

14-es_1 / Высшая математика (РТФ) / умк_Вакульчик_Элементы векторной алгебры
.pdfДоказательство:
При λ >0 имеем
прl (l × a ) = la × cos j = l × a × cos j = l × прl a .
При λ <0 имеем
прl (l × a ) = la × cos(p - j) = -l × a ×(-cos j) = l × прl a .
Свойство справедливо, очевидно, и при l = 0.
Вывод: Таким образом, линейные операции над векторами приводят к соответствующим линейным операциям над проекциями этих векторов.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
ϕ |
|
|
|
a1 |
|
|
|
|
|
|
|
|
|
|
|
l |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
b1 |
|||||||||||||
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
d1 |
|
|
|
|
|
|
|
c1 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
Рис. 4 |
|
|
|
|
|
|
|
|
Рис. 5 |
|
|||||||||
4.4. Линейная зависимость и независимость векторов
Определение 4.4.1. Линейной комбинацией системы векторов a1, a2 , ..., an называется вектор l1a1 + l2 a2 + ... + ln an , где λ i - числа, i = 1, 2,..., n .
Определение 4.4.2. Система векторов { a1, a2 , ... , an } – линейно зависима, если существуют числа λ i ÎR, одновременно не равные нулю,
такие, что справедливо равенство l1a1 + l2 a2 + ... + ln an = 0 . Определение 4.4.3. Система векторов { a1, a2 , ... , an } называется
линейно независимой, если их линейная комбинация равна нулю тогда и только тогда, когда все коэффициенты в этой линейной комбинации равны нулю.
Иными словами, для линейно независимой системы векторов выпол- няется равносильность:
l1 a1 + l2 a2 +…+ ln an = 0 Û l1 = l2 =¼= ln = 0.
21

ТЕОРЕМА 4.4.1. Любые два вектора, лежащие на прямой, линей- но зависимы.
Доказательство. Пусть a и b лежат на одной прямой a и b
коллинеарны по определению. Тогда по Т.4.2.1 существует k ¹ 0 такое, что a = k ×b a +(-k)×b =0 $ l1 =1 и l2 = -k ; l2 ¹ 0 ,
что выполняет условие определения 4.2.1 { a и b } ¾ линейно зависи- мы.
Вывод: на прямой может быть только один линейно независимый вектор.
ТЕОРЕМА 4.4.2. Любые два неколлинеарных вектора на плоско- сти линейно независимы.
Доказательство. Предположим противное: пусть a не является коллинеарным b , но { a ; b } линейно зависима по определению 4.4.1. $ l1, l2, одновременно ¹ 0, такие, что l1× a +l2 b =0.
Пусть l2≠0, тогда λ2 |
|
= -l1 |
|
. Тогда |
|
= - |
l1 |
× |
|
, |
|
= k × |
|
|
|
|
|
b |
b |
||||||||||||
b |
|||||||||||||||
|
a |
a |
|||||||||||||
a |
|||||||||||||||
l 2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
по Т.4.2.1. a b , что противоречит условию. Значит, наше предположе-
ние не верно. Отсюда заключаем, что a и b линейно независимы, что и требовалось доказать.
ТЕОРЕМА 4.4.3. Любой вектор на плоскости может быть пред- ставлен в виде линейной комбинации двух неколлинеарных векторов.
|
|
|
|
Доказательство. |
|
|
Пусть |
|
|
|
¹ 0 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
¹ 0 , |
|
|
не является коллинеарным |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
b |
|
|
b |
А1 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
a |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
Покажем, что " |
|
|
Î R 2 , |
который |
|
|
|
|
|
|
c |
|
|
|
|
||||||||||||||||
|
|
|
|
c |
OA1 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
лежит в той же плоскости, что вектора |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
b |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
a и b , может быть представлен в виде |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
В1 |
|||||||||||||
линейной комбинации векторов |
|
и |
b |
|
|
|
О |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
OB1 |
|||||||||||||||||||||||||||
a |
|||||||||||||||||||||||||||||||||||
|
|
|
|
Приведем три вектора к общему |
|
|
|
|
|
Рис. 6 |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
так, чтобы |
|
|
|
|
|
|
||||||||||||||||
началу О и достроим |
|
|
|
и |
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
вектор c был диагональю параллелограмма, построенного на векторах a и b (рис. 6). По правилу параллелограмма c = OA1 + OB 1 . Так как b OA1 ,
то по Т.4.2.1 $ l1 ¹ 0, что OA1 = l1b ; a OB 1 по Т.4.2.1 $ l2 ≠0,
|
ОВ1 |
= l2 |
|
. |
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
= l1 |
|
+ l 2 |
|
|
, |
(4.4.1) |
|
|
Тогда |
с |
b |
a |
||||||||
что и требовалось доказать. |
|
|
|
|
|
|
|
|
|
||||
22

Следствие. Любые три компланарных вектора линейно зависимы. Вывод: На плоскости может быть максимально два линейно неза-
висимых вектора.
