

Основы общей динамики лесотранспортных машин.
Общий метод решения задачи
Как отмечалось выше, специальные лесотранспортные машины должны обладать высокой маневренностью, устойчивостью, преодолевать препятствия и др. Поэтому вопросы распределения нагрузок на колеса (опорные катки), расположения центра тяжести и в целом, вопросы общей динамики, приобретают исключительно важное значение при конструировании и расчете лесотранспортных машин. Выше, при изучении вопросов тяговой динамики, проходимости и устойчивости тракторов и автомобилей, они рассматривались как нечто целое, т.е. в уравнения равновесия машин вводились лишь внешние по отношению к машине в целом силы и моменты. Это позволяло решать задачи тяговой динамики, определять реакции грунта на колеса при двухопорной подвеске рамы машины, определять положение центра давления, границы устойчивости машины и т.д.
Однако, при создании машины для расчета отдельных узлов необходимо знать нагрузки на каждый каток, определить силы, действующие на раму, рессоры, балансиры и другие детали ходовой системы.
Эти задачи невозможно решать, рассматривая машину в целом, необходимо ее расчленять, исследуя силы взаимодействия между ними.
Т.к. в лесной промышленности применяют машины с разными ходовыми системами, то целесообразно иметь единую методику расчета, которая была бы пригодна для решения задач по общей динамике различных транспортных систем.
Эта методика заключается в следующем:
1. Корпус любой транспортной системы (машины) перемещается на катках (колесах), которые соединены с корпусом непосредственно (жестко или через рессоры) или через дополнительную рычажную систему (балансиры). Поэтому и гусеничная система может рассматриваться как колесная, перемещающаяся на катках. Перемещение обеспечивается ведущей звездочкой, которая сцепляется с дорогой при помощи гусеничной ленты.
2. На общей схеме машины, которая уже не рассматривается как единое целое, выделяются корпус и точки его соединения с элементами ходовой системы, к которой относятся:
а) для колесных машин – оси балансирных кареток, а при их отсутствии – оси колес;
б) для гусеничных машин – оси ведущих звездочек, оси кареток или балансиров, а при их отсутствии – оси катков.
3. На схему наносят силы и моменты, действующие на корпус машины.
4. Составляют уравнения статики для корпуса машины.
Уравнения моментов обычно составляют относительно одной из крайних точек соединения корпуса с ходовой системой.
Решая указанные уравнения, находят нормальные и касательные силы, действующие на корпус в точках его опоры на ходовую систему.
Эти силы численно равны нагрузкам на узлы ходовой системы.
Изложенный метод позволяет решать задачу в общем виде, т.е. вывести уравнения для определения давления на узлы ходовой системы любого типа лесотранспортных машин.
Определение нагрузок на элементы ходовых систем
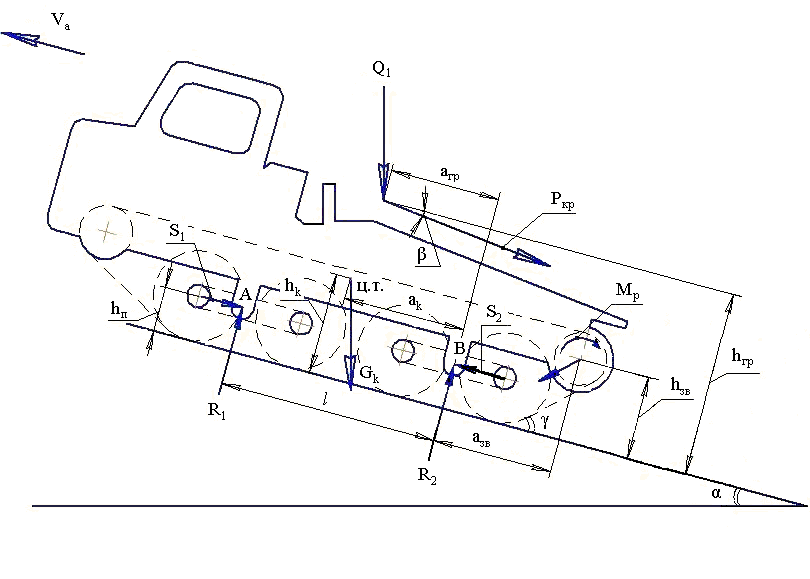
Рассмотрим гусеничный трелевочный трактор с балансирной 2-х опорной подвеской и применим положения общего метода определения нагрузок на детали ходовой системы. Нанесем силы и моменты, действующие на раму трактора при установившемся движении на подъем- исунок 22. На схеме показаны:
Мр – реактивный момент; Gк – вес рамы с агрегатами (вес подрессоренных масс); Рк – касательная сила тяги, приложенная к оси ведущего колеса, и направленная параллельно наклонной ветви гусеницы; zi и Si – нормальные и касательные реакции подвески на точки опоры рамы; γQ – вес полезного груза; Ркр– сила тяги на крюке.
