12.Програмные средства интерфейса для управления электроприводами
Программный способ ввода-вывода информации означает, что программа содержит команды опроса внешних портов для организации ввода-вывода.
Программный микроконтроллер выполнен в реальном времени, поэтому чтобы своевременно учитывать внешние события, программы должны выполняться циклически и чем короче период цикла, тем быстрее реагирует система на событие.
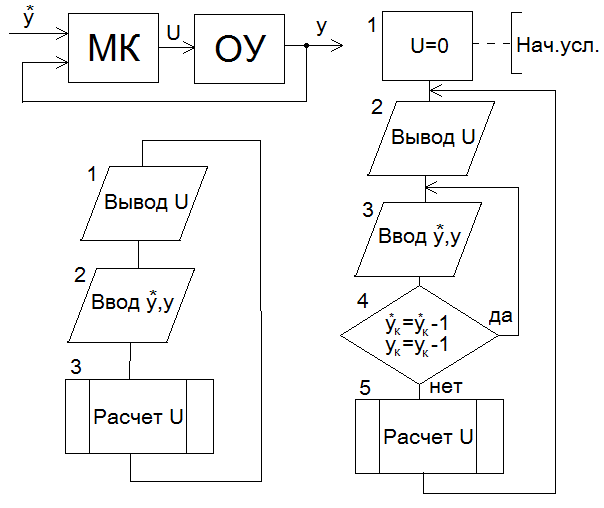
Чем больше информации нужно вводить, тем больше команд содержит программа, а следовательно она будет дольше выполняться.
Поэтому программная организация ввода-вывода имеет 2 недостатка:
Загромождение основной программы операциями ввода-вывода.
Увеличивается время выполнения управления программ (снижается быстродействие системы). Например, реакция на аварийные сигналы при программной реализации может запаздывать. В связи с этим применяется аппаратная организация ввода-вывода.