Замечание 4.4.1. Равенство 4.4.1 называют разложением векто-
ра с по системе линейно независимых векторов.
Замечание 4.4.2. Аналогично Т.4.4.2. можно доказать, что три некомпланарных вектора линейно независимы в трехмерном пространстве.
ТЕОРЕМА 4.4.4. В трехмерном пространстве любой вектор можно представить в виде линейной комбинации трех некомпланарных векторов. (Доказать самостоятельно).
Замечание 4.4.3. Из Т.4.4.4 следует, что четыре вектора линей- но зависимы в трехмерном линейном пространстве.
Вывод: В трехмерном пространстве может быть максимально три линейно независимых вектора.
4.5. Базис. Разложение вектора по базису
Определение 4.5.1. Базисом пространства называется совокуп- ность максимального числа линейно независимых векторов данного про- странства.
Замечание 4.5.1. Очевидно, базисов в пространстве бесконечно много.
Определение 4.5.2. Система векторов образует базис некоторого пространства, если:
1)система линейно независима;
2)любой вектор данного пространства можно представить в виде линейной комбинации векторов данной системы.
Замечание 4.5.2. Тот факт, что векторы e1, |
e2 , ..., en образуют |
||||||
базис записывают следующим образом: { |
e1 |
, |
e2 |
, ..., |
en |
}. |
|
Определение 4.5.3. Упорядоченный |
|
набор |
коэффициентов |
||||
l1,l2 , ...,ln в разложении вектора по базису (в линейной комбинации) a = λ1e1 + λ 2 e2 + ... + λ n en называют координатами данного вектора a в
данном базисе { e1, e2 , ..., en }.
Замечание 4.5.3. |
|
|
|
В R1 |
базис образует любой вектор { |
|
|
} R1. |
||||||||||||||||||||
|
|
e |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||||
Значит, любой вектор |
|
|
|
|
|
= l1 × |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
a |
e1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Замечание 4.5.4. |
|
|
|
В R 2 |
базис образует любая пара двух некол- |
|||||||||||||||||||||||
линеарных векторов { |
|
|
|
|
} R 2 . Значит, любой вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
, |
|
|
|
|
|
= l |
|
× |
|
+ l |
|
× |
|
|
. |
||||||||||||
e |
e |
|
a |
1 |
e |
2 |
e |
2 |
||||||||||||||||||||
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||||||
23
В R 3 базис образует любая упорядоченная тройка некомпланарных векто-
ров { |
|
|
|
|
|
|
|
} R 3 . Значит, любой вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
, |
|
|
|
|
= l |
|
× |
|
+ l |
|
× |
|
|
+ l |
|
× |
|
|
. |
||
e |
e |
2 |
e |
|
a |
1 |
e |
2 |
e |
2 |
3 |
e |
3 |
||||||||||||
1 |
|
3 |
|
|
|
|
1 |
|
|
|
|
|
|
||||||||||||
|
Определение 4.5.4. Пусть в некотором пространстве задана точка |
||||||||||||||||||||||||
O. Совокупность точки и некоторого базиса называют системой коорди- |
|||||||||||||||||||||||||
нат. Точку O называют началом координат. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
Определение 4.5.5. Если длины базисных векторов равны едини- |
||||||||||||||||||||||||
це, то базис называется нормированным.
Определение 4.5.6. Если все векторы базиса взаимно перпендику- лярны, то базис называют ортогональным.
Определение 4.5.7. Базис, у которого базисные векторы нормиро- ваны и ортогональны, называют ортонормированным.
