

19. Программная реализация интервалов времени.
Внутри микроконтроллера время измеряется тактовыми периодами.для того чтобы полу время в сек. необх. расчет с учётом тактовой частоты
Недостатки: низкая точность формирования сигналов, погрешность соизмерима с длительностью командного цикла.
Подпрограмма выдержки времени n=0.7
|
Мнемокод |
Комментарий |
|
T:MOV#0.7 R6 MOV#FFFF,R5 m: SUB#0.1,R5 JNZ m SUB#0.1,R6 JNZ m1 RETI |
n
T R5R5 -1 т(тау) R6 R6-1 |
 R6
R6 R5
R5Подпрограмма располагается в памяти в любом свободном месте
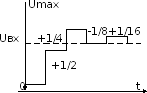
Пример: сформировать линейно возрастающее задающее воздействие.
Начальн.знач. – нулевое, конечное – максимальное восьмиразрядное.



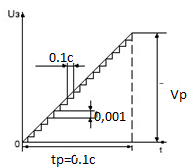
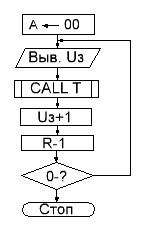
Запишем главную программу:
|
Мнемокод |
Коммент. |
|
MOV.B#FF,022 MOV.B#00,02B MOV.B#00,029 MOV.B 020,R7 CALL T ADD.B#01,029 SUB.B#01.R7 JNZ m |
P1DIRFF ВВОД P2DIR00 ВЫВОД
0
Vm R7
Uз+1P2 R7-1 |
 P2
P2
20. Аппаратная реализация интервалов времени
Программирование
таймера предназначено для отсчетов
интервалов времени и для времязадающих
функций (формирование последовательности
импульсов, импульсной модуляции,
управление устройствами в функции
времени)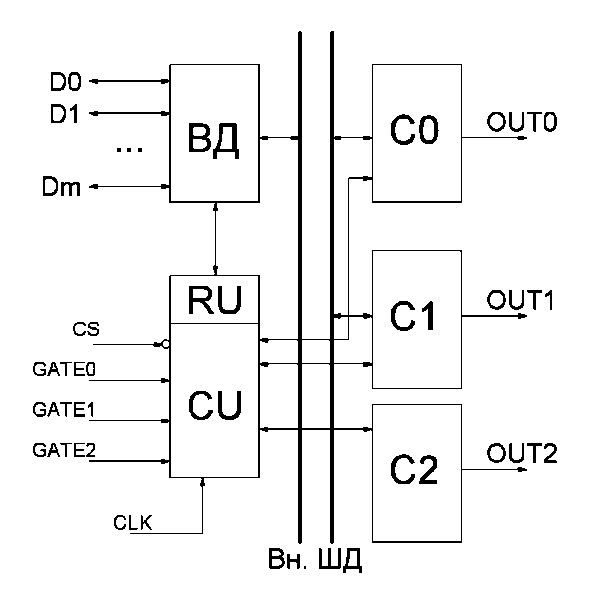

Функциональная схема программируемого таймера.
Принцип действия ПТ:
Каждый канал таймера содержит 16-разрядные счетчики. Перед использованием записывается в счетчик пропорциональное интервалу времени значение. После поступления на вход сигнала GATE (разрешение счета), то счетчик декрементируется с каждым тактовым импульсом, когда содержимое достигает нуля - на выходе формируется импульс.
Существует 2 режима работы ПТ: режим таймера и режим счетчика. В режиме счетчика организуется счет количества импульсов. В режиме счетчика организуется счет количества импульсов. В режиме счетчика можно определять длительность интервалов. Можно задать направление счета. Чтобы запрограммировать таймер, он должен быть подключен к ЦПУ. После этого он может работать вместе с ЦПУ или как самостоятельное устройство.
Для
начала работы таймера нужно на его вход
разрешения счета подать импульс.
Обычно таймеры входят в состав микроконтроллеров.
Пример:
 .
Определить значение, которое нужно
записать в счетчик таймера.
.
Определить значение, которое нужно
записать в счетчик таймера.

