52. Использование нечеткой логики для синтеза управления. Лингвист. Переменные.
Нечеткое
множество – совокупность элементов,
для каждого из которых задана степень
принадлежности к этому множеству. А:
 ,
гдеx
– элемент,
,
гдеx
– элемент,
 - степень принадлежности.
- степень принадлежности. .
Для классических элементов:
.
Для классических элементов: .
.
Для нечеткого множества границы а и b размыты, как показано на рисунке:
Функцию
принадлежности строят с помощью
экспертных оценок или на основании
содерж. анализа того или иного множества.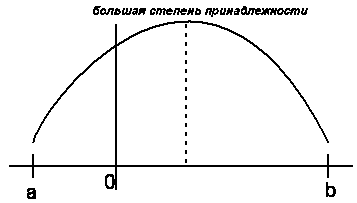
Логические операции для нечетких множеств:
А:
 ,
В:
,
В: .
.
Операция
ИЛИ
 :
: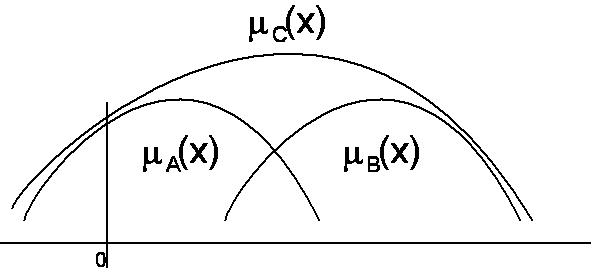

Операция И:

Арифметические
операции:
С=А+В => 
С=А*В => 
Лингвистические
переменные дают большую погрешность.
Применение их позволяет заменить мат.
расчеты логическим выводом. Логические
действия легко алгоритмизируются и не
требуют большого количества разрядов.
Если заменить действующие числа
лингвистическими переменными , то для
формирования управляющего сигнала
возможно применение логических правил
вывода. БП – большое положительное, МП
– малое положительное, Н – нулевое, МО
– малое отрицательное, БО – большое
отрицательное. Когда введены
лингвистические переменные, тогда
каждое из них представляет собой
нечеткое множество.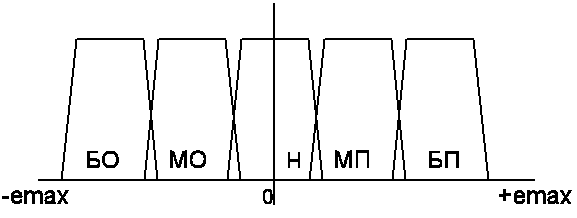
53. Алгоритм нечеткого управления
F-
фазификатор (преобразует непр.Сигнал
в лингвистические переменные)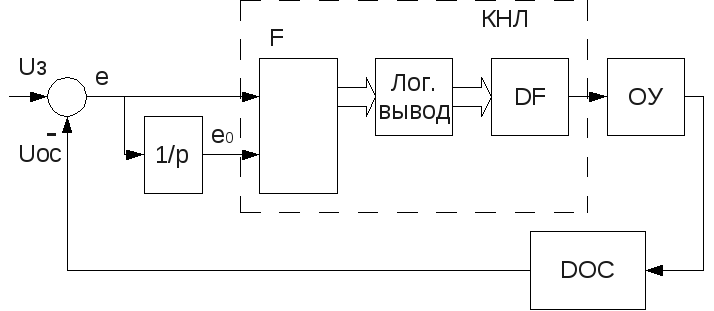
DF — дефазификатор (лингвистические переменные в непрерывный сигнал)
КНЛ — контроллер нечеткой логики
БП
формируется исходя из цели управления.
Фаззификацией называется преобраз.
действительных значений входных
переменных в лингвистические значения.
Лингвистическое значение — интервал
и функция принадлежности для действительных
чисел. Логический вывод вып-ся на
основании базы правил. В результате
получается лингвистическое значение
сигнала управления с вычисленной
функцией принадлежности. Функция
принадлежности выходной величины
рассчитывается по функции принадлежности
входных лингвистических величин.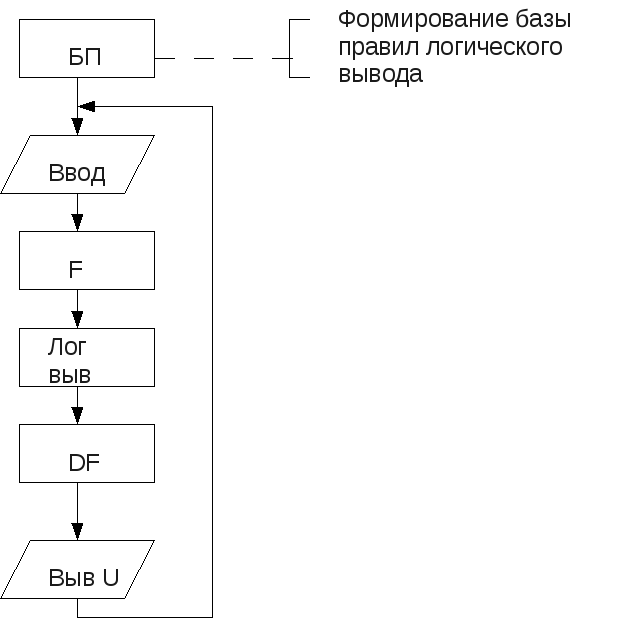
Дефаззификациейназ-ся преобразование лингвистической выходной переменной в действительное число.