Определение 4.5.8. Система координат с ортонормированным ба-
зисом называется декартовой прямоугольной системой координат. Со-
кращенно − ДПСК. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
В ДПСК базисные векторы принято обозначать: |
|||||||||||||||||||
|
|
|
|
|
|
|
R1 – |
{ |
|
|
}, |
|
|||||||
для |
i |
||||||||||||||||||
для R2 – { |
|
|
, |
|
}, |
||||||||||||||
i |
j |
||||||||||||||||||
для R3 |
– { |
|
, |
|
, |
|
}. |
||||||||||||
i |
j |
k |
|||||||||||||||||
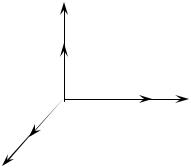
В ДПСК оси, исходящие из начала координат (рис. 7): |
|||||||||||||||||||
− в направлении вектора |
|
|
|
|
|
– |
ось абсцисс OX, |
||||||||||||
i |
|||||||||||||||||||
− в направлении вектора |
|
|
|
– |
ось ординат OY, |
||||||||||||||
|
j |
||||||||||||||||||
− в направлении вектора |
|
– |
ось аппликат OZ. |
||||||||||||||||
k |
|||||||||||||||||||
|
|
|
|
|
По Т.4.4.4 любой вектор трехмерного пространства можно предста- |
||||||||||||||||||||||||||||||||||||
вить в виде линейной комбинации векторов из базиса { |
|
|
|
, |
|
, |
|
}, т.е. для |
|||||||||||||||||||||||||||||||||
i |
j |
k |
|||||||||||||||||||||||||||||||||||||||
любого вектора |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= ax |
|
|
+ ay |
|
+az |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
i |
j |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
где |
|
|
упорядоченная тройка чисел |
(ax, |
|
ay, az) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
является |
координатами |
вектора |
|
в |
базисе |
Z |
|
|
|
|
|
|
|||||||||||||||||||||||||||||
a |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
{ |
|
, |
|
|
, |
|
|
}. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
j |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
Замечание 4.5.5. Координаты |
|
век- |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
k |
|
|
|
|
|
|
|||||||||||||||||||||||||||||
тора |
|
|
могут быть получены, как |
его проек- |
|
|
|
|
|
|
|
Y |
|||||||||||||||||||||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
ции на соответствующие базисные оси: |
|
|
|
i |
0 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
j |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
a x – проекция |
|
|
|
|
на ось ОX; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
a |
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
a y |
– |
проекция |
|
|
на ось ОY; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
a z |
– |
проекция |
|
|
на ось ОZ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
24

4.6. Выражение длины вектора через его координаты |
|||||||||
Пусть a = (a x , a y , a z ) . |
|
|
|
|
|
|
|||
Из геометрических соображений, в нашем случае, вектор является |
|||||||||
|
|
|
|
|
диагональю |
прямоугольного |
паралле- |
||
|
Y |
|
|
|
лепипеда, построенного на векторах |
||||
|
|
|
|
|
базиса {`i,`j,`k}, значит, его длина в |
||||
|
|
k |
|
|
квадрате равна сумме квадратов ли- |
||||
|
|
a |
|
нейных размеров (рис. 8). |
|
||||
i |
0 |
j |
|
Z |
a = |
a 2 + a |
2 |
+ a 2 . |
(4.6.2) |
|
|
|
|
x |
y |
z |
|
||
X |
|
|
|
|
Пример. |
|
Вычислить |
длину |
|
|
Рис. 8 |
|
|
вектора a = (5, −3,−15). |
|
||||
|
|
|
Решение. |
Воспользуемся фор- |
|||||
|
|
|
|
|
|||||
мулой (4.6.2). Будем иметь |
|
|
|
|
|
|
|||
a = 
 52 + (−3)2 + (−15)2 =
52 + (−3)2 + (−15)2 = 
 25 + 9 + 225 =
25 + 9 + 225 = 
 259 .
259 .