13. Параллельный и последовательный интерфейс. Области применения
Двоичная
информация хранится или в ячейках
памяти или врегистрах. Регистр может
быть выполнен как отдельное устройство,
где хранится слово данных, слово данных
хранится в параллельном виде.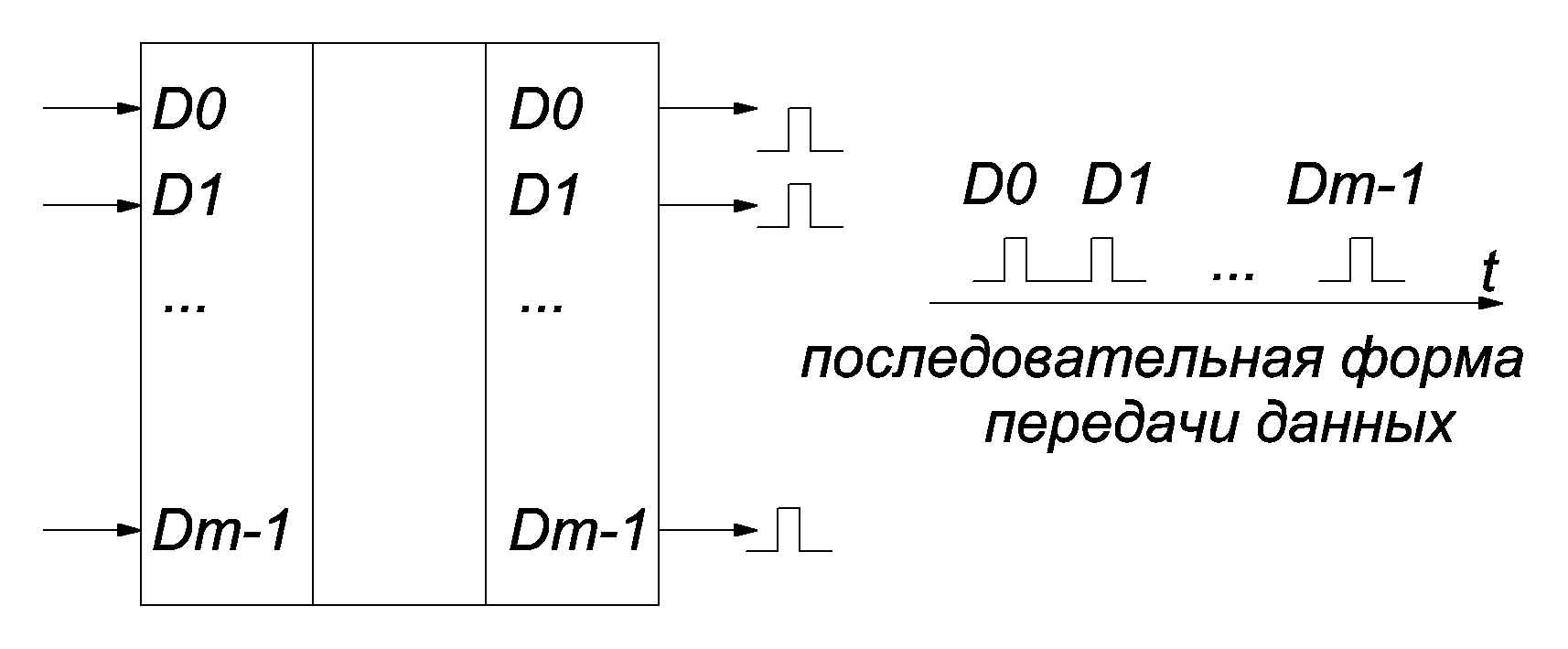
Для преобразования данных из параллельной формы в последовательную применяется мультиплексор. Для преобразования из последовательной в параллельную – демультиплексор.
Параллельный
программируемый интерфейс (ППИ, PPI).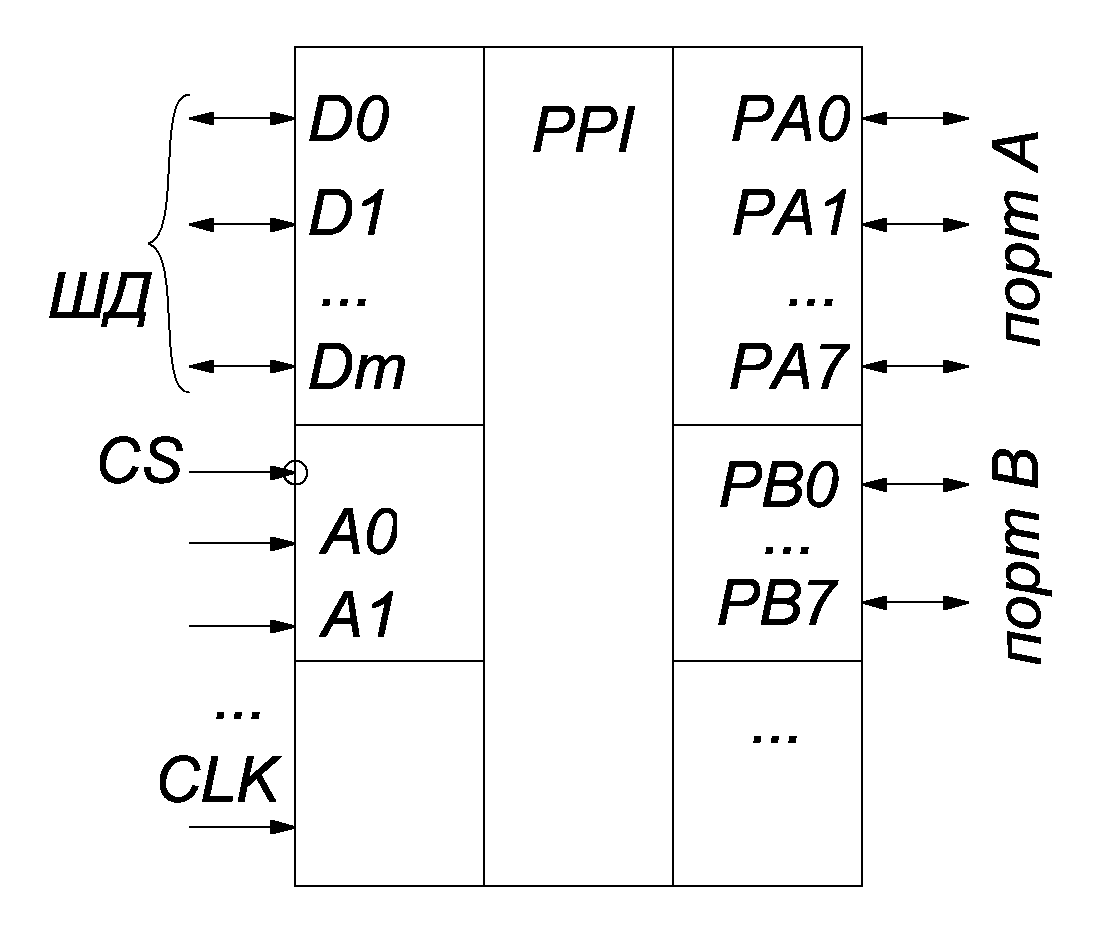
Порт – это регистр для временного хранения данных при вводе и выводе. ППИ служит для ввода и вывода параллельных данных. ППИ может содержать несколько параллельных портов и управляющие регистры. Каждый порт и управляющий регистр имеют адреса в адресном пространстве МП. Каждый бит управляющего слова предназначен для настройки опр. режима ввода-вывода.
