

Поперечная устойчивость
Назовем
предельным статическим углом
![]() попе речного уклона наибольший угол
уклона, на котором машина может стоять,
не опрокидываясь набок и не сползая
вниз. Угол поперечного уклона, на котором
машина начинает опрокидываться,
попе речного уклона наибольший угол
уклона, на котором машина может стоять,
не опрокидываясь набок и не сползая
вниз. Угол поперечного уклона, на котором
машина начинает опрокидываться,
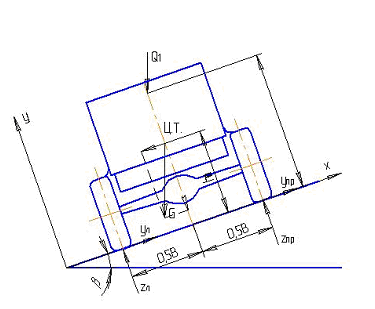 Рисунок
16 Схема сил, действующих на машину на
поперечном уклоне
Рисунок
16 Схема сил, действующих на машину на
поперечном уклоне
обозначим βmax, а угол, на котором она начинает сползать – βсц. Изобразим колесную машину, стоящую на предельном поперечном уклоне - рисунок 16. Величина угла βmax определяется из условия, что опрокидывание начнется, когда нормальная реакция zпр будет равна нулю.
Написав уравнение относительно возможной оси опрокидывания О, получим:
G∙h∙Sinβmax - G∙(B/2)∙Cosβmax = 0 (109)
Откуда tgβmax=B/(2h) = ηпоп , (110)
где ηпоп–коэффициент поперечной устойчивости.
При выводе последнего равенства было допущено, что центр тяжести машины находится в продольной плоскости симметрии, не учитывалось также некоторое смещение ц.т., происходящее под влиянием добавочных прогибов рессор подвески, возникающих при стоянке на поперечном уклоне. У гусеничных тракторов и тракторов с металлическими колесами осью опрокидывания при достаточной твердости почвы являются наружные боковые кромки ходовых органов.
В этом случае: tgβmax=(B+b) / (2h) (111)
Определим статический угол поперечного уклона βсц, на котором возможно сползание машины.
Заменив угол βmax на βсц на рисунке 16 и составив уравнение проекций всех сил, действующих в поперечной плоскости на ось, параллельную поверхности пути, получим: G∙Sinβсц=У1+У2=y(z1+z2)=y∙G∙Cosβсц , (112)
где Ул и Упр – боковые реакции дороги на колеса;
zл ,zпр нормальные реакции дороги на колеса;
y – коэффициент поперечного сцепления шин с дорогой в боковом направлении.
Из приведенного уравнения проекций следует:
tgβсц = y (113)
Величина коэффициента y зависит от механических свойств дороги и конструкции ходовых органов. Известно, что автомобили наиболее подвержены боковому скольжению на обледенелых дорогах, на которых коэффициент y резко снижается. Экспериментально установлено, что гусеницы обычной конструкции надежно удерживают трактор от сползания на крутизне склонов ≈ до 16о, на более крутых склонах необходимы гусеницы с почвозацепами особой формы, имеющие развитые боковые поверхности. Практически опрокидывание без бокового скольжения бывает очень редко.
Устойчивость при повороте
В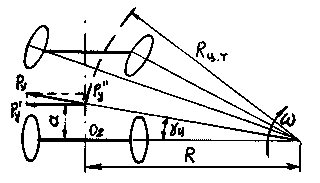 о
время движения на трактор и автомобиль
могут действовать и другие боковые
силы, стремящиеся нарушить его поперечную
устойчивость. Из них весьма важное
значение имеют инерционные силы,
возникающие при повороте.
о
время движения на трактор и автомобиль
могут действовать и другие боковые
силы, стремящиеся нарушить его поперечную
устойчивость. Из них весьма важное
значение имеют инерционные силы,
возникающие при повороте.
Рисунок 17 Схема сил, действующих на автомобиль при повороте
Рассмотрим поворот колесной машины на горизонтальном участке с ν = const и R = const - рисунок 17. Примем, что центр поворота О расположен в точке пересечения геометрических осей всех колес машины. При повороте возникает результирующая центробежная сила Ру, приложенная к центу тяжести машины и направленная по радиусу от центра поворота:
Ру=(G∙ω2∙Rцт) / g , (114)
где ω – угловая скорость вращения машины;
Rцт – радиус поворота цента тяжести.
Разложим силу Ру на две составляющие: продольная вызывает перераспределение нормальных нагрузок между передними и задними колесами, поперечная составляющая стремится опрокинуть машину - Р′у. Величина Р′у определится: Р′у=Ру∙Cosγц=G∙ω2∙Rцт ∙Cosγц /g =G∙ν2/(g∙R) , (115)
где γц – угол наклона результирующей силы Ру;
ν – средняя поступательная скорость при повороте;
 R
=(Rцт
∙Cosγц)
- минимальное расстояние от центра
поворота до продоль
R
=(Rцт
∙Cosγц)
- минимальное расстояние от центра
поворота до продоль
ной оси машины, (ωк=υ / rд.).
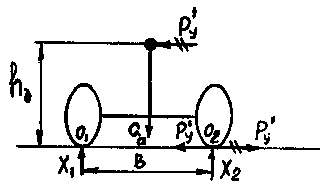
Рисунок 18 Простейшая схема определения заноса (опрокидывания) автомобиля
С увеличением скорости и уменьшением радиуса поворота центробежная сила резко возрастает.
Наиболее опасным с точки зрения поперечной устойчивости является криволинейное движение на поперечном уклоне, совершаемое в направлении к его верхней части. В этих условиях составляющая Р′у центробежной силы параллельна поверхности уклона, направлена вниз по уклону и суммируется с боковой составляющей веса G∙Sinβ. Итак, при движении автомобиля на повороте радиуса R возникает центробежная сила Ру, стремящаяся сдвинуть его от центра поворота. При этом может быть опрокидывание или занос. В точке О2 приложим противоположнонаправленные силы Р′у, получим момент Р′у∙hд опрокидывающий автомобиль вокруг точки О1, и силу Р′у сдвигающую колеса вбок. Что произойдет раньше? Для этого определим скорости для каждого случая - рисунок 18. Предельная скорость по опрокидыванию:
Мо=0 Р′у∙hд=Ga∙B/2 (116)
или (Ga∙ν2∙hд)/g∙R=Ga∙B/2
откуда
νопр=![]() B∙g∙R/(2∙hд)
B∙g∙R/(2∙hд)![]()
![]() (117)
(117)
Чем больше В, R, и меньше hд, тем выше допустимая скорость. Предельная скорость по началу заноса :
Р′у=∙Ga
или
(Ga∙ν2)/g∙R=∙Ga
νзан=![]() ∙g∙R
∙g∙R![]()
![]() (118)
(118)
Разделив равенство (117) на (118), получим:
νопр/νзан=![]() (B∙g∙R)/(2∙hд∙∙g∙R)
(B∙g∙R)/(2∙hд∙∙g∙R)![]()
![]() =
=![]() B/(2∙∙hд)
B/(2∙∙hд)![]()
![]() (119)
(119)
Т.к. B>hд и <1, то νопр>νзан и занос автомобиля наступит раньше.