSH, при чтении – РОР.
PUSHPSW
PUSH BC
PUSH DE
PUSH HL
PSW – регистровая пара A, F(аккумулятор, флаговый регистр )
РОР HL
РОР DE
РОР BC
РОР PSW
Вызов подпрограммы осуществляется командой CALLaddr, где addr означает начальный адрес подпрограммы. По этой команде содержимое программного счетчика (РС) записывается в стек, а в программный счетчик записывается начальный адрес подпрограммы из адресной части команды, что обеспечивает переход к подпрограмме. Подпрограмма обязательно заканчивается словом RETURN (возврат). Команда RETURN возвращает содержимое программного счетчика, обеспечивающее возврат в место из которого программа вызывалась.
Кроме того, в системе команд имеются команды обращения к подпрограммам и возврата с контролем условий.
11.Аппаратные средства интрфейса.
Интерфейсом называют совокупность аппаратных и программных средств для организации обмена информации. Для управления вводом и выводом информации применяются три способа:
программно управляемый
программно-аппаратный
аппаратно управляемый
1) Аппаратно управляемый ввод-вывод информации инициализируется внешним устройством с помощью запроса захват магистрали. Для этого применяется контроллерпрямого доступа памяти (КПДП, DMA). Процессор отключается от магистрали и идет обмен данных между внешним устройством и оперативной памятью напрямую. Режим прямого доступа к памяти применяется для быстрой передачи больших массивов информации.
2) Программно-аппаратный ввод-вывод информации инициализируется внешним устройством с помощью запроса на прерывание. Такой способ применяется для сохранения ресурсов, он разгружает основную программу и ускоряет реакцию на внешний сигнал. Запрос на прерывание вырабатывают внешние устройства. Такие запросы идут на специальный входы микросхем. В результате основная, или фоновая, программа прерывается, и процессор начинает процесс прерывания. Для каждого устройства своя подпрограмма. Режим прерывания возможен только в том случае, если система содержит устройство - программируемый контроллер прерывания (ПКП, PIC). Обслуживается прерывание и высоким приоритетом. Виды приоритетов: фиксированный и циклический. Фиксированный организуется схемно, и он определяется номером входа к которому подсоединено устройство:

где I0 – высший приоритет, INT – запрос на прерывание.
Если циклический, то только что обслуженное устройство приобретает низкий приоритет.