Лингвистические значения: NB, NM, NZ, NL, PZ, PL, PM, PB. (на русском: ОБ, ОС, ОМ, ОН, ПН, ПМ, ПС, ПБ)
Если
 -
то величина принадлежит интервалу.
-
то величина принадлежит интервалу.
Метод
центра тяжести:

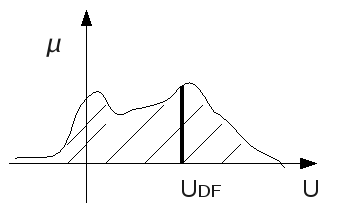
Функция
принадлежности может помимо треугольной
формы иметь сложную форму: Метод середины
площади:

Стандарты для программируемых контроллеров:
IEC 1121-7, IEC 1131-3 (1993u).
FCL — fuzzycontrollanguage — язык нечеткого управления
Область применения языка: управление в системах с ОС и без неё (классификация и распознания, принятие решений, диагностика неисправностей и тд).
54. Структура и принцип действия искусственного нейрона. Соединение в сеть
Структура искусственного нейрона
W1,…..Wn
– весовые коэфф, Х1,Х2…..Хn
–входные векторы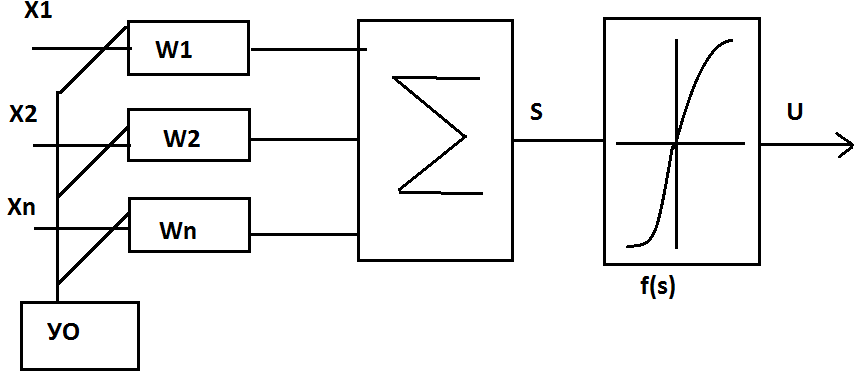
∑-суммир звено
F(s) – активац ф-ция, U – вых сигнал.
УО – устройство обучения
Искусств нейрон имеет структуру адаптивно-настраиваемого регулятора
Искусств нейрон удобен для реализации на микропроц основе в виде искусств нейросети.
Персептрон имеет функц схему:
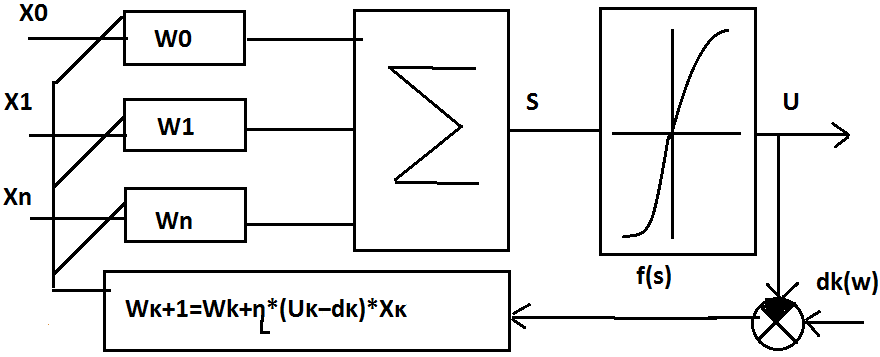
dk(w) – требуемое значение вых величины
ƞ
– определяет скорость сходимости
(обучения)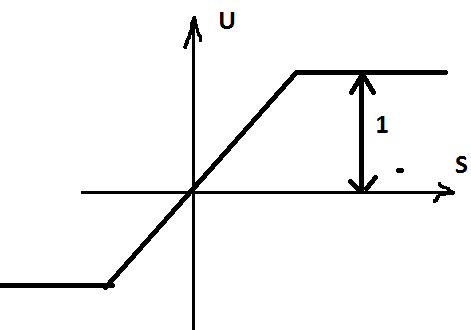
Wk+1=Wk+ƞ*(Uk-dk)*Xk
Персептрон
для классиф входных векторов путем
отнесения их к одному из классов L1,L2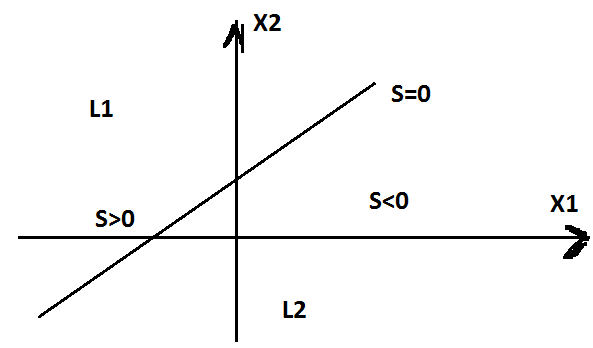
X=(X0….Xn)^T – Входной вектор