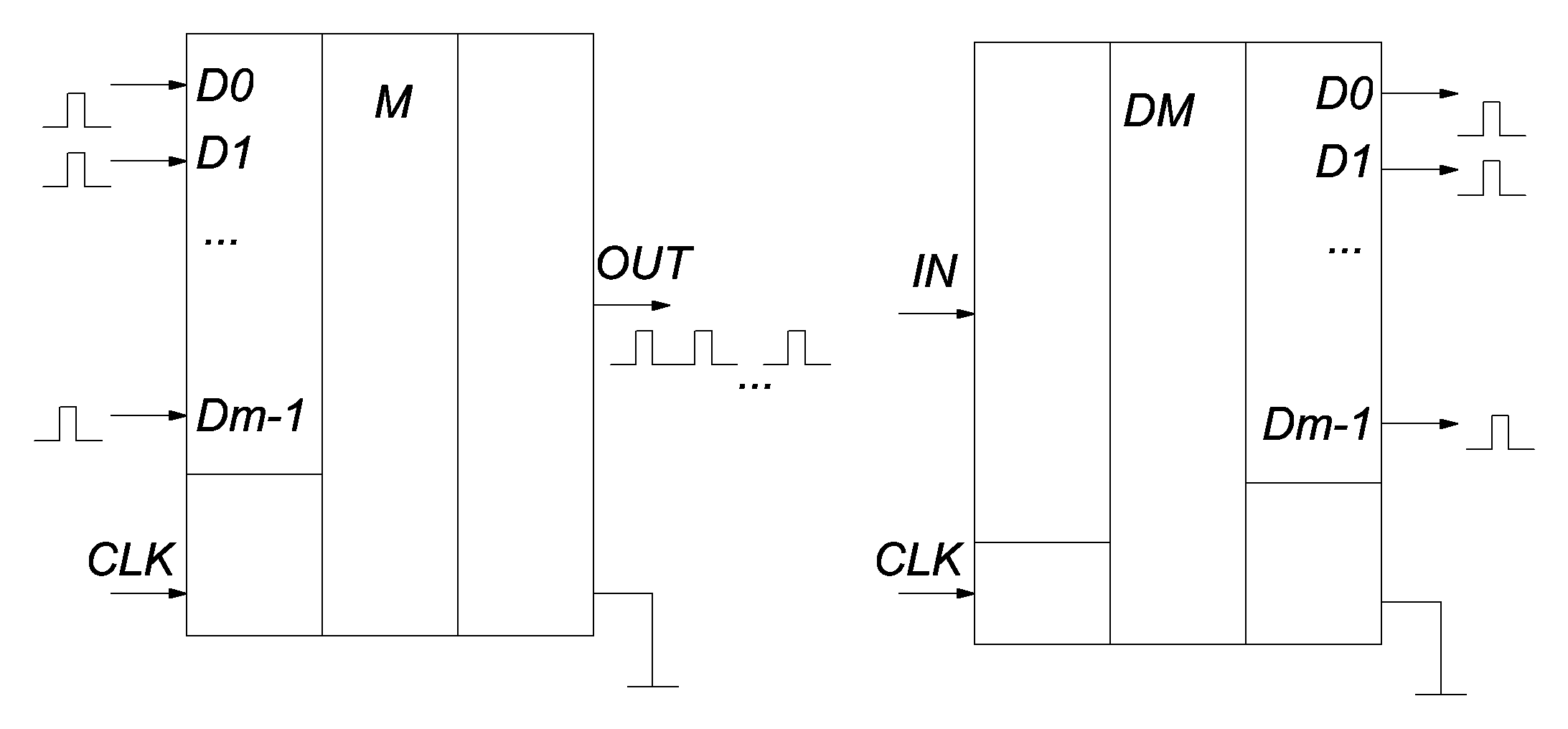
Устройство последовательного интерфейса(SPI).
