

1.12. Вектор момента силы относительно точки
Момент силы F относительно точки О изображается вектором MО(F), приложенным в этой точке и направленным перпендикулярно к плоскости, содержащей силу и точку, в такую сторону, чтобы, смотря навстречу этому вектору, видеть силу F, стремящейся вращать эту плоскость в сторону, обратную вращению часовой стрелки (рис. 1.38).
М
Рис. 1.38
Если из точки О в точку А приложения силы F провести радиус-вектор r, то вектор момента силы относительно точки можно выразить следующим векторным произведением:
MО(F) = r F; MО(F) = rFsin(r, F) = rFsin() = Fh.
1.13. Алгебраический момент силы относительно точки
На рис. 1.39 изображены сила F и точки А и В, расположенные в плоскости OYZ.
П
Рис. 1.39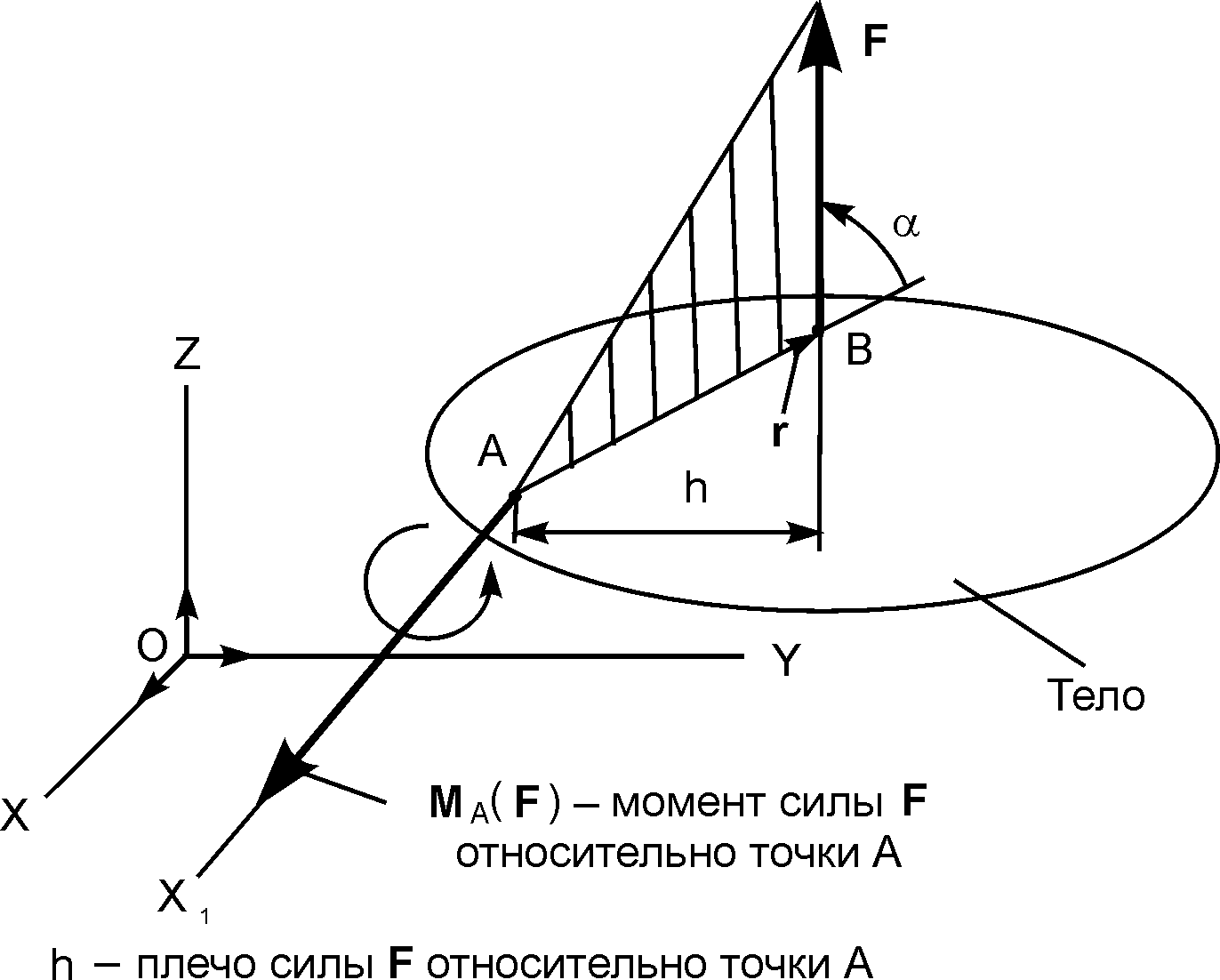
В случае, когда рассматривается плоская система сил, векторным выражением момента силы F относительно точки А (MA(F) = r F) пользоваться неудобно.
Вращательный эффект силы характеризуется алгебраическим моментом MA(F) силы F относительно точки А. MA(F) = ± Fh, где h – плечо силы F относительно точки А.
Плечо силы относительно точки – кратчайшее расстояние от точки до линии действия силы.