S=X*W^T – скалярнпроизвед векторов
Значение
выхода искусств нейрона позволяет
определить к какой полуплоскости относ
вектор.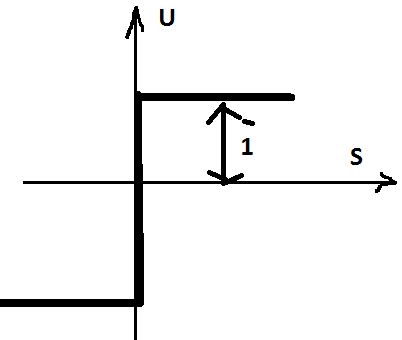
Активация функции может иметь разл вид:
U=max(0,signS)
U=sgnS
U=max(-1,min(S1))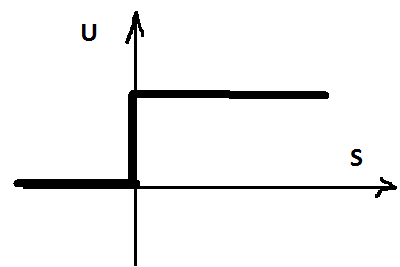
U=1/(1+e^-αS)
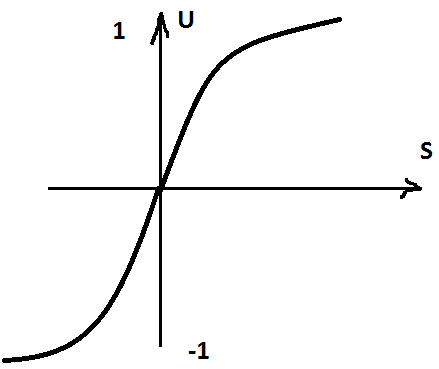 U=th(αS)
U=th(αS)
От вида активации ф-ции зависит тип выполнлогич операции. Если f(s) имеет вид релейного элемента, то персептрон может выполнять операции в виде четкой логики.
Если f(s) в виде четкой гладкой кривой, то Персептрон может выполнять операции нечеткой логики.
Выбор алгоритма обучения зависит от задачи.
В
ИНС использ несколько алгоритмов
обучения: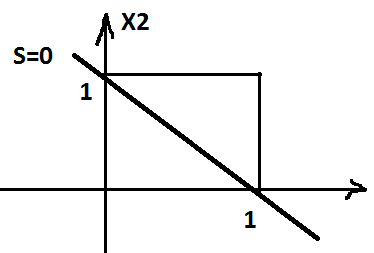
- обучение с учителем: предполагает обучающее множество обуч векторов и каждый из них соотв свой вых сигнал.
- обучение без учителя: использтекущую о входах и выходах
Для выбора метода обучения может быть выбран генетический алгоритм.
Выполнение логических операций персептроном
Х0=±1
или др произвольным числом
Значения, кот могут принимать входн значения
С пом простейшего персептрона невозможно выполнискл ИЛИ
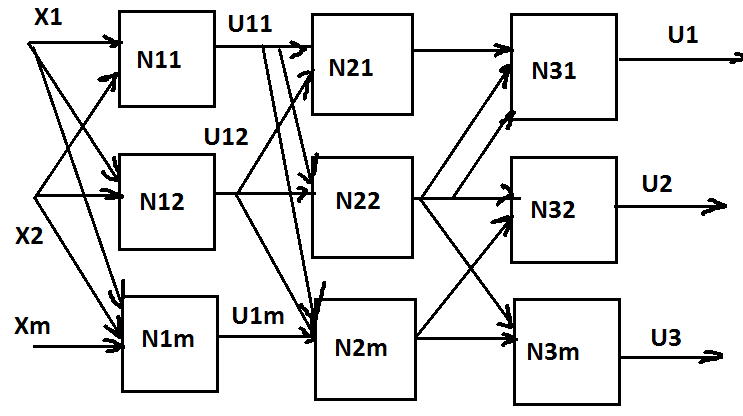
Соединение иск нейронов в сеть
Обычно
использ не более трех слоев нейронных
сетей. Искусств нейросеть имеет регулир
структуру. Кол-во процессорных элементов
равно кол-ву нейронов. Алгоритм обучения
примен к каждому нейрону.