![]()
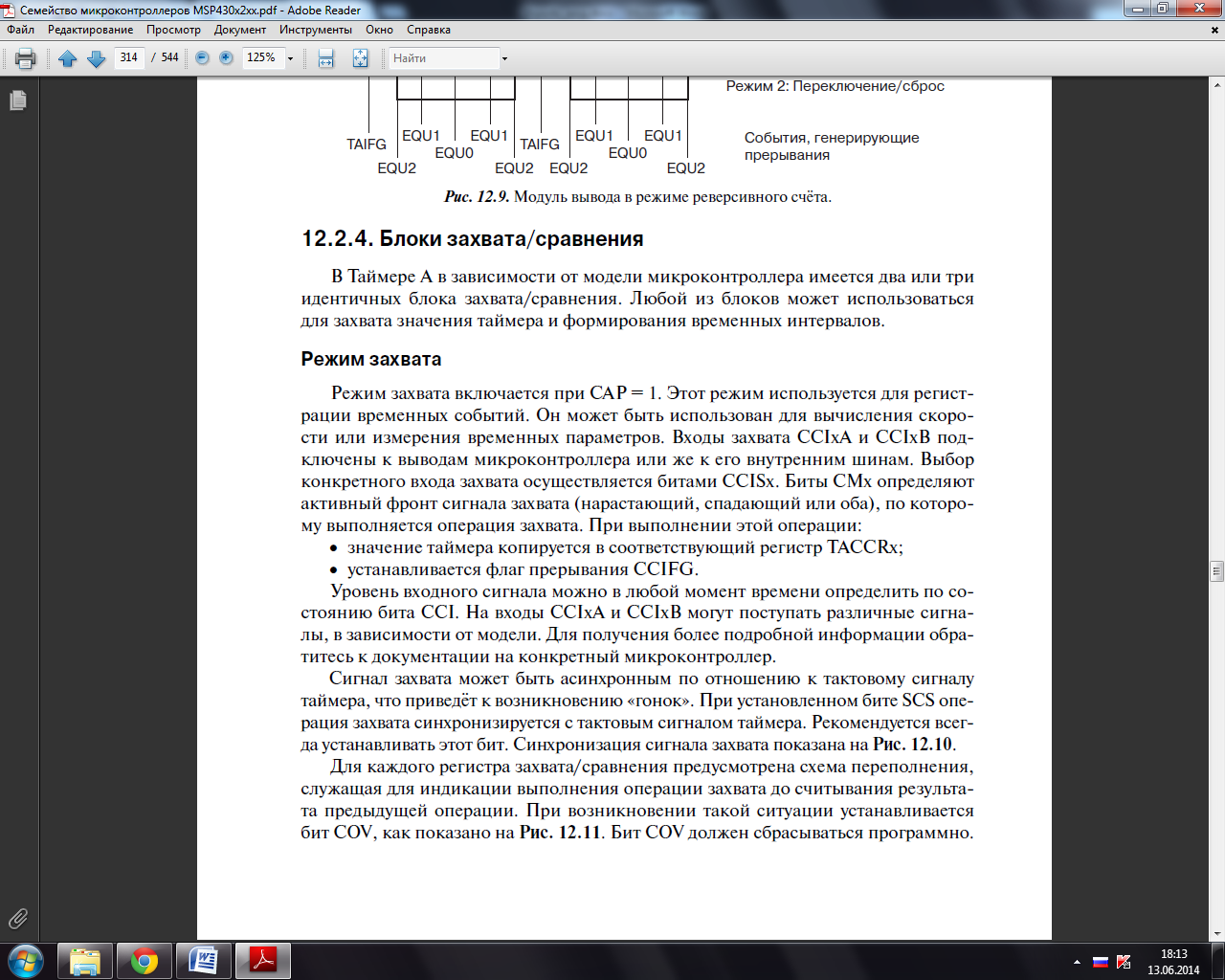
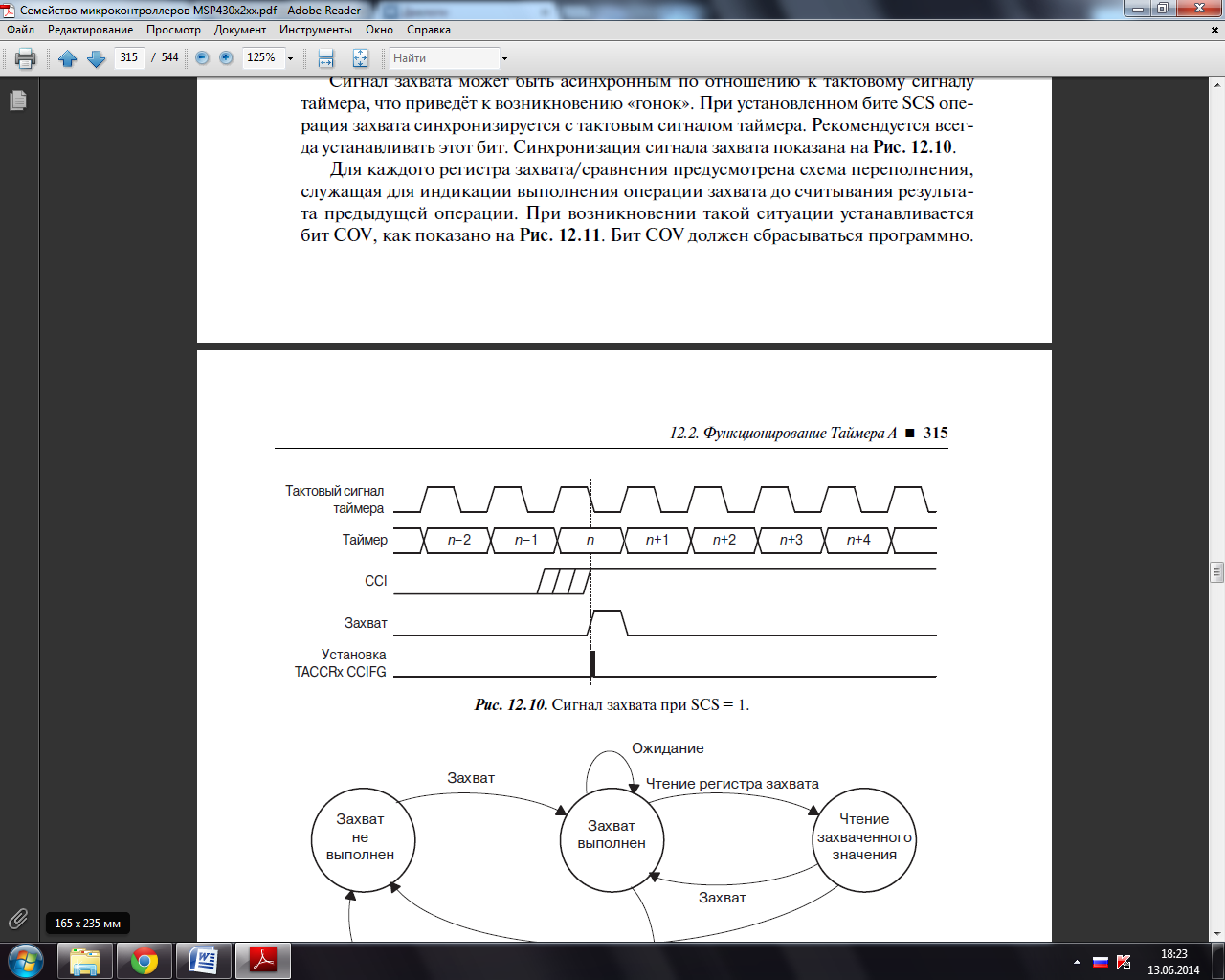
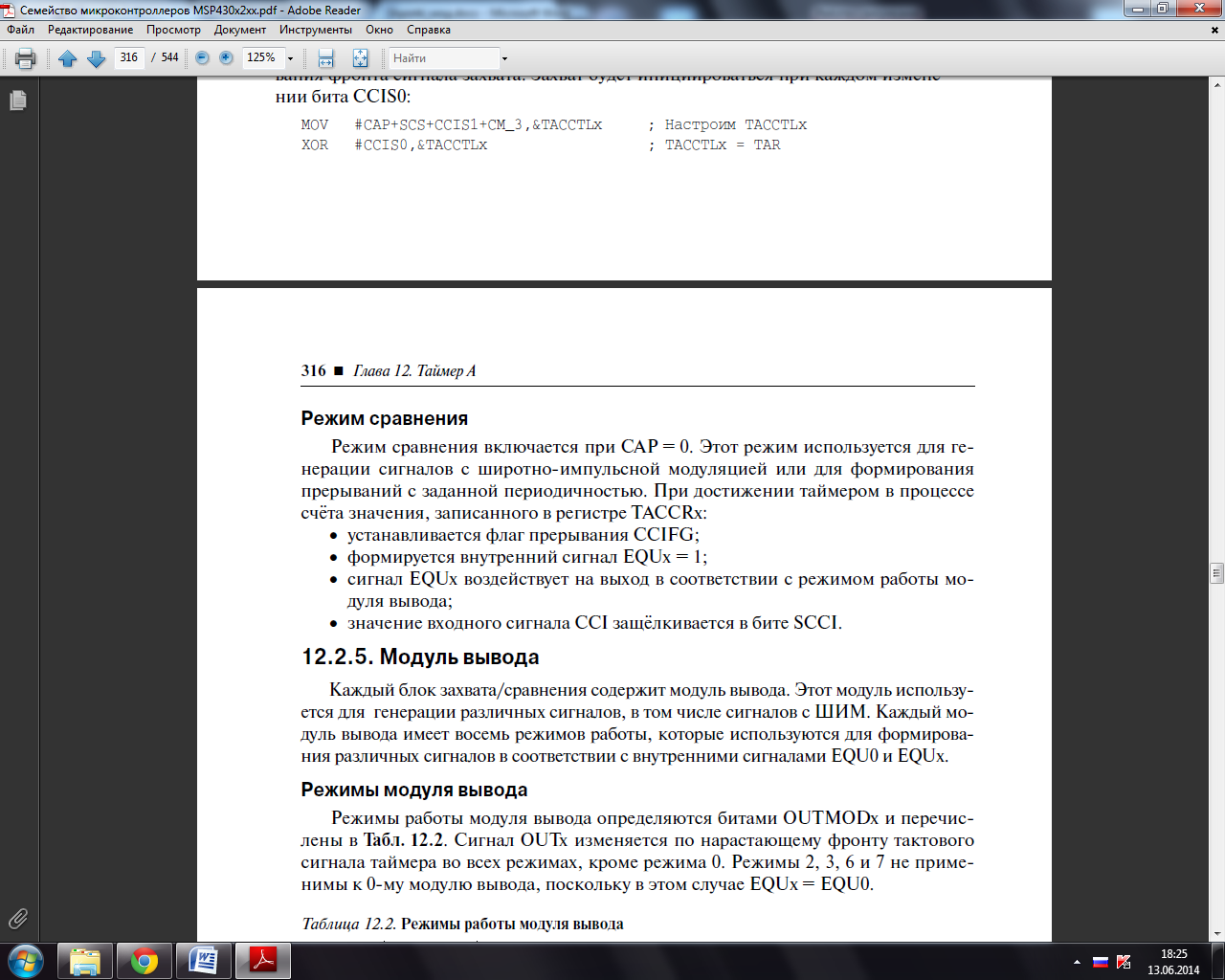
21. Работа таймера в режимах захвата и сравнения
22.Цифро-аналоговое преобразование.
Цифро-аналоговое
преобразование – для преобразования
двоичного кода в сигнал напряжения, в
частности в составе АЦП.
Ki в каждом канале выбирается так, что бы наибольший вес имели старшие разряды
А2 для учитывания знака сигнала
Двоичный
код преобразуется в инт. Времени, а инт
времени благодаря шим в сигнал постоянного
напряжения.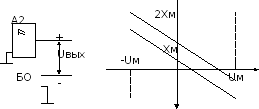