4.7. |
Направляющие косинусы вектора. |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Орт-вектор в координатной форме |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
равен α, |
|
и |
|
равен |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
b |
||||||||||||||||||
|
|
Пусть в ДПСК угол между векторами |
|
i |
j |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
a |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
β, |
|
|
|
равен γ ( |
|
, |
|
|
|
|
|
) = α, ( |
|
|
, |
|
|
|
|
|
|
|
) = β, |
( |
|
|
, |
|
|
|
|
) = γ. |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
k |
k |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
c |
и |
a |
i |
a |
|
j |
a |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Так как координаты вектора – это проекции его на соответствующие |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
базисные вектора, то: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos α , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аx = пр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аy=пр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
cosβ , |
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.7.1) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аz=пр |
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
cos γ . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Определение 4.7.1. |
|
|
|
Косинусы сos α, |
cos |
β, cos γ в выражении |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
(4.7.1) называют направляющими косинусами вектора |
|
. |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
a |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Если известны координаты вектора |
|
|
|
|
= (a x , a y , a z ) , то из формул (4.7.1) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
a |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
следуют формулы для вычисления направляющих косинусов: |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
сos α = |
|
|
a x |
|
, cos β = |
|
|
|
|
a y |
, cos γ = |
a z |
. |
(4.7.2) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
a |
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
= 1 |
|
|
|
0 |
= (cos α, cos β, cos γ), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Так как |
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
a |
0 |
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
то |
|
cos 2 α + cos 2 β + cos 2 γ = 1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.7.3) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
25
Замечание. Формула (4.7.3) выражает связь между направ- ляющими косинусами вектора.
4.8.Линейные операции над векторами
вкоординатной форме
Введение базиса и понятие координат вектора в некотором базисе позволяет перейти от геометрического задания вектора к заданию его чис- лами (координатами) – аналитическому способу задания вектора.
Аналитический способ задания вектора дает возможность решать задачи по геометрии, физике, механике и т.д. средствами алгебры.
По определению, координаты – коэффициенты в разложении вектора по базису {е1,е2 , е3} , тогда : a = l1 × e1 + l 2 × e2 + l3 × e3 .
Будем записывать: a = (l1,l 2 ,l3 ) .
Координаты однозначно определяют положение вектора в пространстве. Чаще всего мы будем рассматривать координаты вектора в ДПСК.
ТЕОРЕМА 4.8.1. Два вектора равны тогда и только тогда, когда равны их соответствующие координаты.
ТЕОРЕМА 4.8.2. Пусть вектор a = (l1,l 2 ,l3 ) задан координатами
в некотором базисе {е1,е2 , е3} . Тогда ka = (kl1, kl 2 , kl3 ) , где k R .
При умножении вектора на скаляр каждая координата умножается на этот скаляр.
Доказательство. По условию a = l1 × e1 + l 2 × e2 + l3 × e3 . Восполь-
зуемся свойствами линейных операций над векторами. Будем иметь: ka = k (l1 × e1 + l 2 × e2 + l3 × e ) = kl1 × e1 + kl 2 × e2 + kl3 × e3 . Тогда по опреде-
лению координат, как коэффициентов в разложении по базису, упорядо- ченный набор чисел (kl1, kl 2 , kl3 ) является координатами вектора ka ,
что и требовалось доказать.
ТЕОРЕМА 4.8.3. |
|
|
= (l1,l 2 ,l3 ) и |
|
|
= (l¢1,l¢2 ,l¢3 ) |
|||||
Пусть векторы |
|
b |
|||||||||
a |
|||||||||||
заданы координатами |
в некотором базисе { |
|
|
|
2 , |
|
3} . Тогда |
||||
е1, |
е |
е |
|||||||||
a + b = (l1 + l¢1,l 2 + l¢2 ,l3 + l¢3 ).
При сложении двух векторов их соответствующие координаты складываются.
26

Доказательство. По условию
a = l1 × e1 + l 2 × e2 + l3 × e3 и b = l¢1 × e1 + l¢2 × e2 + l¢3 × e3 .
Воспользуемся свойствами линейных операций над векторами. Бу-
дем иметь:
a + b = l1 × e1 + l 2 × e2 + l3 × e3 + l¢1 × e1 + l¢2 × e2 + l¢3 × e3 =
= (l1 + l′) × e1 + (l 2 + l′2 ) × e2 + (l3 + l′3 ) × e3 .
