

Характеристики трансформатора
Для оценки гидротрансформатора применяют различные характеристики, основные из которых: внешняя характеристика, характеристики “входа”, “выхода” и исходная характеристика.
Внешняя – представляет собой зависимость изменения моментов насоса Мн и турбины Мт от частоты вращения вала турбины nт при постоянной частоте вращения насоса nн -рисунки 47б, 49.
Кроме того, на нее наносится кривая изменения КПД гидротрансформатора ηгт. На оси ординат могут быть отложены значения силового передаточного числа ĩ=Мт / Мн, которое часто называют коэффициентом трансформации К.
Из графика видно, что ĩ достигает наибольшего значения при трогании с места, т.е. nт=0. Значение ηгт при этом падает до нуля. В существующих гидротрансформаторах ĩ=4…5. По мере увеличения частоты вращения значение ĩ уменьшается и при nт/nн≈0.6…0.7 становится равным 1, а затем и меньше ее. Момент на валу турбины становится меньше момента насоса и, следовательно, использование гидротрансформатора целесообразно в интервале от ĩmax до ĩ=1. В точке, где ĩ=1 происходит изменение знака момента реактивного колеса, т. к. трансформатор из увеличителя момента превращается в его уменьшитель. Это вызвано значительным увеличением частоты вращения турбины, соответствующим ростом потерь и резким падением КПД гидротрансформатора. Поэтому дальнейшая работа в режиме гидротрансформатора явно нецелесообразна и во многих конструкциях трансформатор переводят в режим работы гидромуфты. С этой целью реактивное колесо устанавливается на муфте свободного хода. При изменении знака момента реактивное колесо увлекается потоком жидкости и гидротрансформатор автоматически превращается в гидромуфту. Такие гидротрансформаторы называются комплексными - рисунок 47-б.
КПД гидротрансформатора как видно из внешней характеристики, резко убывает по обе стороны от ηmax, который у большинства гидротрансформаторов равен ηmax=nт/nн=0.35…0.4.
Параболический характер изменения КПД – органическая особенность гидротрансформатора, связанная с изменением напора турбины по квадратичной параболе при постоянном расходе жидкости. Отсюда невысокое значение ηср во всем рабочем диапазоне. Чтобы гидротрансформатор длительное время не работал при низком η диапазон использования гидротрансформатора сужают. Для обеспечения необходимого крутящего момента вводят дополнительно 2-х или 3-х ступенчатую коробку передач (гидромеханические передачи).
У прозрачных гидротрансформаторов nе зависит не только от подачи топлива, но и от передаточного отношения гидротрансформатора.
У непрозрачных гидротрансформаторов nе зависит только от подачи топлива. Изменение сопротивления движению для прозрачных гидротрансформаторов будет отражаться на nе и соответственно на Мн, т.к. изменяется λн. Тогда характеристика входа (нагрузочная) представит собой серию квадратичных парабол. Поэтому при больших Рf двигатель будет развивать высокие Ме и динамические качества машины несколько улучшаются.
У непрозрачных же гидротрансформаторов зависимость Мн=f (nн) выражается только одной квадратичной параболой, точка пересечения кото рой с кривой Ме определяет неизменный режим работы двигателя при данной подаче топлива.
Зависимость, показывающая изменение момента Мн от частоты вращения насоса nн при различных передаточных отношениях, называется характеристикой “входа”.
Характеристика “выхода” – зависимость изменения момента на ведомом валу Мт от частоты вращения этого вала nт при неизменной частоте вращения ведущего вала гидротрансформатора.

Рисунок 49 Кривые изменения моментов на насосном колесе прозрачного(непрозрачного)
гидротрансформатора
Для оценки не отдельного конкретного образца гидротрансформаторов, а типа гидротрансформаторов независимо от их габаритов применяется исходная или безразмерная характеристика, представляющая зависимость коэффициента трансформации К, коэффициентов момента насоса λн и турбины λт и КПД η от величины, обратной передаточному числу гидротрансформатора 1/i.
Из представленных характеристик видно, что гидротрансформатор позволяет непрерывно изменять момент на валу турбины в определенных пределах – от максимального значения до нуля – в то время как момент насоса изменяется незначительно в зависимости от nт. КПД гидротрансформатора изменяется по кривой с максимальным значением в некоторой средней точке. По обе стороны от этой точки КПД уменьшается до нуля (в основном из-за ударных потерь жидкости о лопатки рабочих колес гидротрансформатора). Коэффициент К достигает своего максимума при трогании (nт=0) и снижается до нуля с увеличением nт.
Прозрачность гидротрансформатора – способность гидротрансформа тора изменять нагрузку на валу двигателя (насоса) в зависимости от нагрузки на ведомом валу.
