

Алгоритм решения задач статики
Выбирают систему отсчёта.
Выбирают тело, к которому приложена система уравновешивающихся сил.
Показывают все действующие на тело активные нагрузки.
Согласно аксиоме связей действие связей на тело заменяют соответствующими реакциями связей.
К полученной системе сил применяют уравнения равновесия, соответствующие этой системе сил.
Из уравнений равновесия определяют неизвестные величины.
1.8. Пример решения задачи на плоскую сходящуюся систему сил
Два стержня АС и ВС соединены шарнирно в узле С, к которому через блок D подвешен груз 1 весом 12 Н (рис. 1.33).
Определить реакции стержней АС, ВС, если угол = 60о.
Рис. 1.33
Решение. Решаем задачу по изложенному алгоритму.
Выбираем правую систему отсчёта OYZ.
Вырезаем узел С и рассмотрим его равновесие.Активных сил к узлу С не приложено. Следовательно, Σ FiE = 0.
От узла С отбрасываем невесомые стержни АС и ВС и показываем реакции RA и RB. Эти реакции направлены вдоль стержней. Условимся рассматривать их растянутыми. Отбрасываем нить и показываем на рисунке реакцию Т нити. Нить растянута. Модуль Т реакции Т равен весу G груза 1.
На узел С действует плоская система сходящихся реакций связей. Поскольку Σ FiE = 0, то геометрическое условие равновесия приобретает вид Σ RiE = RA + RB + T = 0. Аналитические условия равновесия выражаются двумя уравнениями:
Σ![]() = 0 =
– RA·sin()
+ RB·cos()
+ T = 0; (1)
= 0 =
– RA·sin()
+ RB·cos()
+ T = 0; (1)
Σ![]() = 0 = RA·cos()
+ RB·sin()
= 0. (2)
= 0 = RA·cos()
+ RB·sin()
= 0. (2)
Из уравнения (2) определим RA = – RB·
 =
– RB·tg().
При подстановке RA
в уравнение (1) имеем
=
– RB·tg().
При подстановке RA
в уравнение (1) имеем
RB·tg()·sin() + RB·cos() + T = 0.
Откуда
RB
= –
![]() =
=
=
–
![]() = – 6 Н.
= – 6 Н.
Так как RB 0, то стержень ВС сжат.
RA = – RB·tg() = – (– 6)·1,732 = 10, 392 Н.
Так как RA > 0, то стержень АС растянут.
Вопросы и задания для самоконтроля
Сформулировать определение термина «проекция силы на ось».
Записать формулы для определения проекций силы F на координатные оси декартовой системы отсчёта OXYZ.
Записать формулу для определения силы F через компоненты этой силы в декартовой системе отсчёта OXYZ.
Записать формулы для определения направляющих косинусов силы в декартовой системе отсчёта OXYZ.
Записать формулы для определения проекций равнодействующей системы сходящихся сил в декартовой системе отсчёта OXYZ.
Записать формулу, выражающую геометрическое условие равновесия сходящейся системы сил.
Записать уравнения равновесия для пространственной системы сходящихся сил в декартовой системе отсчёта OXYZ.
Записать уравнения равновесия для плоской системы сходящихся сил в декартовой системе отсчёта OXYZ.
1.9. Пара сил
Пару сил в механике рассматривают как одно из основных понятий, наряду с понятием силы.
Пара сил – система двух параллельных, противоположно направленных и равных по модулю сил, не лежащих на одной прямой.
Плоскость действия пары сил – плоскость, в которой находятся линии действия сил.
Плечо пары сил – кратчайшее расстояние (длина перпендикуляра) между линиями действия сил, составляющих пару сил.
На рис. 1.34 изображена пара сил, плоскость действия которой лежит в плоскости OXY системы отсчёта OXY.
Силы F1, F2 образуют пару сил. F1 = F2; F1 = – F2. Однако силы пары не уравновешиваются, так как они направлены не по одной прямой. Пара сил стремится произвести вращение тела, к которому она приложена. Действие пары сил на тело характеризуется её моментом.
Д
Рис. 1.34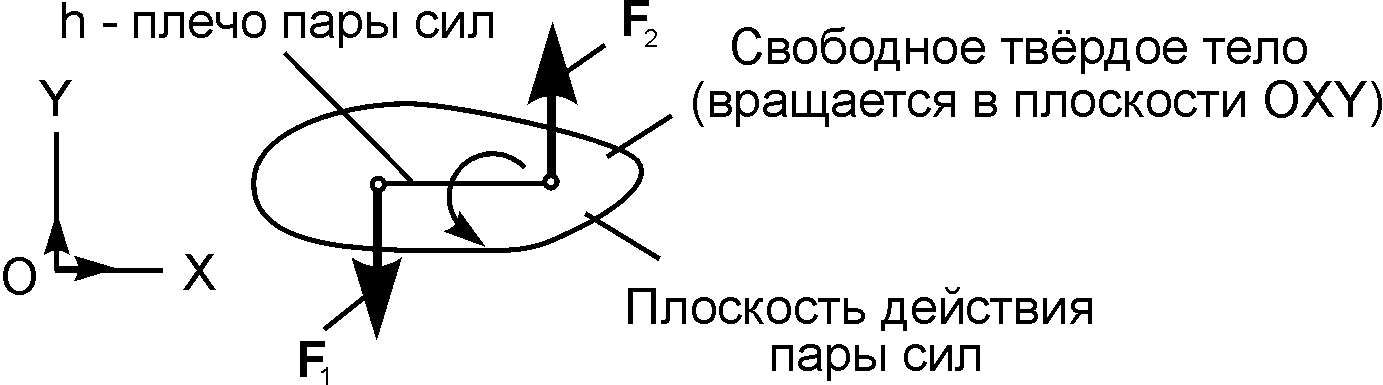
Алгебраический момент пары сил – величина, равная взятому с соответствующим знаком произведению модуля одной из сил на её плечо.
M = ± F1·h = ± F2·h.
Алгебраический момент пары сил считают положительным, если пара сил стремится повернуть тело против вращения часовой стрелки, и отрицательным, если в сторону вращения часовой стрелки. В системе СИ момент пары сил измеряется в Н·м.
Н
Рис. 1.35
Момент пары сил – векторная мера механического действия пары сил, равная моменту одной из сил пары относительно точки приложения другой силы.
Момент пары сил изображается вектором М. Вектор момента М пары сил (F1, F2) направлен перпендикулярно к плоскости действия пары сил в сторону, откуда видно пару сил, стремящуюся вращать плоскость её действия в сторону, противоположную вращению часовой стрелки. Согласно определению (см. рис. 1.35), M j, M i, M = F1h = F2·h. Таким образом, пара сил полностью характеризуется её моментом M.
Теорема. Пары сил, лежащие в одной плоскости, эквивалентны, если их алгебраические моменты численно равны и одинаковы по знаку.
Доказательство этой теоремы несложно и здесь оно не приводится.