Тогда по определению координат, как коэффициентов в разложении по ба-
зису, упорядоченный набор чисел |
|
|
|
|
|
′ |
|
′ |
|
′ |
||||||||||||||
(l1 + l1,l 2 |
+ l 2 ,l3 |
+ l3 ) является ко- |
||||||||||||||||||||||
|
|
|
|
|
|
+ |
|
, что и требовалось доказать. |
|
|
|
|||||||||||||
ординатами вектора |
|
b |
|
|
|
|||||||||||||||||||
a |
|
|
|
|||||||||||||||||||||
ТЕОРЕМА 4.8.4. |
|
|
|
|
= (a x , a y , a z ) |
и |
|
= (bx ,by ,bz ) . |
||||||||||||||||
|
Пусть |
|
b |
|||||||||||||||||||||
|
a |
|||||||||||||||||||||||
|
|
|| |
|
, то |
|
|
a x |
= |
a y |
= |
a z |
. |
|
|
|
(4.8.1) |
||||||||
Если |
|
b |
|
|
|
|
||||||||||||||||||
a |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
bx |
|
by |
|
|
|
bz |
|
|
|
|
|
|
|||
У коллинеарных векторов координаты пропорциональны. |
||||||||||||||||||||||||
Доказательство. |
|
|
|
|
= (a x , a y , a z ) , |
|
|
= (bx ,by ,bz ) и |
||||||||||||||||
|
По условию |
|
|
b |
||||||||||||||||||||
|
a |
|||||||||||||||||||||||
|
|
|| |
|
по Т.4.2.1 $ |
k ¹0, такое, что |
|
= k × |
|
, т.е. (a x , a y , a z ) = k (bx ,by ,bz ) |
||||||||||||
|
|
b |
b |
||||||||||||||||||
a |
a |
||||||||||||||||||||
или по Т.4.9.2 (a x , a y , a z ) = (kbx , kby , kbz ) . Отсюда по Т.4.9.1 |
|||||||||||||||||||||
a x = kbx , a x = kb y , a x |
= kbz , |
a x |
= k , |
|
a y |
= k , |
a z |
= k |
a x |
= |
a y |
= |
a z |
= k , |
|||||||
|
|
|
|
|
|||||||||||||||||
|
|
|
bz |
|
|
|
|||||||||||||||
|
|
|
|
|
|
bx |
|
by |
|
|
|
bx by bz |
|||||||||
что и требовалось доказать.
Примеры.
10. Определить коллинеарные векторы среди векторов a =(1, 2, -3),
|
|
=(2, 4, 6) |
и`c =(3, 6,-9). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
Решение. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
имеем: |
1 |
|
= |
2 |
¹ -3 . |
|
|
|
|
. |
||||||||||||||||||||||||||||||||||||
|
|
|
Для координат векторов |
|
|
|
|
|
|
и |
b |
|
|
b |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
a |
a |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
4 |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
Для координат векторов |
|
|
и |
|
|
|
имеем: |
1 |
= |
2 |
= |
|
-3 |
|
. |
|
|
|
|
|
|
|
. |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
a |
c |
a |
c |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 6 |
|
|
|
-9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
20. Найти вектор |
|
-¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
, где |
|
|
|
|
= (2, 4, −8) . |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
такой, что |
|
|
|
|
|
|
|
|
|
21 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
x |
a |
x |
|
|
|
a |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
Решение. |
По условию |
|
-¯ |
|
(k<0) |
|
= ka |
|
|
|
= (2k, 4k, −8k ) . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
x |
a |
x |
x |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
= |
4k 2 +16k 2 + 64k 2 или |
|
|
|
|
|
|
|
= |
|
84k 2 . Поскольку |
|
|
|
|
= |
|
, то |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
Тогда |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
21 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
x |
|
|
x |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
2 |
|
|
k |
|
= |
|
|
|
и |
|
k |
|
= |
1 |
. Из условия имеем k < 0 k = - |
1 |
|
|
|
=(-1, -2, 4). |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
21 |
|
21 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
x |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
27
Упражнение. |
Для вектора |
|
= (2, −3,6) найти вектор |
|
|
|
|