По степени воздействия внешней нагрузки на работу двигателя гидротрансформаторы делятся на прозрачные и непрозрачные.
Прозрачными называются гидротрансформаторы, у которых, как и у механических передач, внешняя нагрузка непосредственно воздействует на работу двигателя. Возрастание нагрузки на ведомом валу вызывает снижение скорости движения машины, а, следовательно, и снижение частоты вращения вала двигателя и наоборот.
Непрозрачный гидротрансформатор как бы изолирует двигатель от влияния внешней нагрузки, действующей на машину. Частота вращения двигателя определяется только положением рейки топливного насоса (дросселя).
Степень прозрачности не зависит от условий и режима работы. Для данного типа гидротрансформаторов эта величина постоянная.
Пример внешней характеристики гидротрансформаторов с различной степенью прозрачности представлен на рисунке 49.
В качестве оценочного параметра степени прозрачности существующего гидротрансформатора используется коэффициент прозрачности П′, который равен отношению максимального момента на ведущем валу гидротрансформатора Мнmax к моменту Мнmin, когда моменты на ведущем и ведомом валах гидротрансформатора равны (Мн=Мт)при постоянной скорости вращения ведущего вала nн=const:
П′=Мнmax/Мнmin (ĩ =1) (180)
При коэффициенте прозрачности П′ > 1 ГДТ принято считать прозрачным, а при П′=1 - непрозрачным (П′ < 1 – обратная прозрачность).
Использующиеся на тракторах ГДТ имеют обычно коэффициент прозрачности П′=1.2…2.
“Непрозрачные” гидротрансформаторы широко применяются на судах и тепловозах, где ДВС в основном работает на одном постоянном режиме.
“Прозрачные” – на автомобилях, тягачах, танках. Они позволяют использовать приспособляемость двигателя, уменьшить количество тепла, идущего на нагрев жидкости.
“Прозрачность” гидротрансформатора обеспечивается приданием определенной формы лопаткам рабочих колес, а также установкой турбины в круге циркуляции перед входом в насос.
РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНЫХ МАШИН
(самоподготовка)
Рулевое управление служит для изменения направления движения. Помимо общих требований, оно должно: обеспечивать хорошую маневренность; предотвращать проскальзывание колес при повороте; препятствовать передаче толчков на рулевое колесо; обеспечивать устойчивость прямолинейного движения трактора (машины).
Рулевое управление классифицируется по различным признакам:
1.По методу поворота: с помощью направляющих колес; методом торможения ведущих колес.
2.По числу управляемых колес: с одним, двумя и всеми управляемыми колесами одного из бортов.
3.По конструкции механизмов рулевого управления.
У всех автомобилей направление движения обычно изменяется поворотом управляемых колес. У автомобиля высокой проходимости (8х8) ведущие колеса являются и управляемыми. Однако для простоты привода к ведущим колесам обычно делают управляемой одну пару колес.
Поворот большеколесных тягачей осуществляют двумя путями:
Все колеса неуправляемые, поворот всем бортом (как у гусеничных машин). Недостатки – интенсивный износ шин; большие затраты мощности; пониженная устойчивость против заноса и др.
Колеса неуправляемые, но рама “ломающаяся” (К-700, Т-125, Т-210 и др).
Недостатки – низкая поперечная устойчивость (ц.т. смещается относительно продольной оси), хуже продольная устойчивость.
Передаваемая рамой к оси колес толкающая сила Р может быть разложена на составляющие Рх и Ру.
Условие управляемости, т.е. движение автомобиля в заданном направлении без бокового скольжения колес, возможно, если:
Р у=Р∙Sinα≤Pφ=φ∙
Zк
у=Р∙Sinα≤Pφ=φ∙
Zк
Рx=Р∙Cosα≥Pf=f∙Zк , (181)
где Pφ=φ∙Zк–сила сопротивления боковому сдвигу.
Подставив значения Pφ и Pf, получим условие управляемости при повороте: f∙tgα ≤ φ (182)
 Схема
поворота передних управляемых, но не
ведущих колес - рисунок 50.
Схема
поворота передних управляемых, но не
ведущих колес - рисунок 50.
Рисунок 50 Схема поворота передних управляемых не ведущих колес
Так как углы поворота управляемых колес не превышают 35…45о (tgα = 1), а коэффициент φ на плотных грунтах намного больше f, то условие управляемости выполняется с запасом, а на слабых грунтах (песок, снег) управляемость ухудшается.
КИНЕМАТИКА ПОВОРОТА И УСТАНОВКА УПРАВЛЯЕМЫХ КОЛЕС
 Чтобы направляющие
колеса при повороте катились без
проскальзывания, необходимо чтобы
внутреннее колесо поворачивалось на
больший угол, чем внешнее.
