

16. Принцип действия программируемого таймера.
Программируемый таймер предназначен для отсчета интервалов времени и для времязадающих функций (формирование последовательности импульсов, импульсная модуляция, управление устройствами в функции времени).
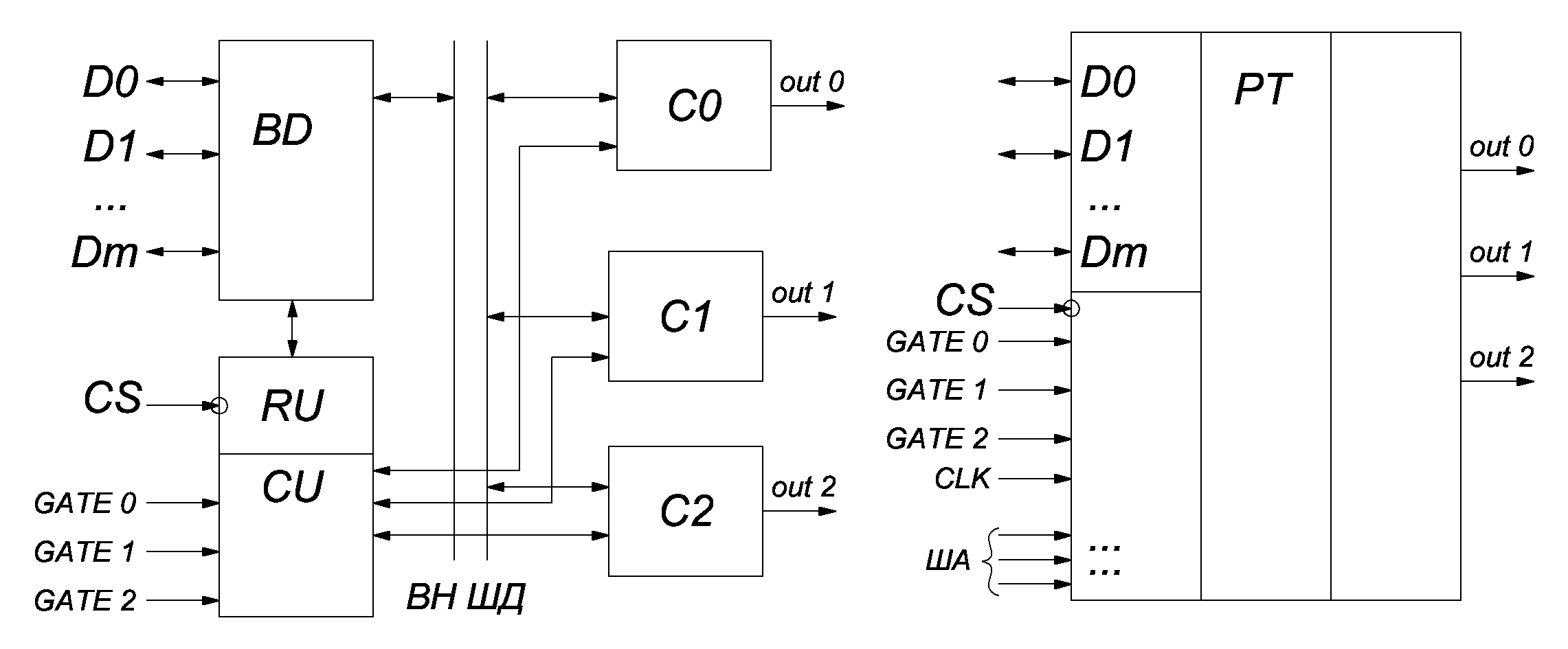
Вначале в управляющий регистр записывается управляющее слово, оно определяет режимы работы таймера. Режимы: режим таймера, режим счетчика. В режиме таймера формируется временной интервал. В режиме счетчика организуется счет количества внешних импульсов. При задании режима можно задать направление счета(инкрементирование, декрементирование). Далее составляется управляющее слово и записывается в регистр. В счетчик записывается значение пропорциональное интервалу времени(таймер). Чтобы запрограммировать таймер он должен быть подключен к CPU. После того как таймер запрограммирован, он может работать вместе с CPU, или самостоятельно. Чтобы таймер начал работу необходимо на вход разрешения счета подать импульс.
N=7, режим таймера, работа на декрементирование.

Обычно таймеры входят в состав микроконтроллеров.
Пример:
Δt=0,01 с;ft=1 МГц;
определить значение, которое нужно записать в счетчик таймера чтобы получить необходимое Δt
N= Δt· ft=10000=213+210+29+28+24
0010 0111 0001 0000 = 271016
17. Ввод и вывод информации с применением прерываний.
1)Программная реализация ввода вывода в КР580 это INport и OUTport. При программной реализации ввода алгоритм должен предусматривать периодический опрос портов ввода. Это приводит к увеличению объёма программы и загрузке ЦП.
2)Программно-аппаратный ввод-вывод. Выполняется в режиме прерывания. Запрос на прерывание вырабатывают внешние устройства. Этот запрос поступает на специальные входы м/с. В результате выполняется прерывание текущей программы и процессор выполняет программу прерывания. Эта спец. программа должна обеспечить выполнение операций. После выполнения ввода-вывода возобновляется выполнение основной программы. Режим прерываний возможен в том случае, если система содержит спец. устройство – программируемый процессор прерываний ПКП, PIC: а) ПКП должен выполнять арбитраж – контроль приоритетов (чтобы не было много сигналов на прерывание).Используется 2 вида приоритета: фиксированный и циклический. Фиксированный обеспечивается схемно:

При
циклическом приоритете только что
обслуженное ус-во получает низший
приоритет; б) ПКП должен формировать
запрос на прерывание; в) разрешение
прерывания появляется тогда, когда
закончен очередной цикл. После этого
формируется команда CALLad
(вектор прерывания) – начальный адрес
подпрограммы прерывания.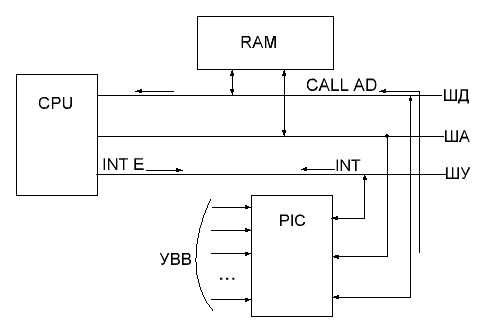
18.Работа вычислительного устройства в режиме прямого доступа к памяти.
Это аппаратный способ ввода-вывода. Предназначается для передачи больших массивов данных. Область применения – между внешними устройствами и оперативной памятью. Режим ПДП возможен в вычислительной системе, если в ней имеется контроллер ПДП (КПДП).
Функции КПДП:
- арбитраж;
- формирование сигнала «захват» магистрали (HOLD);

- принимает сигнал подтверждение захвата (HLDA), после этого принимает или передаёт данные.
В режиме ПДП CPU отключается от магистрали. К магистрали подключается КПДП для непосредственной передачи информации между устройствами и памятью. Для того чтобы осуществить ПДП магистраль должна быть свобод.
