

Одноступенчатые планетарные механизмы поворота (тт-4)
Рассмотрим устройство и принцип действия сдвоенного одноступенчатого пла нетарного механизма поворота (ПМП) на примере трактора ТТ-4 - рисунок 36.
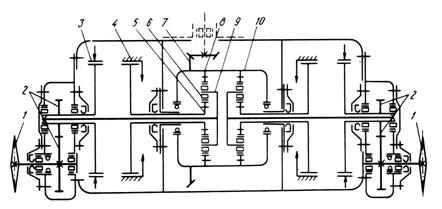
Коронная шестерня 8 находится в постоянном зацеплении с сателлитами 6, установленными на игольчатых подшипниках. Одновременно сателлиты находятся в постоянном зацеплении с солнечными шестернями 5, по наружным фланцам которых отцентрированы и закреплены тормозные барабаны 4. Водило 9 ПМП связаны с ведущими звездочками 1 гусениц.
ПМП работает следующим образом. При прямолинейном движении трактора тормоза 4 солнечных шестерен 5 затянуты, а остановочные 3 отпущены. В этом случае коронная шестерня 8 своим внутренним зубчатым венцом увлекает в направлении своего вращения сателлиты 6, которые обкатываясь вокруг заторможенных солнечных шестерен, вращают водила 9 и через торсионы, ведущие шестерни 2 конечных передач. На этом режиме ПМП работает как дополнительный понижающий редуктор.
|
|
|
Рисунок 36 Задний мост с ПМП: 1колесо ведущее; 2конечная передача;3тормоз водила; 4тормоз солнечной шестерни; 5солнечная шестерня; 6сателлит; 7ведомая шестерня главной передачи; 8коронная шестерня; 9водило;10–корпус ПМП |
При повороте трактора (влево) по дуге большого диаметра плавно растормаживают барабан 4–левый. Вращающиеся с коронной шестерней сателлиты начнут вращать и солнечную шестерню, вследствие чего скорость вращения их вокруг шестерни падает, водило и торсионы также замедляют скорость вращения, и трактор плавно поворачивает влево.
Для кругового поворота (разворота на месте) необходимо отпустить тормоз солнечной шестерни и затянуть тормоз водила 3.
При этом сателлиты больше не обкатывается вокруг солнечной шестерни, а только вращают ее. В зависимости от степени затяжки остановочного тормоза (водила) 3 трактор сделает крутой поворот или развернется «на месте».
Выше мы отмечали, что при прямолинейном движении ПМП работает как редуктор, т.е. создает некоторое передаточное число, которое определим с помощью равенства (132) - (na - nb∙(1+К) + nc∙К=0).
В соответствии с рисунком 36 последнее перепишем в виде:
n![]() +К∙n
+К∙n![]() -
(К+1)∙n
-
(К+1)∙n![]() =0
, (142)
=0
, (142)
где K=r![]() /r
/r![]() =Z
=Z![]() /Z
/Z![]()
При
затянутом тормозе 2, n![]() =0
и по соотношению (142) находим для ТТ-4 :
=0
и по соотношению (142) находим для ТТ-4 :
iпмп=n![]() /n
/n![]() = (К+1) / К , (143)
= (К+1) / К , (143)
где iпмп – передаточное отношение ПМП при полностью затянутом тормозе.
По аналогичной схеме выполнены механизмы поворота тракторов ТДТ-60/75, Т-140, у ТДТ-60/75 - К=2 и iпмп =3. У трелевочного трактора ТТ-4 ПМП выполнен с - i=1,41.
Силы и моменты, действующие на гусеничный трактор при повороте
Процесс поворота гусеничного трактора существенно отличается от процесса поворота колесного автомобиля.
Поворот гусеничной машины осуществляется изменением скоростей движения гусениц. При этом гусеницу, обладающую большей скоростью, называют забегающей, а гусеницу, обладающей меньшей скоростью и находящуюся ближе к центру поворота, отстающей.
-

Рисунок 37 Кинематика поворота гусеничной машины
Рассмотрим поворот гусеничной машины без прицепа. Центр тяжести машины описывает криволинейную траекторию. Одновременно машина вращается вокруг вертикальной оси, проходящей через ее центр тяжести. Такое движение машины осуществляется в результате изменения моментов на ведущих колесах и их частот при помощи механизмов поворота и двигателя.
Рассмотрим вначале наиболее простой случай поворота - равномерный поворот на горизонтальном участке с постоянной угловой скоростью и с постоянным радиусом (рисунок 37).
