

Условия применимости метода прогонки
В
процессе вычисления величин
![]() и
и![]() по формулам (3.3.9) происходит деление на
величины
по формулам (3.3.9) происходит деление на
величины![]() ,
которые могут обращаться в ноль. В этом
случае метод прогонки применять нельзя.
Поэтому необходимо знать и предварительно
проверять условия, при которых можно
использовать этот метод. Достаточные
условия применимости метода прогонки
сформулируем в виде теоремы.
,
которые могут обращаться в ноль. В этом
случае метод прогонки применять нельзя.
Поэтому необходимо знать и предварительно
проверять условия, при которых можно
использовать этот метод. Достаточные
условия применимости метода прогонки
сформулируем в виде теоремы.
Теорема 1. Если
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,![]() ,
,![]() ,
,
то
![]() для
для![]() и метод прогонки можно применять.
и метод прогонки можно применять.
Доказательство. Неравенства длядокажем методом математической индукции.. Пусть при некоторомm выполняется неравенство , тогда
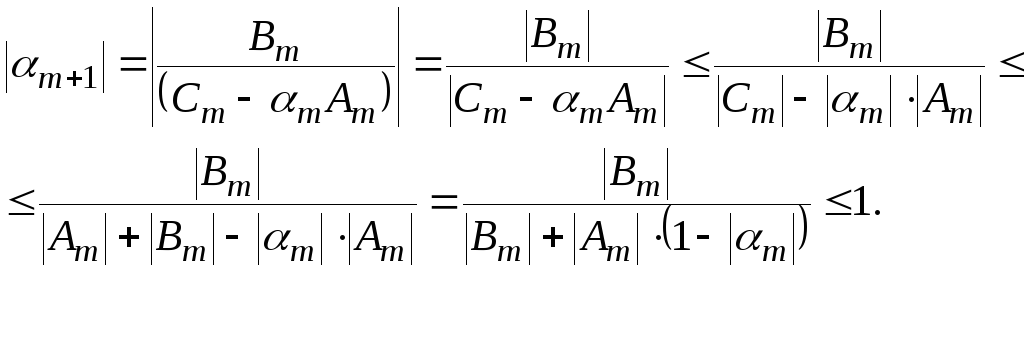
Неравенство
доказано. Осталось доказать, что![]() при
при![]() .
Зафиксируем любое из целых значений
.
Зафиксируем любое из целых значений![]() и рассмотрим разность:
и рассмотрим разность:
![]()
Отсюда
![]() .
И наконец, рассмотрим два оставшихся
случая:
.
И наконец, рассмотрим два оставшихся
случая:![]() ,
так как
,
так как![]() .
.![]()
![]() Теорема полностью доказана.
Теорема полностью доказана.
3.4. Метод простой итерации для линейных систем
Метод простой итерации применяется для решения линейных систем нестандартного вида, отличного от (3.1.1):
![]() .
(3.4.1)
.
(3.4.1)
Здесь
C
– заданная матрица порядка n,
d
– заданный столбец с n
координатами, а x
– искомый столбец. Но, очевидно, любую
систему стандартного вида
![]() можно многими разными способами привести
к равносильной системе вида (3.4.1) и
наоборот. Будем решать систему (3.4.1) в
предположении, что она имеет единственное
решение.
можно многими разными способами привести
к равносильной системе вида (3.4.1) и
наоборот. Будем решать систему (3.4.1) в
предположении, что она имеет единственное
решение.
Метод простой итерации основан на методе последовательных приближений и принципе сжимающих отображений (см. параграф 1.11 ). Введем отображение
 .
(3.4.2)
.
(3.4.2)
Тогда система (3.4.1) примет вид
![]() .
(3.4.3)
.
(3.4.3)
Аргумент
x
и значение y
введенного отображения F
представляют собой векторы с n
координатами и, следовательно, принадлежат
пространству
![]() ,
где можно ввести, по крайней мере, три
метрики:
,
где можно ввести, по крайней мере, три
метрики:![]() ,
,![]() ,
,![]() .
.
Здесь
![]() и
и![]() – координатами векторовx
и y.
Проверьте самостоятельно, что введенные
функции
– координатами векторовx
и y.
Проверьте самостоятельно, что введенные
функции
![]() ,
,![]() и
и
![]() удовлетворяют
всем аксиомам метрики.