Чтобы направляющие
колеса при повороте катились без
проскальзывания, необходимо чтобы
внутреннее колесо поворачивалось на
больший угол, чем внешнее.
Рисунок 51 Схема рулевого управления автомобилем: 1,5 - поворотные цапфы; 2 - рычаг поворот ной цапфы; 3 - балка переднего моста; 4 - рычаг, связанный с цапфой; 6 - поперечная рулевая тяга; 7 - продольная рулевая тяга; 8 - рулевая сошка; 9 - вал передачи; 10 - передача; 11 - рулевое колесо; 12 – рычаг
Связь между этими углами и параметрами машины: Сtgα=OC/L, Ctgβ = ОД/L,
Откуда Ctgα - Ctgβ = К/L (183)
Это соотношение углов поддерживается рулевой трапецией. Угол поворота управляемых колес определяет маневренность автомобиля. Чем меньше радиус траектории, описываемой внешним колесом, т.е. чем больше угол α, тем меньше площадь для поворота машины. Из рисунка 49 следует Rн=L / Sinα.
Для снижения усилия прилагаемого водителем к рулевому колесу при повороте нагруженных колес в механизме рулевого управления (рисунок 51) осуществляется большое передаточное число:
iру=
![]() /
/![]() , (183а)
, (183а)
где ![]() – угол поворота рулевого колеса;
– угол поворота рулевого колеса;
![]() – угол поворота управляемого колеса.
– угол поворота управляемого колеса.
Это кинематическое передаточное число создается червячной или иной передачей в рулевом механизме, а также соотношением плеч рычагов в рулевом приводе (рисунок 51). У грузовых автомобилей при увеличении iру усилие в рулевом колесе уменьшается, но при этом растет угол поворота и время, для полного поворота управляемых колес. На быстроходных автомобилях нельзя делать большим iру. На тихоходных автомобилях допускают до 2…2.5 оборота штурвала на полный угол поворота колес. Однако и здесь утомляемость очень велика, поэтому на такие автомобили вводят усилители рулевого управления.
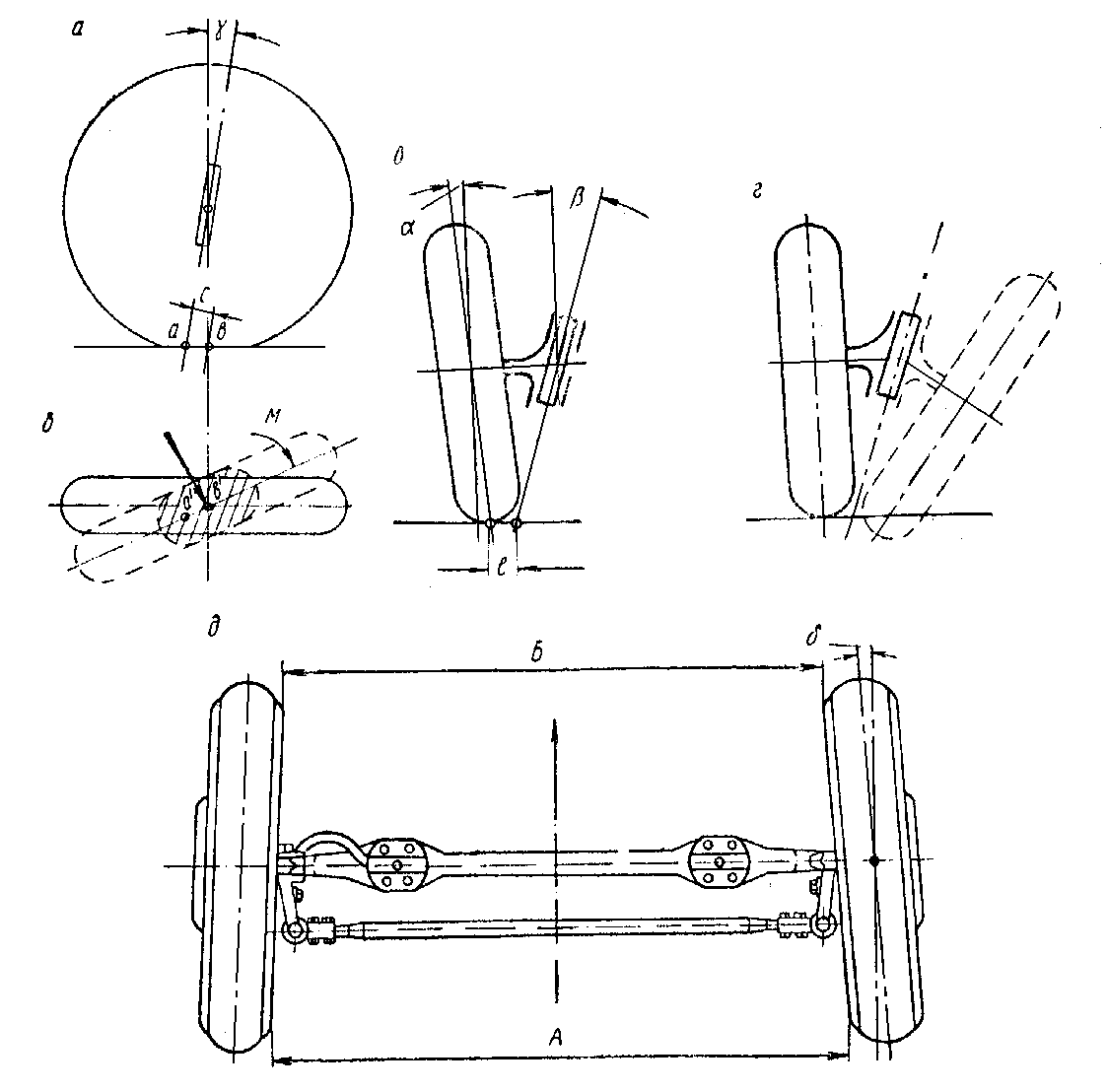
Для облегчения управления и лучшей устойчивости движения автомобиля оси шкворней поворотных цапф устанавливают наклонно в продольной плоскости (рисунок 52-а).
Этот наклон осей шкворней, являющихся осями поворота колес способствует их стабилизации – колесо стремится сохранит положение прямолинейного движения и возвращаться к нему из состояния поворота.
Наклон на угол γ смещает точку пересечения оси шкворня с поверхностью дороги вперед, поэтому равнодействующая боковых сил (реакций) создает момент, возвращающий колесо в исходное положение.
Боковой
наклон шкворня (угол
![]() )
также способствует стабилизации колес