UART(управляемый асинхронный приемопередатчик УАПП)
УАПП
– предназначен для преобразования
данных из параллельной формы в
последовательную для передачи по линиям
связи и наоборот.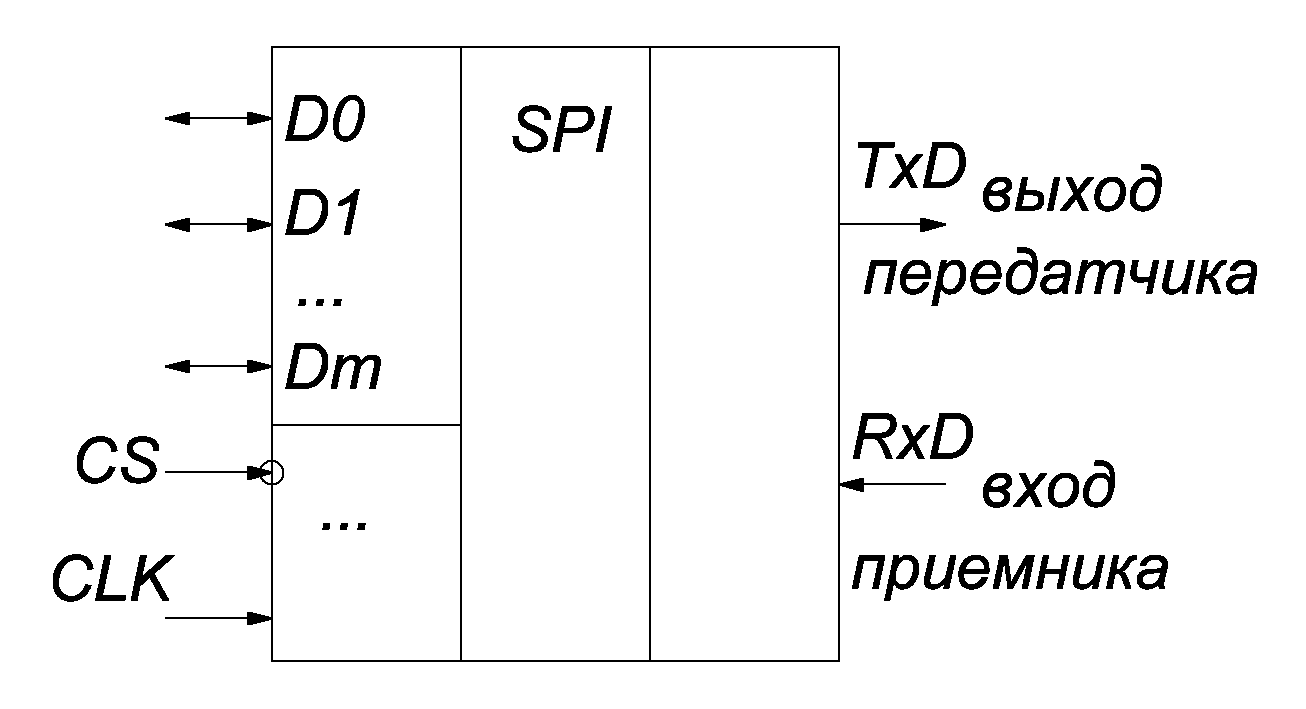
УАПП должен содержать мультиплексор и демультиплексор.