АЦП предназначен для преобразования непрерывной величины в двоичный код. Преобразование включает в себя дискретизацию по времени, квантование по уровню, кодированию. Эти операции могут выполняться одновременно, т.е. параллельно или последовательно.
АЦП:-параллельный-последовательный
-параллельно-последовательный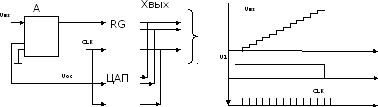
Функциональная схема АЦП
Время преобразования пропорционально входному сигналу.
Такой способ можно применять при больших тактовых частотах.
Для уменьшения времени преобразования используют алгоритм управления

m- количество разрядов

k- номер шага преобразования

Времяимпульсная модуляция – время импульса пропорционально модулирующей величине.
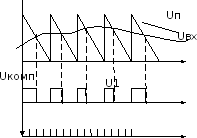
При
наличии тактовых импульсов таймер
можно использовать в качестве счётчика,
т.е. количество тактовых импульсов за
время импульса
 есть величина, пропорциональная
входному напряжению.
есть величина, пропорциональная
входному напряжению.
Время
преобразования


Время АЦ преобразования возрастает пропорционально требуемой точности при той же тактовой частоте.
Для повышения быстродействия следует увеличить тактовую частоту.
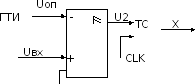
АЦП с применением время-импульсной модуляции, ТС – таймер-счётчик.