- рисунок 52-б. Повернем мысленно колесо
на 180о.
Так как колесо поворачивается вокруг
оси шкворня, то нижние точки должны бы
врезаться в грунт. В действительности
приподнимается (на плотных грунтах)
передняя ось автомобиля.
)
также способствует стабилизации колес
- рисунок 52-б. Повернем мысленно колесо
на 180о.
Так как колесо поворачивается вокруг
оси шкворня, то нижние точки должны бы
врезаться в грунт. В действительности
приподнимается (на плотных грунтах)
передняя ось автомобиля.
Таким образом, при повороте колеса совершается работа по подъему веса передней части машины, но зато эта сила веса повернет колесо обратно, как только водитель отпустит рулевое колесо. Боковой наклон шкворня уменьшает расстояние l, поэтому момент, необходимый для поворота, снижается.
Управляемые колеса автомобиля также устанавливают под некоторым углом α к вертикальной плоскости – называемым углом развала - рисунок 52-б, а угол δ образуемый с продольной плоскостью называется углом схода – рисунок 52 д.
Введение угла α позволяет избежать отрыва колес от ступицы, но в этом случае колеса стремятся катиться по расходящимся кривым – это ведет к скольжению и повышенному износу шин. Для компенсации этого вводят угол схода δ, благодаря которому колеса стремятся сойтись на продольной оси симметрии автомобиля.
Сопротивление повороту управляемых колес складывается из момента сопротивления скольжения пятна контакта шины с грунтом и момента сопротивления обкатке колеса вокруг оси шкворня.
Максимальное усилие, которое прикладывается к штурвалу при повороте управляемых колес на месте:
Pmax=Mc/(R∙iру∙ηру) , (184)
где Mc – суммарный момент сопротивления повороту управляемых колес;
R – радиус рулевого колеса;
iру=i′∙i″ - произведение передаточного числа рулевого механизма на i рулевого привода;
ηру – КПД рулевого управления (при передаче усилия от рулевого колеса к цапфе управляемого колеса).
|
|
|
Рисунок 52 Схема установки управляемых колес: а угол развала колес; б угол схождения колес; в угол поперечного наклона шкворня; г угол продольного наклона шкворня. |
Для определения Мс предложено много формул. Для практических расчетов обычно используется:
Мс=(G3к/Рш)![]() (φ/3)
, (185)
(φ/3)
, (185)
где φ – коэффициент сопротивления повороту колес, φ=0.8…1.0;
Gк – нагрузка приходящаяся на управляемые колеса;
Рш – давление воздуха в баллонах.
При выводе формулы принимается, что форма отпечатка баллона – круг и центр поворота совпадает с центром этого круга.