Очевидно, что ωт=νо/R , (144)
где νо – скорость точки 0т пересечения перпендикуляра, опущенного из центра поворота трактора 0 на его продольную ось симметрии;
R – радиус поворота.
Из схемы очевидно также: ν1=(R-B/2)∙ν0/R
ν2=(R+B/2)∙ν0/R, (145)
где ν1 и ν2 – скорость соответственно отстающей и забегающей гусениц;
В – расстояние между продольными осями гусениц, так называемая колея трактора.
При повороте трактора наряду с перекатыванием гусениц их опорные поверхности должны поворачиваться вокруг некоторых точек О1 и О2 называемых полюсами поворота гусениц.
Чтобы повернуть гусеницу на некоторый угол, необходимо сдвинуть относительно грунта ее опорную поверхность, преодолевая при этом силы трения между гусеницами и грунтом, срезая и сминая его, выворачивая шпорами и т. д.
Таким образом, при повороте гусеничной машины наряду с сопротивлением прямолинейному движению обязательно возникают дополнительные сопротивления вращательному движению. Эти сопротивления обычно очень велики, они приводят к перегрузке двигателя и снижению скорости движения трактора.
Поперечные реакции почвы, возникающие при вращении гусениц около полюсов, можно представить в виде суммы слагающих:
1. Поперечных составляющих сил трения, возникающих при скольжении опорной поверхности гусениц по почве.
2. Поперечных реакций почвы, вызываемых деформацией почвы под действием кромок гусениц.
3. Сил трения, возникающих при скольжении упорной поверхности зацепов в почве.
4. Сопротивления, возникающего вследствие бокового смещения точки приложения равнодействующей продольных реакций почвы на упорные поверхности зацепов;
5. Поперечных реакций почвы, вызываемых нагребанием почвы кромками гусениц.
В случае поворота трактора, движущегося без прицепа по горизонтали при равномерном давлении гусениц на почву и незначительных скоростях движения, полюсы вращения гусениц проходят через середины их опорных поверхностей.
Рассмотрим процесс поворота, приняв ряд допущений: движение происходит по горизонтальной площадке; нагрузка на опорные поверхности распределяются равномерно; скорости движения и ускорения малы, поэтому силами инерции можно пренебречь; ширина гусениц равна нулю.
В действительности процесс поворота значительно сложнее: ни одно из перечисленных условий не соблюдается, полюсы вращения гусениц не находятся на середине опорной поверхности, а смещаются под влиянием ряда факторов и т.д.