Области применения параллельного и последовательного интерфейса.
Параллельный интерфейс обладает в m раз большим быстродействием с одной стороны. Параллельный интерфейс имеет большее количество проводов. Последовательный интерфейс обеспечивает помехоустойчивость. Параллельный интерфейс допускается применять на расстоянии до 1 м из-за низкой помехоустойчивости. Параллельный интерфейс применяется для передачи на короткие расстояния, последовательный интерфейс применяется для передачи информации по линиям связи.
14. Последовательный интерфейс spi микроконтроллеров
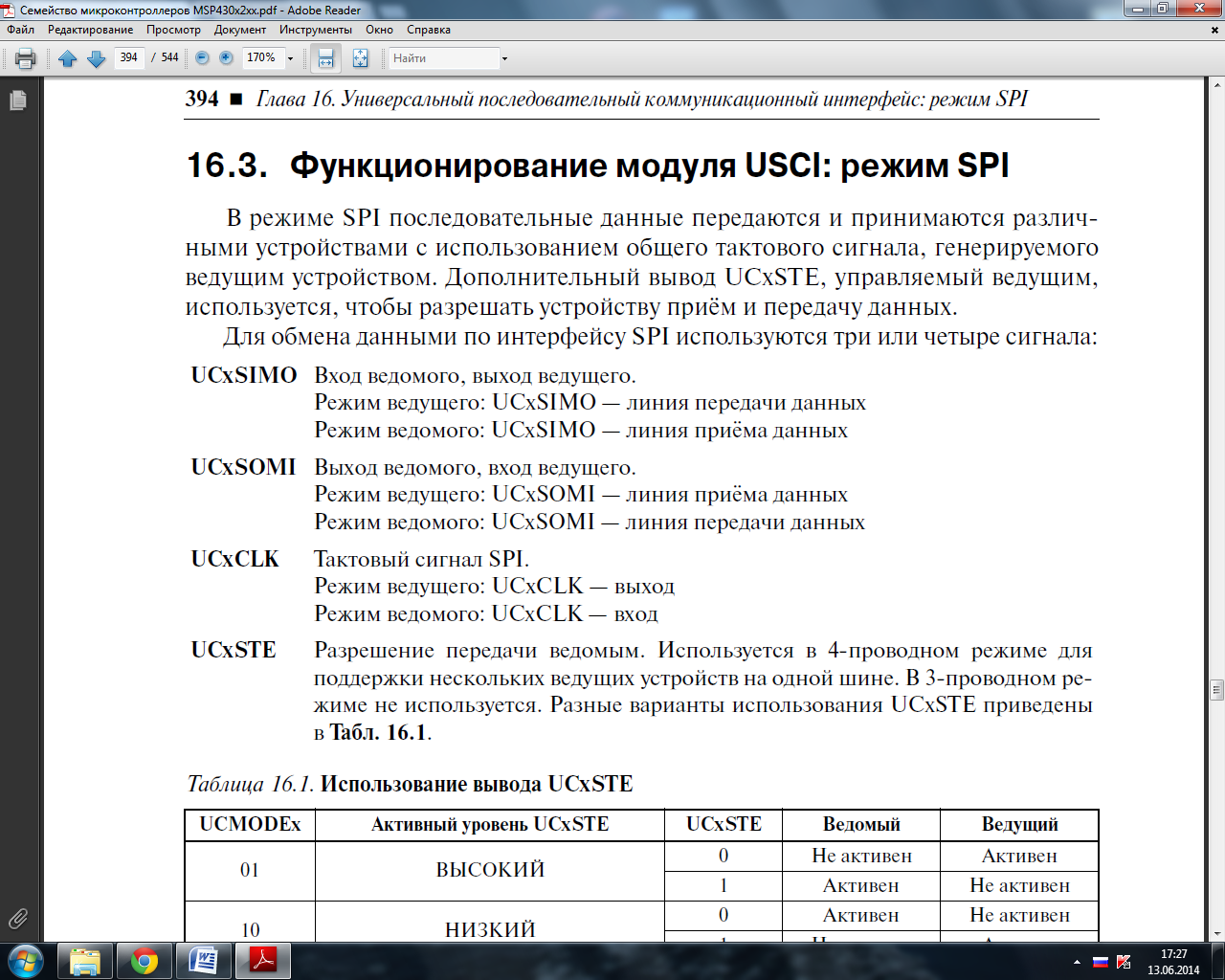
Последовательный переферийный интерфейс SPI предназначен для соединения микроконтроллеров на параллельную работу. В этом режиме последовательные данные передаются и принимаются различными устройствами с использованием общего тактового сигнала, генерируемого ведущим устройством.