|
такой, |
|||||||||
a |
x |
a |
||||||||||||||||
что 0 < ( |
|
, Oy) < p , |
|
|
|
|
|
= 21. |
|
|
|
|
||||||
|
|
|
|
|||||||||||||||
a |
x |
|||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
4.9. Переход от одного базиса к другому |
||||||||||||||||
ТЕОРЕМА 4.9.1. |
|
|
Пусть заданы векторы: |
|
(x1, y1, z1); |
|
(x2, y2, z2); |
|||||||||||
|
|
|
b |
|||||||||||||||
|
|
a |
||||||||||||||||
c (x3, y3, z3) в некотором базисе. Система векторов {a,b ,c} образует базис
|
x1 |
x2 |
x3 |
|
тогда и только тогда, когда D = |
y1 |
y2 |
y3 |
¹ 0 . |
|
z1 |
z2 |
z3 |
|
Задача. Пусть заданы векторы: a (x1, y1, z1); b (x2, y2, z2); c (x3, y3, z3); d (m, n, p) и система векторов {a,b ,c} образует базис. Найти координаты
вектора |
d в этом базисе. |
|
|
|
|
|
||||||||||||||
|
|
|
|
Решение. Чтобы определить координаты вектора |
|
|
|
|||||||||||||
|
|
|
|
|
d |
в базисе |
||||||||||||||
{ |
|
, |
|
, |
|
} |
|
|
|
|
|
|
|
|
|
вектора |
|
по |
||
|
b |
необходимо найти коэффициенты в разложении |
d |
|||||||||||||||||
a |
c |
|||||||||||||||||||
этому базису: |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
= l1 |
|
+ l 2 |
|
+ l3 |
|
. |
(4.9.1) |
||||
|
|
|
|
|
|
|
d |
b |
||||||||||||
|
|
|
|
|
|
|
|
a |
c |
|||||||||||
Используя теоремы об умножении вектора на число, сложения век- торов, равенстве векторов перейдем от векторного равенства (4.10.1) к ко-
ординатным равенствам: |
|
(m, |
n, p) |
= (l1x1+ l2x2+l3x3; |
l1y1+ |
l2y2+l3y3; |
|||||||||||||||||||||
l1z1+l2z2+l3z3). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
m = l1x1 + l2 x2 + l |
3x3, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
+ l2 y2 |
+ l |
3 y3, |
получилась система |
|
|
||||||||||||||||||||
|
n = l1 y1 |
трех |
линейных |
||||||||||||||||||||||||
|
|
+ l 2 z 2 |
+ l3z3; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
p = l1z1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
уравнений с тремя неизвестными. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Так как, по условию, система векторов { |
|
, |
|
, |
|
} |
образует базис, то |
|||||||||||||||||||
|
b |
||||||||||||||||||||||||||
a |
c |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
D = |
|
x1 |
x2 |
x3 |
|
¹ 0 , |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
y1 |
y2 |
y3 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z1 |
z2 |
z3 |
|
|
|
|
|
||||||
система имеет единственное решение (l1, l2, l3) |
координаты век- |
||||||||||||||||||||||||||
тора |
|
в новом базисе { |
|
, |
|
, |
|
} |
можно определить. |
|
|
|
|||||||||||||||
d |
b |
|
|
|
|||||||||||||||||||||||
a |
c |
|
|
|
|||||||||||||||||||||||
28

4.10. Задание вектора двумя точками
Определение 4.10.1. Радиус-вектором точки данного простран- ства называют вектор, соединяющий начало системы координат и данную точку.
OM 1 – радиус-вектор точки М1 (рис. 9).
За координаты точки данного пространства принимают координаты ее радиус-вектора.
Задача. Пусть М1М 2 задан через точки М1 (x1, y1, z1) и M2 (x2, y2, z2).
Определить координаты вектора М1М 2 .
Z Z
M2(x2, y2, z2)
M1
|
|
|
|
M1(x1, y1, z1) |
0 |
Y |
|
|
|
X |
X |
0 |
Y |
|
Рис. 9 |
|
|
|
Рис. 10 |
Так как |
М1 и М2 |
заданы |
своими |
координатами, то известны |
OM 1 (x1, y1, z1) и OM 2 (x2, y2, z2). По правилу вычитания векторов имеем -
М1М 2 = OM 2 - OM 1 , тогда по теореме сложения векторов в координатной
форме и умножения их на число М1М 2 = (x2-x1; y2-y1; z2-z1) (рис. 10). Замечание. Длина вектора
М1М 2 = 
 (x2 - x1) 2 + ( y2 - y1) 2 + (z2 - z1) 2 .
(x2 - x1) 2 + ( y2 - y1) 2 + (z2 - z1) 2 .
