

2.29. Общий случай движения твёрдого тела
Р
Рис. 2.59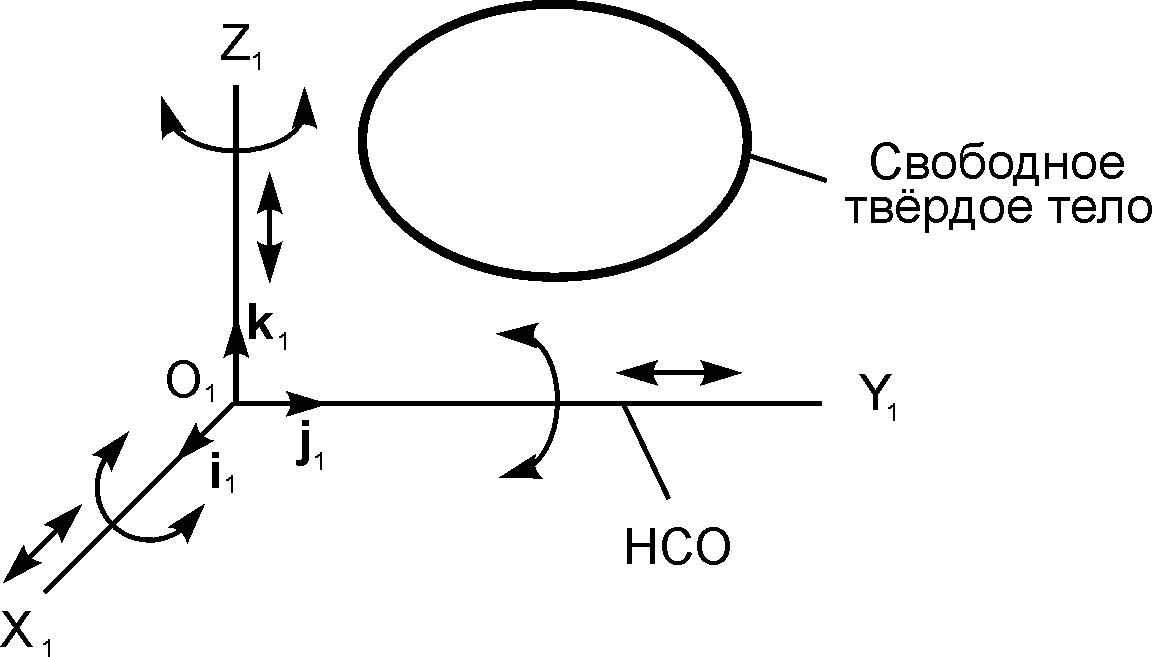
В общем случае движение свободного тела в пространстве можно рассматривать как сумму простейших движений (три поступательных движения, параллельные координатным осям, и три вращательных движения относительно этих осей), которые осуществляются одновременно и независимо друг от друга.
Таким образом, свободное тело в пространстве имеет шесть степеней свободы.
В
Рис. 2.60
Примем произвольную точку О за полюс и поместим в него начала двух подвижных систем отсчёта OXYZ, O2X2Y2Z2. При этом система отсчёта OXYZ неподвижно закреплена на теле, а система отсчёта O2X2Y2Z2 совершает поступательное движение таким образом, что её координатные оси параллельны координатным осям неподвижной системы отсчёта O1X1Y1Z1.
Плоскости OXY, O2X2Y2 подвижных систем отсчёта пересекаются по линии OL. Введением единичного вектора р эту линию преобразуют в ось узлов.
На рис. 2.60 показаны углы Ψ, φ, θ, величины которых зависят от времени. Эти углы называют эйлеровыми углами.
Таким образом, свободное движение тела определяется шестью уравнениями движения свободного твёрдого тела.
X1О = f1(t); Y1О = f2(t); Z1О = f3(t);
Ψ = f4(t); φ = f5(t); θ = f6(t),
где X1О, Y1О, Z1О – координаты полюса О в неподвижной системе отсчёта O1X1Y1Z1.
Первые три уравнения, определяющие поступательную часть движения тела, зависят от выбора полюса О, так как координаты различных точек тела различны.
Остальные три уравнения, определяющее сферическое движение тела вокруг полюса, от выбора полюса не зависят.
В
Рис. 2.61
Скорость VM любой точки М свободного тела равна геометрической сумме скорости VO полюса О и скорости VMO этой точки в её сферическом движении вокруг полюса.
VM = VO + VMO.
Скорость VMO определяют по формуле
VMO = Ω × rM,
где Ω – вектор мгновенной угловой скорости; rM – радиус-вектор, начало которого находится в полюсе, а конец в точке М.
Для студентов заочной и дистанционной форм обучения выполнение курсовых заданий на свободное движение тела не предусмотрено.
Вопросы и задания для самоконтроля
1. Сформулировать определение термина «сложное движение точки или тела».
2. Сформулировать определение термина «абсолютное движение точки».
3. Сформулировать определение термина «относительное движение точки».
4. Сформулировать определение термина «переносное движение точки».
5. Сформулировать определение термина «абсолютная траектория точки».
6. Сформулировать определение термина «относительная траектория точки».
7. Сформулировать определение термина «абсолютная скорость точки».
8. Сформулировать определение термина «относительная скорость точки».
9. Сформулировать определение термина «переносная скорость точки».
10. Сформулировать определение термина «абсолютное ускорение точки».
11. Сформулировать определение термина «относительное ускорение точки».
12. Сформулировать определение термина «переносное ускорение точки».
13. Сформулировать определение термина «кориолисово ускорение точки».