![]()
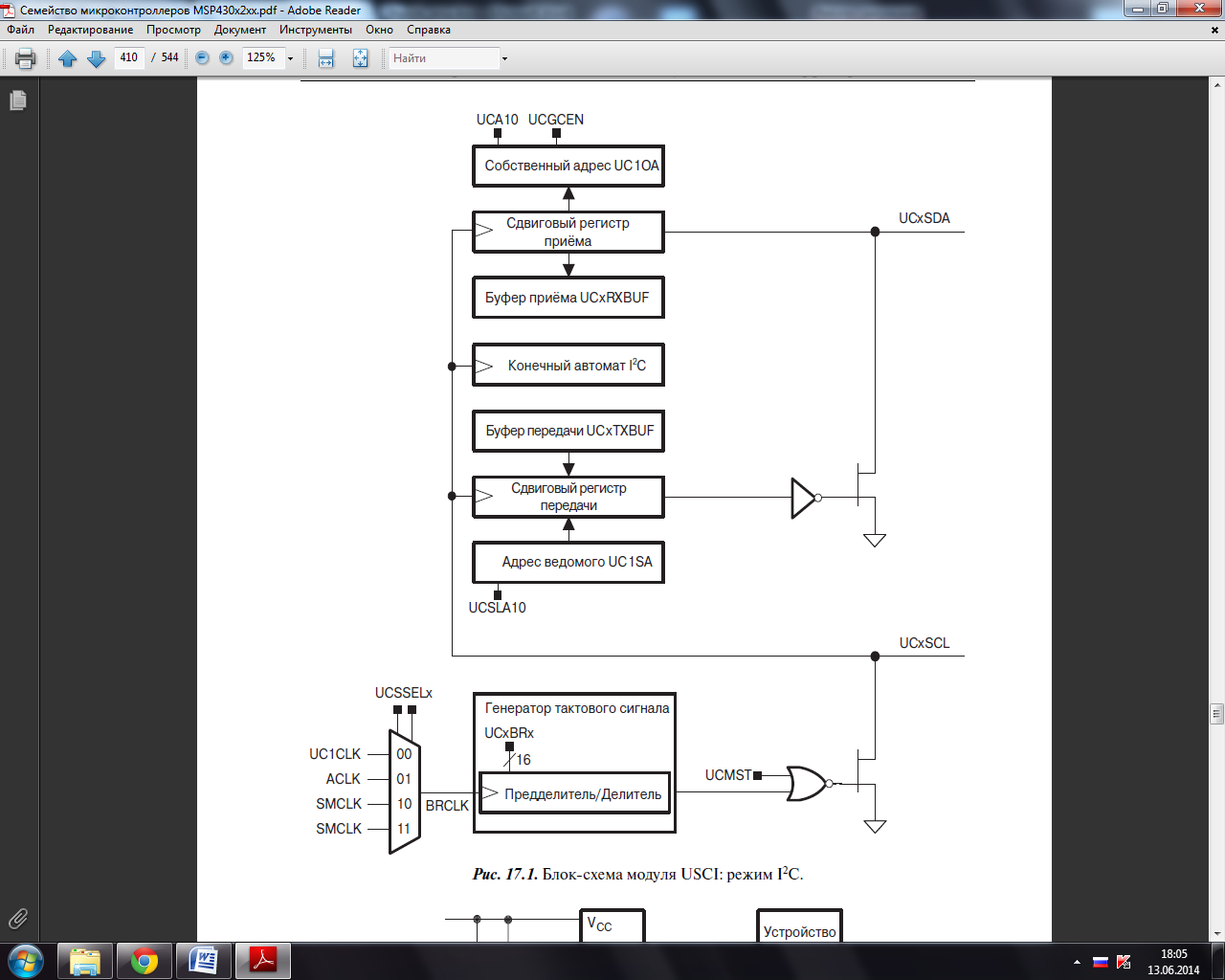