4.11. Скалярное произведение двух векторов
Определение 4.11.1. Скалярным произведением двух векторов на- зывается число, равное произведению длин этих векторов на косинус угла между ними.
|
|
|
|
( |
|
, |
|
)= |
|
|
|
|
|
|
|
= |
|
|
|
|
|
× |
|
|
|
|
|
× cos ( |
|
|
, |
|
). |
|
|
|
(4.11.1) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
b |
|
|
|
|
b |
|
|
|
|
b |
b |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
a |
a |
a |
a |
||||||||||||||||||||||||||||||||||||||||||||||||
Замечание 4.11.1. Так как проекция вектора |
|
|
на вектор |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
b |
по |
||||||||||||||||||||||||||||||||||||||||||||||||||||
a |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
cos ( |
|
, |
|
|
|
), проекция вектора |
|
|
на вектор |
|
|
|
|||||||||||||||||||||||||||||||||||||
определению равна |
|
a |
|
|
a |
b |
b |
a |
|
по |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
cos (a, b), то |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
определению равна |
b |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
`а×`b= |
|
а |
|
× пр |
|
|
b |
= |
|
b |
|
× пр |
|
|
a |
. |
(4.11.2) |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
b |
|||||||||||||||||||||||||||||||||||||||||
29

Алгебраические свойства скалярного произведения
ТЕОРЕМА 4.11.1. |
|
× |
|
|
= |
|
× |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
b |
b |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
a |
a |
× cos( |
), |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
× |
|
|
|
|
= |
|
|
|
|
|
|
|
|
× |
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
Доказательство. Имеем |
|
|
|
|
|
|
|
a |
b |
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
b |
b |
||||||||||||||||||||||||||||||||||||||||||||||||||||
a |
a |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
|
|
|
|
|
|
|
|
|
|
× |
|
|
|
× cos(a, b) |
|
× |
|
= |
|
× |
|
. |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
a |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
b |
b |
b |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
a |
a |
a |
||||||||||||||||||||||||||||||||||||||||||||
ТЕОРЕМА 4.11.2. |
|
(l |
|
)× |
|
= |
|
×(l |
|
)=l( |
|
× |
|
). |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
b |
b |
b |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
a |
a |
a |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
Доказательство. На основании формулы (4.12.2) и свойств проек- ции вектора на вектор получим:
(l a )×b = b × прb (la)=l b × прb a =l( a ×b ). Аналогично,
a × прa (lb) = l a × прa b =l( a ×b ) (l a )×b = a ×(lb )=l( a × b ).
ТЕОРЕМА 4.11.3. a × (`b+c ) = a ×b + a ×c .
Упражнение. Доказать самостоятельно.
Вывод. Из Т.4.11.1 - Т.4.11.3 следует, что при раскрытии скобок в скалярном произведении поступают, как при умножении многочленов.
Геометрические свойства скалярного произведения
ТЕОРЕМА 4.11.4. (Условие перпендикулярности двух векторов). a ^ b Û a ×b = 0 .
Доказательство. ) Пусть a ^ b cos (a, b ) = cos900 = 0 a ×b = a × b cos(a , b )=0.
Ü) Пусть a ×b = 0 , т.е. a × b × cos (a , b )=0. Тогда
1) |
|
|
|
|
|
= 0, то |
|
|
= |
|
|
|
|
× |
|
|
|
= 0 |
|
^ |
|
|
|
. |
|
|
|
|
|
|
|||||||||||
если |
|
|
|
|
|
|
0 |
|
b |
b |
|||||||||||||||||||||||||||||||
a |
a |
a |
a |
||||||||||||||||||||||||||||||||||||||
2) |
|
|
|
= 0 , то |
|
= |
|
|
|
× |
|
|
|
= 0 |
|
^ |
|
|
. |
|
|
||||||||||||||||||||
если |
|
|
b |
b |
0 |
a |
b |
a |
b |
||||||||||||||||||||||||||||||||
3) |
если cos ( |
|
, |
|
) = 0 , то ( |
|
, |
|
) = 900 |
|
^ |
|
. |
||||||||||||||||||||||||||||
|
b |
b |
b |
||||||||||||||||||||||||||||||||||||||
a |
a |
a |
|||||||||||||||||||||||||||||||||||||||
ТЕОРЕМА 4.11.5. Скалярный квадрат вектора a 2 , скалярное произведение вектора на себя, равен квадрату своего модуля.
Доказательство. Очевидно a 2 = a 
 a cos 00 = a 2 :
a cos 00 = a 2 :
|
|
2 = |
|
|
|
|
2 . |
(4.11.3) |
|
|
|
|
|
||||
a |
a |
30