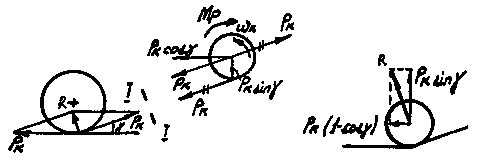
Рассечем гусеничную цепь, натянутую силой Рк – сечением I-I. К венцу ведущей звездочки будет приложена сила Рк, а к участку гусеницы под задним опорным катком такая же сила Рк, заменяющая отброшенную часть наклонного ведущего участка гусеницы и касательная реакция грунта, которую также можно считать равной Рк - рисунок 22 б.
Приложив к оси ведущего колеса две равные и противоположнонаправленные силы Рк получим Мр – реактивный момент, действующий на раму
Мр=Рк∙rзв=![]() -Мк
-Мк![]() (121)
(121)
и силы Рк∙Sinγ и Рк∙Сosγ, действующие на ось ведущего колеса (Рк∙Сosγ – толкающая сила).
Из схем “б” и “в” видно, что на ось заднего опорного катка действует сумма двух сил Рк, дающая в результате силу Рк∙Sinγ, направленную параллельно такой же силе, действующей на ось ведущего колеса, и силу Рк∙(1-Cosγ), толкающую вперед задний каток, который связан с рамой непосредственно или через балансир.
В результате на раму машин, имеющих аналогичную ходовую систему, передается толкающее усилие двумя путями: Рк∙Cos+Рк∙(1-Cos) = Рк (122)
Для определения реакций в точках опоры рамы (точки А и В), запишем 3 уравнения статики - Мв=0; Х=0; Z=0, - которых достаточно для определения трех неизвестных величин ZА, ZB, SB. Остальные силы и моменты известны или могут быть найдены дополнительными приемами.
SA=f∙(ZA+2∙qк∙Cos) + 2∙qк∙Sin , (123)
где qк – вес каретки подвески;
f – коэффициент сопротивления качению каретки по гусенице, который
можно приближенно считать равным коэффициенту сопротивления
качению гусеницы по грунту.
 а)
а)
б) в)
Рисунок 22 Схемы для определения нагрузок на опорные катки при двухопорной подвеске
Сила тяги на крюке находится рассмотрением сил, действующих на волочащуюся часть деревьев - рисунок 3.
Найдя значения ZА, ZB, SB можно перейти к рассмотрению равновесия балансира и найти силы, действующие на оси опорных катков.
Необходимо отметить, что нагрузки, передаваемые катками на грунт, равны нагрузкам на оси у всех катков (без учета веса траков, лежащих на грунте) кроме оси заднего катка.
Нагрузка на ось заднего катка больше нагрузки на грунт под ним на величину силы 1/2∙Рк∙Sinγ, которой задний каток подтягивается вверх.