Если под действием силы F тело вращается против хода часовой стрелки, то MA(F) = Fh 0. Если под действием силы вращение тела происходит по ходу часовой стрелки, то момент этой силы относительно точки отрицателен (MA(F) = Fh < 0).
В общем случае справедлива формула
MA(F) = ± Fh.
На рис 1.40 изображены силы F, P, Q и точка А, расположенные в одной плоскости OXY.
А
Рис. 1.40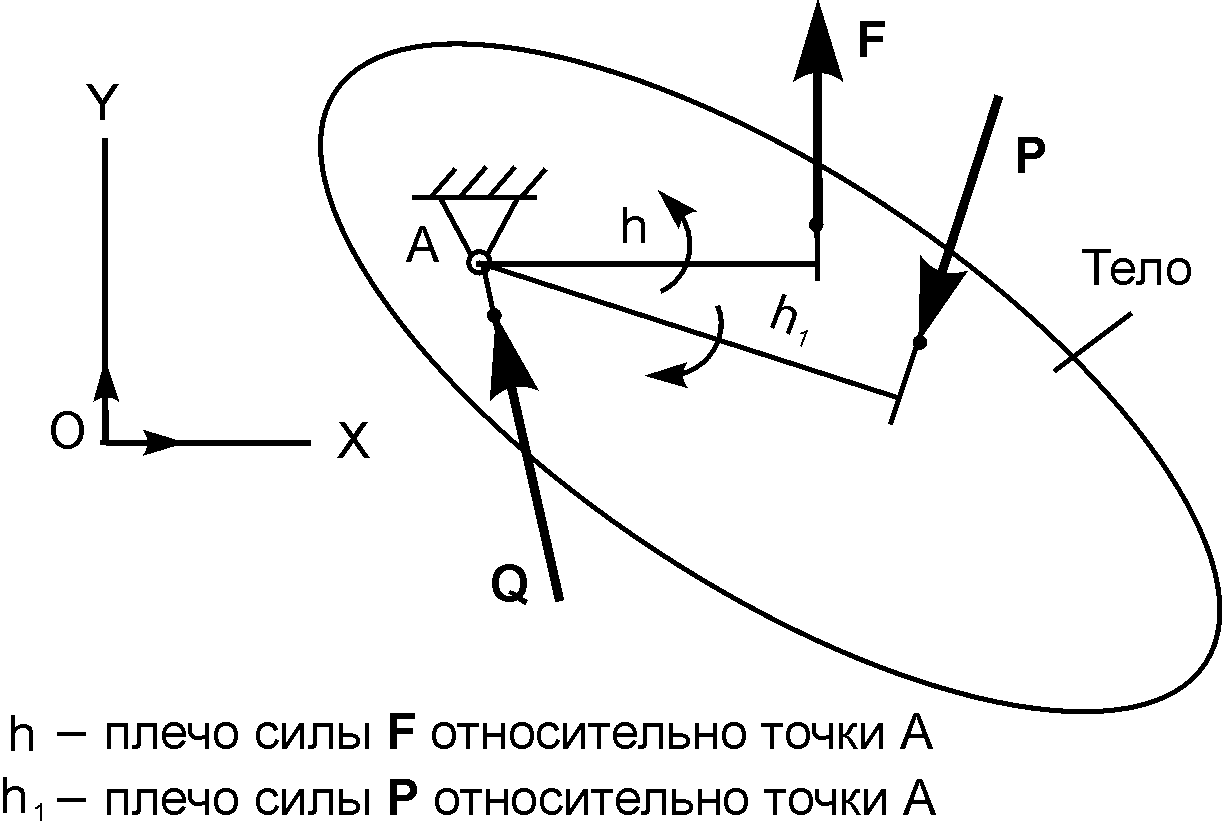
MA(F) = Fh 0;
MA(P) = – Рh1 0;
MA(Q) = Q·0 = 0.
Таким образом, алгебраическим моментом силы относительно точки называют взятое с соответствующим знаком произведение модуля силы на её плечо относительно точки.
Момент силы относительно точки не изменится, если силу переместить вдоль линии её действия.
Момент силы относительно точки равен нулю, если линия действия силы проходит через эту точку.
Вопросы и задания для самоконтроля
Сформулировать определение термина «пара сил».
2. Сформулировать определение термина «плоскость действия пары сил».
3. Сформулировать определение термина «плечо пары сил».
4. Сформулировать определение термина «алгебраический момент пары сил».
5. Сформулировать определение термина «момент пары сил».
6. Сформулировать теорему об эквивалентности пар сил, лежащих в одной плоскости.
7. Сформулировать первое следствие из теоремы об эквивалентности пар сил, лежащих в одной плоскости.
8. Сформулировать второе следствие из теоремы об эквивалентности пар сил, лежащих в одной плоскости.
9. Сформулировать теорему о равновесии пар сил, приложенных к телу.
10. Сформулировать определение термина «плечо силы относительно точки».
11. Записать формулу для определения алгебраического момента силы F относительно точки А.