Однако рассмотрение упрощенной схемы сил и моментов, действующих на трактор дает возможность понять сложное явление поворота, выявить характер сил, действующих на машину, и наметить основные требования к ее механизму поворота. Рассмотрим процесс поворота одиночного трактора - рисунок 38. На схеме приведены :
Pf1 и Pf2 – силы сопротивления перекатыванию отстающей и забегающей гусеницы;
Рк1 и Рк2 – силы тяги на отстающей и забегающей гусеницах;
Мс – суммарный момент касательных сил трения и реакций грунта на опорной поверхности гусениц.
С учетом принятых допущений определим величину суммарного момента Мс сил сопротивления повороту обеих гусениц:
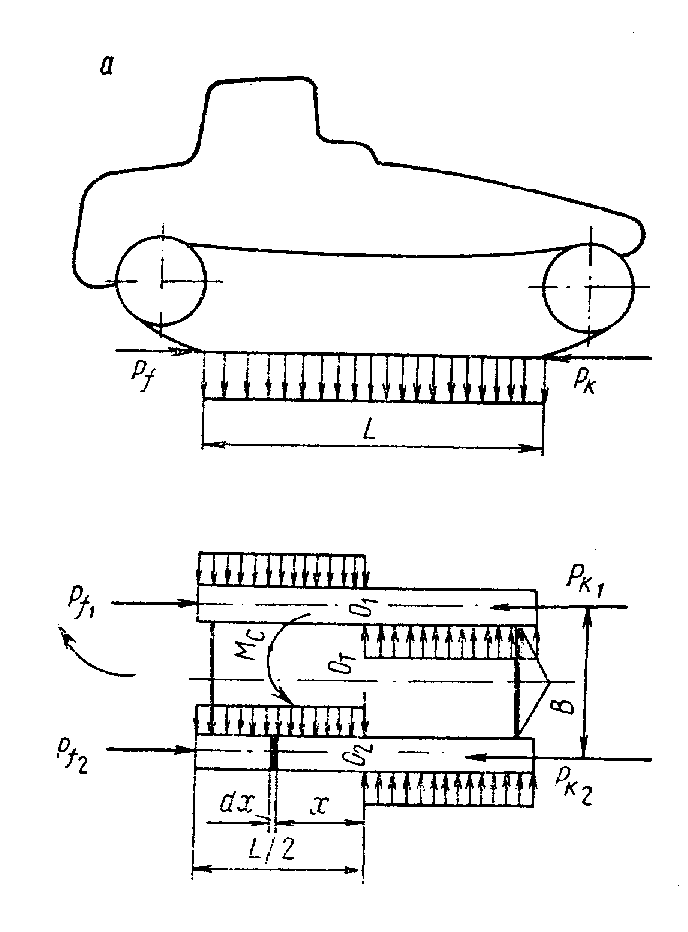
Рисунок 38 Схема поворота гусеничного трелевочного трактора без Ркр
L/2
Мс=4∙∫ μ∙(Gт/2∙L)∙xdx=μ∙Gт∙L/4 , (146)
0
где Gт – вес трактора, включая возможную нагрузку;
μ – коэффициент сопротивления повороту, учитывающий все указанные выше реакции почвы на погруженные в почву элементы гусениц, коэффициент μ принимается для данного радиуса поворота постоянным по всей длине опорных поверхностей гусениц;
L – длина опорных поверхностей гусениц;
X – расстояние элемента поверхности соприкосновения движителей с почвой от середины опорных поверхностей гусениц.
Величина коэффициента μ зависит от механических свойств грунта, конструкции гусеничных звеньев и их зацепов, глубины их погружения в почву и других параметров.
Для преодоления момента сопротивления повороту Мс к трактору необходимо приложить поворачивающий момент, который может быть создан силами тяги Рк1 и Рк2. Эти силы легко определяются из схемы на рисунке 38:
Σ Мо1=Рк2∙В-Рf2∙B-Mc=0
Мо1=Рк2∙В-Рf2∙B-Mc=0
ΣМо2=Рк1∙В-Рf1∙B+Mc=0 (147)
о ткуда
Рк2=Рf2+Mc/B
ткуда
Рк2=Рf2+Mc/B
Рк1=Рf1 - Mc/B (148)
Примем Pf1=Pf2=f∙Gт/2 и, c учетом равенства (148), запишем:
Pк2=f∙Gт/2+μ∙Gт∙L/(4∙В), (149)
Pк1=f∙Gт/2-μ∙Gт∙L/(4∙В), (150)
где f – коэффициент сопротивления перекатыванию гусениц, принимаемый нами одинаковым при повороте и прямолинейном движении.
Сложив почленно равенства (149) и (150) получим:
Pк2+Pк1=f∙G T (151)
Почленно вычитая эти равенства получим:
Pк2-Pк1=2∙μ∙Gт∙L / (4B) , (152)
а с учетом равенства (146) получим:
(Pк2-Pк1)∙B/2=Mс (153)
Величина (Pк2-Pк1) / (B/2) называется поворачивающим моментом Мпов.
Как следует из равенства (153), при установившемся повороте трактора повора чивающий момент Мпов должен быть равен моменту сопротивления повороту.
Из сказанного очевидно, что механизм поворота гусеничной машины должен подводить к забегающей и отстающей гусеницам силы тяги Pк2 и Pк1, отличные от сил тяги прямолинейного движения.
