

29. Микроконтроллер как динамическое звено.

АИМ – амплитудно-импульсная модуляция
ЗЗ – звено запаздывания
ФП – функциональный преобразователь
Микроконтроллер обладает запаздыванием τ:


U
←амплитудная модуляция
0 τ τ t
Переход к Z – преобразованию


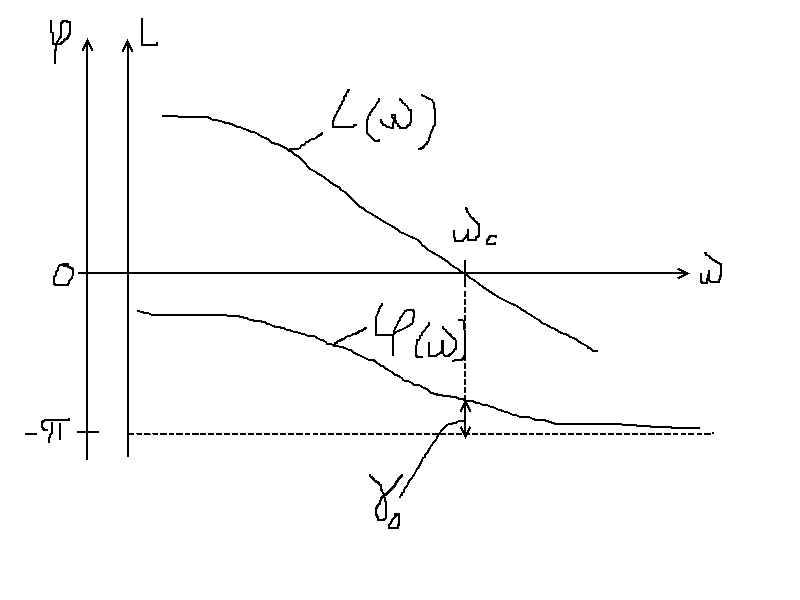
если τ<<(2/ωс) , то можно использовать непрерывную модель системы с непрерывной передаточной функцией W(p).
W(p) →F(p)→F(z)
30. Влияние времени выполнения программы микроконтроллером на запас устойчивости и динамические св-ва замкнутой системы
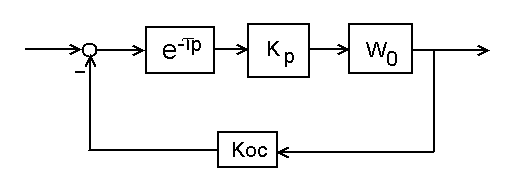


Запаздывание в МК равно времени обработки информации τ. Запаздывание приводит к изменению помехоустойчивости контура:
τз ≈ 2τ÷1,5τ
В современных МК собираются добиться малого τ, поэтому величиной запаздывания τ можно пренебречь и считать МК безынерционным звеном.
31. Выбор числа разрядов слова данных по требуемой точности системы управления.
1) Система управления положением:
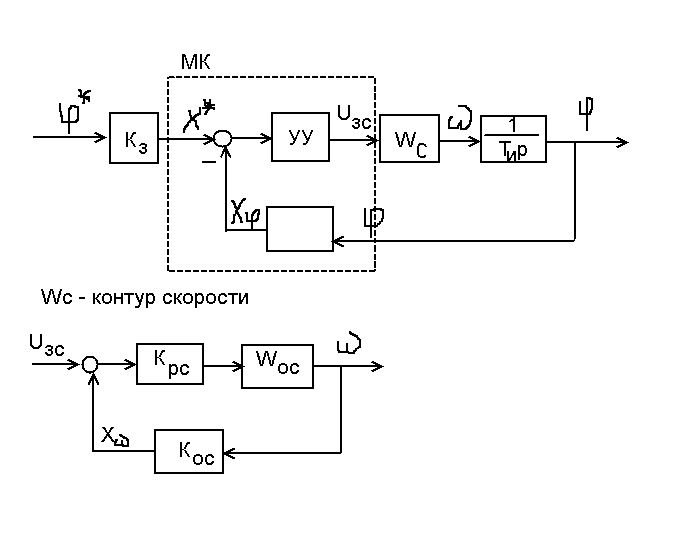
2) Система управления скоростью:
Для таких систем обычно задаются
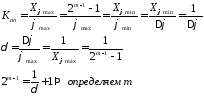

Требуемое
количество разрядов контроллера при
интерполяции определяется на основании
формулы:
 ,
(1)
,
(1)
где K – количество разрядов контроллера.
Таким образом, для нахождения разрядности микроконтроллера, необходимо решить неравенство:
 .
(2)
.
(2)
Таким образом, исходя из заданной точности, для реализации программы управления необходимо к разрядов.
32. Рекурсивные и нерекурсивные цифровые фильтры
Цифр. Фильтр называется рекурсивным, если сигнал на его выходе зависит от знач. Вых. Сигнала на предыдущих шагах.



По последнему выражению составим структурную схему:

Цифр. Фильтр допускает аппаратную программную реализацию. Аппаратная реализация выполняется на основании структурной схемы. Для аппаратной реализации применяются процессорные матрицы. Каждый процессор выполняет 1-ну или несколько операций.
Для программной реализации цифрового фильтра используется переход от z-изображения к оригиналу.

Необходимые
параметры
 ,
а также начальные условия:
,
а также начальные условия: .
При переходе к след. Шагу расчета должны
возрастать, т. есть в памяти необходимо
хранить вход.и выход. величины на 2-х
пропущенных шагах.
.
При переходе к след. Шагу расчета должны
возрастать, т. есть в памяти необходимо
хранить вход.и выход. величины на 2-х
пропущенных шагах.
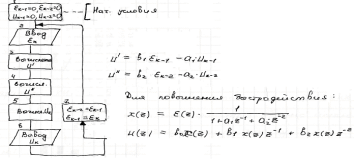

Перейдем к рекурсии:

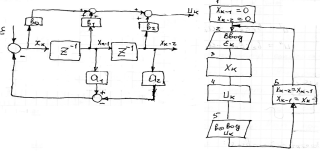
Нерекурсивный фильтр

Структура фильтра имеет след вид:

КИХ и БИХ
Импульсная хар-ка (ИХ) - реакция на ед. импульс:

Такая (ИХ) является конечной (КИХ). Рекурсивные фильтры обычно имеют бесконечную имп. характеристику.
33. Формирование алгоритма и программ расчёта выходных величин цифровых регуляторов
Наиболее важным функциональным узлом систем автоматического управления являются регуляторы, которые реализуются в микропроцессорной САУ программным путем и являются (из-за наличия в системе квантования по времени и уровню) цифровыми регуляторами. К параметрически оптимизируемым регуляторам относятся классические виды регуляторов типа П-регулятор, ПИ-регулятор, ПИД-регулятор и их модификации. К структурно оптимизируемым - компенсационные регуляторы и регуляторы состояния.
Наиболее распространенным регулятором, применяемым в системах управления динамическими объектами, является ПИД-регулятор и его модификации. Аналоговый ПИД-регулятор имеет передаточную функцию вида
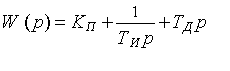 ,
,
где КП - коэффициент передачи пропорциональной части регулятора, ТИ - постоянная времени интегрирования, ТД - постоянная времени дифференцирования.
Этой передаточной функции соответствует дифференциальное уравнение
 ,
,
где ![]() -
выходная величина регулятора (управление),
а
-
выходная величина регулятора (управление),
а![]() -
сигнал рассогласования.
-
сигнал рассогласования.