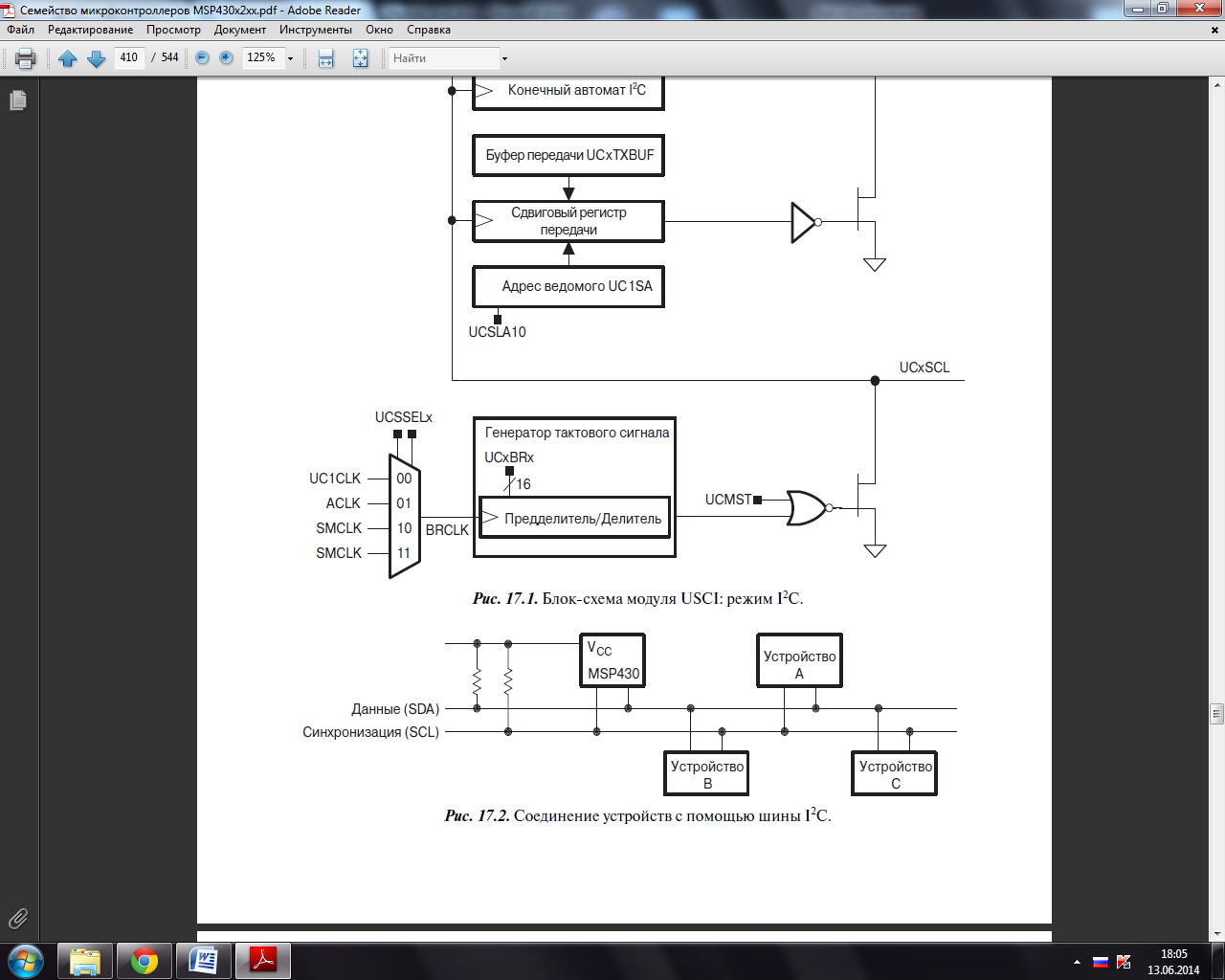
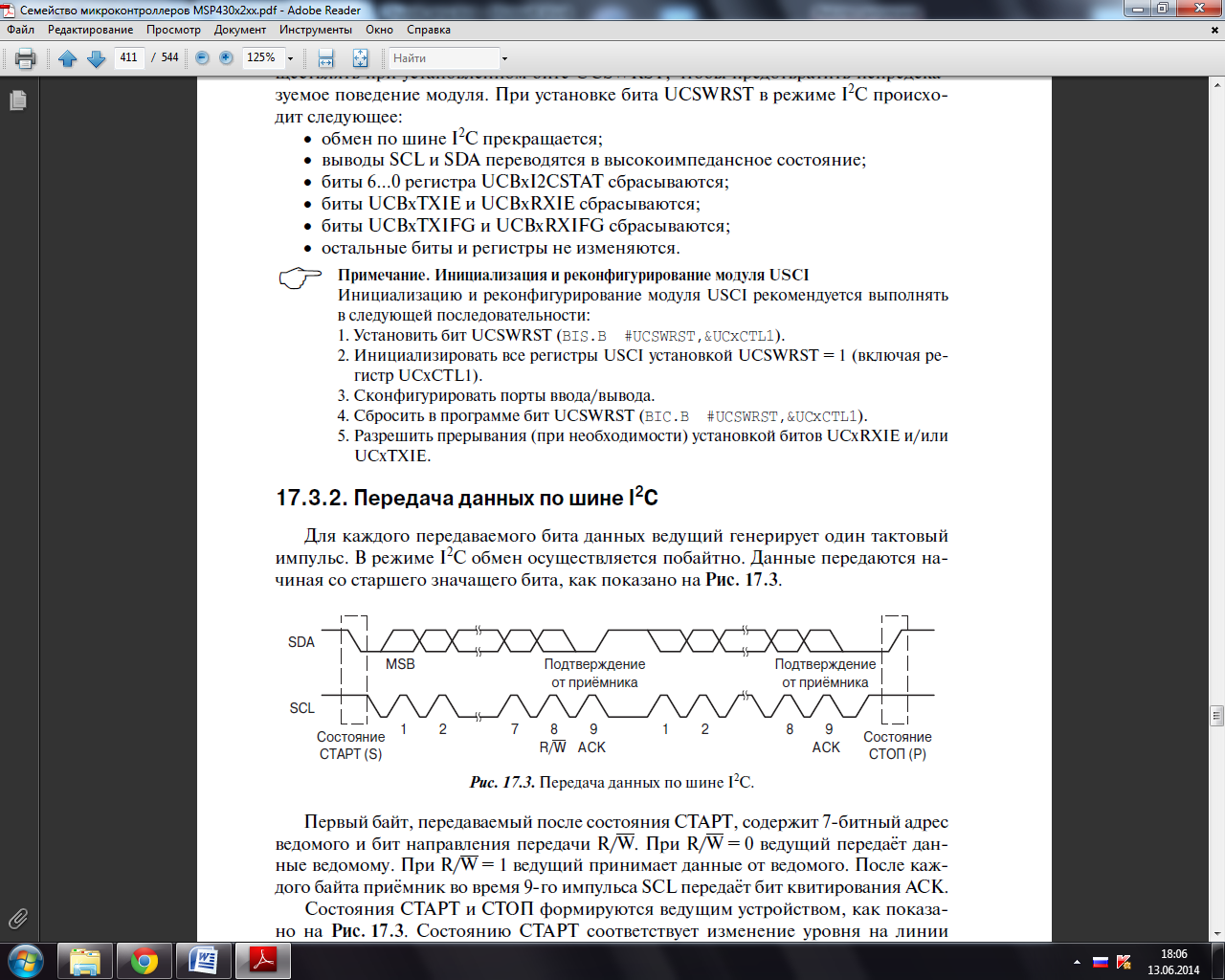
15. Последовательны интерфейс i2c микроконтроллеров