Анализируя равенство (152) замечаем, что на поворотливость трактора существенно влияет отношение L / B – чем оно больше, тем труднее поворачивать трактор. При очень больших значениях L / B может потребоваться такая большая сила тяги на забегающей гусенице, что силы сцепления ее с грунтом будет недостаточно. Гусеница начнет буксовать, а машина не будет поворачиваться. Предельное значение L / B по сцеплению с грунтом может быть найдено из следующего соотношения: Pк2 φ∙Gт/2 (154)
или (f∙Gт/2)+μ∙Gт∙L / (4B) (φ∙Gт/2)
откуда (L / B) 2∙(φ-f) / μ (155)
Т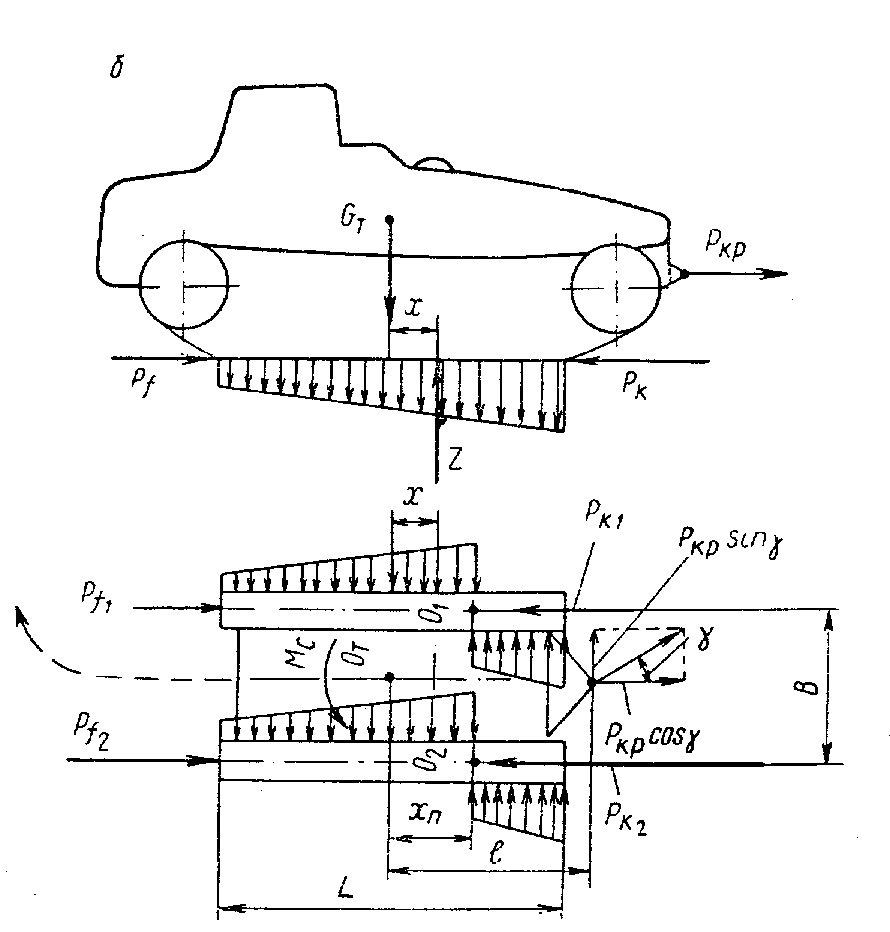 аким
образом, с очень большим отношением (L
/ B)
машины создавать нельзя.
аким
образом, с очень большим отношением (L
/ B)
машины создавать нельзя.
Рисунок 39 Схема поворота гусеничного трелевочного трактора с Ркр
Сила
тяги Pк2
всегда положительна – равенство (148), а
знак силы Pк![]() зависит
от соотношения величин входящих в
равенство (149). При очень больших значениях
μ
и L
/ B
сила тяги Pк1<0,
т.е. она должна быть направлена в сторону
обратную движению гусеницы.
зависит
от соотношения величин входящих в
равенство (149). При очень больших значениях
μ
и L
/ B
сила тяги Pк1<0,
т.е. она должна быть направлена в сторону
обратную движению гусеницы.
На величину момента Mc, а следовательно, и сил тяги Pк2 и Pк1 существенно влияет вид эпюры давления гусениц на грунт.
Силы, действующие на трактор перпендикулярно его продольной оси или продольные несимметрично приложенные силы, влияют на эпюру давлений, вызывают, кроме того появление дополнительного момента сопротивления повороту.
Рассмотрим поворот трактора с силой тяги на крюке - рисунок 39.
Под воздействием силы Pкр изменяется эпюра давления на грунт, а, следовательно, и эпюра сил сопротивления повороту.
И продольная и поперечная составляющие силы Pкр смещают полюса вращения О1 и О2. Они должны находится на линии, разделяющей эпюру сил сопротивления так, чтобы сумма всех поперечных
сил, включая силу Pкр∙Sinγ, была равна нулю.
Влияние изменения эпюры давления и смещения полюсов вращения на величину момента Mc учитывается поправочным коэффициентом К:
Mc=К∙μ∙Gт∙L / 4 (156)
Сила Pкр∙Sinγ создает дополнительный момент сопротивления:
Мдоп=Pкр∙Sinγ∙(lкр-xп) (157)
Результирующий момент сопротивления повороту будет:
Mрез=Мс+Мдоп=К∙μ∙Gт∙L / 4+Pкр∙Sinγ∙(lкр-xп) (158)
или в общем виде:
Мрез=λ∙μ∙Gт∙L/4 (159)
где λ –коэффициент, учитывающий влияние продольных и поперечных сил, дополнительных моментов, а также расположения центра тяжести машины.