2.26. Варианты курсового задания к 4 «Определение абсолютной скорости и абсолютного ускорения точки»
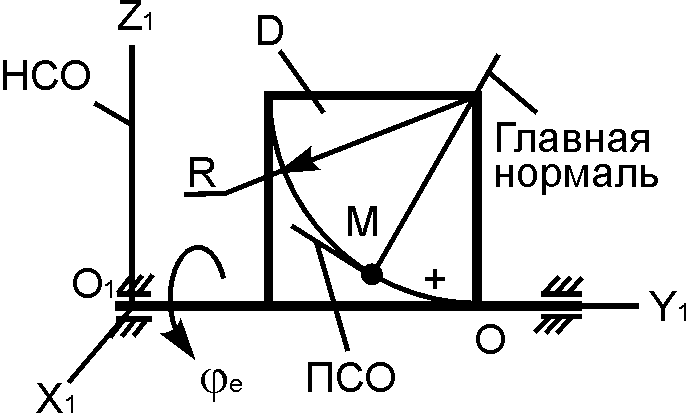
По заданным уравнениям относительного движения точки М и движения тела D определить для момента времени t1 абсолютные скорость и ускорение точки М. Схемы механизмов показаны на рисунках, а необходимые для расчёта данные приведены в табл. 2.4.
Определить кинематические характеристики точки М в момент времени t1 (OM(t1) – положение точки на траектории относительного движения; Ve(t1) – переносная скорость; Vr(t1) – относительная скорость; V(t1) – абсолютная скорость; ar(t1) – относительное ускорение; aе(t1) – переносное ускорение; aс(t1) – ускорение Кориолиса; a(t1) – абсолютное ускорение).
Для каждого варианта положение точки М на расчётной схеме соответствует положительному значению дуговой координаты ОМ = f(t).
Таблица 2.4
|
Номер варианта |
Расчётная схема механизма |
Исходные данные для расчёта |
|
1 |
2 |
3 |
|
1 |
|
ОМ = 18·sin(·t/4), см; φe = 2·t3 – t2, рад; b = 25 см; t1 = 2/3 c
|

Продолжение табл. 2.4
|
1 |
2 |
3 |
|
2 |
|
ОМ = 20·sin(·t), см; φe = 0,4·t2 + t, рад; R = 20 см; t1 = 5/3 c
|
|
3 |
|
ОМ = 6·t3, см; φe = 2·t + 0,5·t2, рад; b = 30 см; t1 = 2 c
|
|
4 |
|
ОМ = 10·sin(·t/6), см; φe = 0,6·t2, рад; α = 30o; t1 = 1 c
|



Продолжение табл. 2.4
|
1 |
2 |
3 |
|
5 |
|
ОМ = 40··сos(·t/6), см; φe = 3·t – 0,5·t3, рад; R = 30 см; t1 = 2 c
|
|
6 |
|
ОМ = 6·t2, см; φe = 2·t + 4·t2, рад; b = 30 см; t1 = 1 c
|
|
7 |
|
ОМ = 20··сos(2··t), см; φe = 0,5·t2, рад; b = 40 см; α = 60o; t1 = 3/8 c
|



Продолжение табл. 2.4
|
1 |
2 |
3 |
|
8 |
|
ОМ = 6·(t + 0,5·t2), см; φe = t3 – 5·t, рад; b = 40 см; α = 30o; t1 = 2 c
|
|
9 |
|
ОМ = 10·(1+sin(2··t)), см; φe = 4t + 1,6t2, рад; t1 = 1/8 c
|
|
10 |
|
ОМ = 20··сos(·t/4), см; φe = 1,2·t – t2, рад; R = 20 см; b = 20 см; t1 = 4/3 c
|
|
11 |
|
ОМ = 20·sin(·t/3), см; φe = 2·t2 – 0,5·t, рад; b = 25 см; t1 = 4 c
|




Продолжение табл. 2.4
|
1 |
2 |
3 |
|
12 |
|
ОМ = 15··t3/8, см; φe = 5·t – 4·t2, рад; R = 30 см; b = 30 см; t1 = 2 c
|
|
13 |
|
ОМ = 120··t2, см; φe = 8·t2 – 3·t, рад; R = 40 см; t1 = 1/3 c
|
|
14 |
|
ОМ =3+14·sin(·t), см; φe = 4·t – 2·t2, рад; α = 30o; t1 = 2/3 c
|



Продолжение табл. 2.4
|
1 |
2 |
3 |
|
15 |
|
ОМ = 5· φe = 0,2·t3 + t; рад; t1 = 2 c; b = 60 см; α = 45o
|
|
16 |
|
ОМ = 20·sin(·t), см; φe = t – 0,5·t2, рад; b = 20 см; t1 = 1/3 c
|
|
17 |
|
ОМ = 8·t3 + 2·t, см; φe = 0,5·t2, рад;
b = 4· t1 = 1 c
|
|
18 |
|
ОМ = 10t + t3, см; φe = 8t – t2, рад; α= 30o; t1 = 2 c
|




Продолжение табл. 2.4
|
1 |
2 |
3 |
|
19 |
|
ОМ = 6·t + 4·t3, см; φe = t + 3·t2, рад; R = 40 см; t1 = 2 c
|
|
20 |
|
ОМ = 30··cos(·t/8), см; φe = 6·t + t2, рад; R = 60 см; t1 = 2 c
|
|
21 |
|
ОМ = 25·(t + t2), см; φe = 2·t – 4·t2, рад; R = 25 см; t1 = 1/2 c
|
|
22 |
|
ОМ = 10··sin(·t/4), см; φe = 4·t – 0,2·t2, рад; R = 30 см; t1 = 2/3 c
|




Продолжение табл. 2.4
|
1 |
2 |
3 |
|
23 |
|
ОМ = 6··t2, см; φ = ·t3/6, рад; R = 18 см; OO1 =20 см; t1 = 1 c
|
|
24 |
|
ОМ = 75· (0,1·t2), см; φe = 2·t – 0,3·t2, рад; R = 30 см; t1 = 1 c
|
|
25 |
|
ОМ = 15·sin(·t/3), см; φe = 10·t – 0,1·t2, рад; t1 = 5 c
|
|
26 |
|
ОМ = 8·cos(·t/3), см; φe = 2··t2, рад; α = 45o; t1 = 3/2 c
|




Окончание табл. 2.4
|
1 |
2 |
3 |
|
27 |
|
ОМ = 6··t2, см; φ = ·t2/6, рад; R = 20 см; OO1 =20 см; t1 = 1 c
|
|
28 |
|
ОМ = 2,5··t2, см; φe = 2·t3 – 5·t, рад; R = 40 см; t1 = 2 c
|
|
29 |
|
ОМ = 6··t, см; φ = ·t/6, рад; R = 20 см; OO1 =20 см; t1 = 1 c
|
|
30 |
|
ОМ = 4··t2, см; Y1= t3 + 4·t; R = 48 см; t1 = 2 c
|