Таким образом, мы получаем три метрических
пространства:
удовлетворяют
всем аксиомам метрики.
Таким образом, мы получаем три метрических
пространства:
![]() ,
,![]() ,
,![]() .
Можно доказать, чтовсе
эти метрические пространства являются
полными.
.
Можно доказать, чтовсе
эти метрические пространства являются
полными.
Обозначим
через
![]() любую из этих метрик, а через
любую из этих метрик, а через![]() любое из введенных метрических
пространств. Точное решение системы
(3.4.1) (и уравнения (3.4.3)) обозначим
любое из введенных метрических
пространств. Точное решение системы
(3.4.1) (и уравнения (3.4.3)) обозначим![]() .Будем искать
приближенное решение системы
(3.4.1),
.Будем искать
приближенное решение системы
(3.4.1),
![]() ,абсолютная
погрешность которого не превышает
заданного положительного числа
,абсолютная
погрешность которого не превышает
заданного положительного числа
![]() :
:
![]() .
(3.4.4)
.
(3.4.4)
Точное
решение системы,
![]() представляет собой также неподвижную
точку отображенияF.
Поэтому для решения этой задачи можно
воспользоваться теоремой о сжимающем
отображении (см. теорему из параграфа
1.11). Так как метрическое пространство
представляет собой также неподвижную
точку отображенияF.
Поэтому для решения этой задачи можно
воспользоваться теоремой о сжимающем
отображении (см. теорему из параграфа
1.11). Так как метрическое пространство
![]() является полным,для
выполнения условий указанной теоремы
(принципа сжимающих отображений)
достаточно, чтобы отображение
F
было сжимающим
в метрическом
пространстве
является полным,для
выполнения условий указанной теоремы
(принципа сжимающих отображений)
достаточно, чтобы отображение
F
было сжимающим
в метрическом
пространстве
![]() .В этом
случае, согласно принципу сжимающих
отображений, последовательность столбцов
.В этом
случае, согласно принципу сжимающих
отображений, последовательность столбцов
![]() ,
которая получается по рекуррентной
формуле
,
которая получается по рекуррентной
формуле
![]() , k=0,
1, … (3.4.5)
, k=0,
1, … (3.4.5)
при любом
начальном приближении
![]() будет сходиться к неподвижной точке
отображенияF,
совпадающей с точным решением нашей
системы
будет сходиться к неподвижной точке
отображенияF,
совпадающей с точным решением нашей
системы
![]() :
:
![]() .
(3.4.6)
.
(3.4.6)
Кроме того, из выполнения неравенства
![]() (3.4.7)
(3.4.7)
следует выполнение неравенства
![]() .
(3.4.8)
.
(3.4.8)
Здесь
![]()
коэффициент сжатия отображения F
в метрическом пространстве
коэффициент сжатия отображения F
в метрическом пространстве
![]() .
Поэтому, как только неравенство (3.4.7)
будет выполнено, в качестве искомого
приближенного решения системы можно
выбрать
.
Поэтому, как только неравенство (3.4.7)
будет выполнено, в качестве искомого
приближенного решения системы можно
выбрать
![]() ,
и записать алгоритм решения системы
(3.4.1) методом простой итерации.
,
и записать алгоритм решения системы
(3.4.1) методом простой итерации.
Алгоритм.
В качестве начального приближения
обычно выбирают вектор d:
![]() .
Далее по формуле (3.4.5) производится
последовательное вычисление
.
Далее по формуле (3.4.5) производится
последовательное вычисление![]() и на каждом шаге этого цикла (при каждом
значении
и на каждом шаге этого цикла (при каждом
значении![]() )
проверяется выполнение неравенства
(3.4.7). И как только это неравенство
выполнится, последний вычисленный член
последовательности
)
проверяется выполнение неравенства
(3.4.7). И как только это неравенство
выполнится, последний вычисленный член
последовательности![]() даст нам искомое приближенное решение
системы.
даст нам искомое приближенное решение
системы.
Но
использовать этот алгоритм можно только
тогда, когда отображение F
является сжимающим в
![]() .
А это
выполняется далеко не всегда. Условия,
при выполнении которых отображение F
будет сжимающим в
.
А это
выполняется далеко не всегда. Условия,
при выполнении которых отображение F
будет сжимающим в![]() ,
приведены в следующей теореме.
,
приведены в следующей теореме.