

2.5. Естественный способ задания движения точки
Е
Рис. 2.11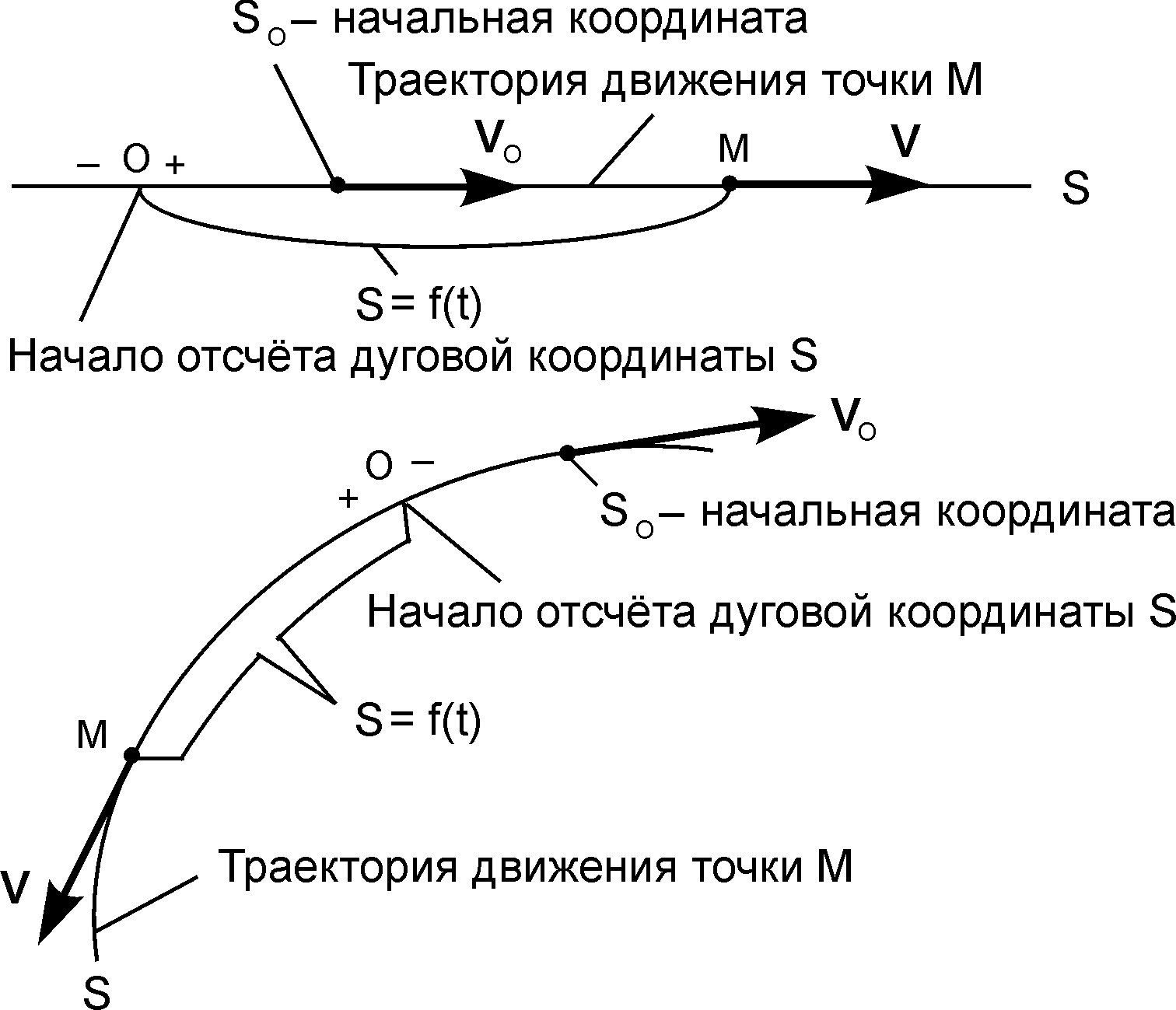
На известной траектории движения точки выбирается неподвижная точка О, которую называют началом отсчёта дуговой координаты. Положение движущейся точки М на траектории определяется дуговой координатой, т. е. расстоянием ОМ = S, отложенным по траектории от начала отсчета О.
Прямую линию на рис. 2.11 можно считать дугой окружности, радиус которой равен бесконечности.
Расстояния, отложенные в одну сторону от точки О, условно считают положительным, а в противоположную сторону – отрицательным, т. е. устанавливается направление отсчета дуговой координаты. При движении точки М расстояние S от этой точки до неподвижной точки О изменяется с течением времени, т. е. дуговая координата S является функцией времени.
S = f(t).
Эту зависимость называют уравнением движения точки в естественных координатах.
Если вид функции S = f(t) известен, то для каждого значения времени ti можно найти значение дуговой координаты Si, отложить соответствующее расстояние по траектории от начала отсчета О и указать, где находится движущаяся точка М в этот момент времени.
Таким образом, движение точки определено, если известны следующие элементы: вид траектории движения точки (прямая линия, окружность, эллипс и т. д.); начало отсчёта (точка О) дуговой координаты; положительное и отрицательное (+, –) направления отсчёта дуговой координаты; уравнение движения S = f(t).
Дуговую координату точки не следует смешивать с длиной пути, пройденного точкой за время t.
Пример. Пусть уравнение движения точки имеет вид S = 10·sin(·t) см. При начальном времени t0 = 0 начальная координата S0 = 0. При t1 = 0,5 c S(t1) = 10 см; при t2 = 1 c S(t2) = 0; при t3 = 1,5 c S(t3) = – 10 см; при t4 = 2 c S(t4) = 0.
Таким образом, за время t4 = 2 c точка М прошла путь, равный 40 см, а её дуговая координата S4 в этот момент времени равна нулю.
2.6. Естественные координатные оси
Точка перемещается в пространстве по заданному уравнению движения S = f(t) (рис. 2.12).
Проведём в точке М кривой АВ соприкасающуюся плоскость, нормальную плоскость, перпендикулярную соприкасающейся плоскости, и спрямляющую плоскость, перпендикулярную соприкасающейся и нормальной плоскостям. Пересечением трёх плоскостей образован естественный трёхгранник.
Линию пересечения соприкасающейся и нормальной плоскостей называют главной нормалью.
Линию пересечения спрямляющей и соприкасающейся плоскостей называют касательной.
Линию пересечения спрямляющей и нормальной плоскостей называют бинормалью.
Рис. 2.12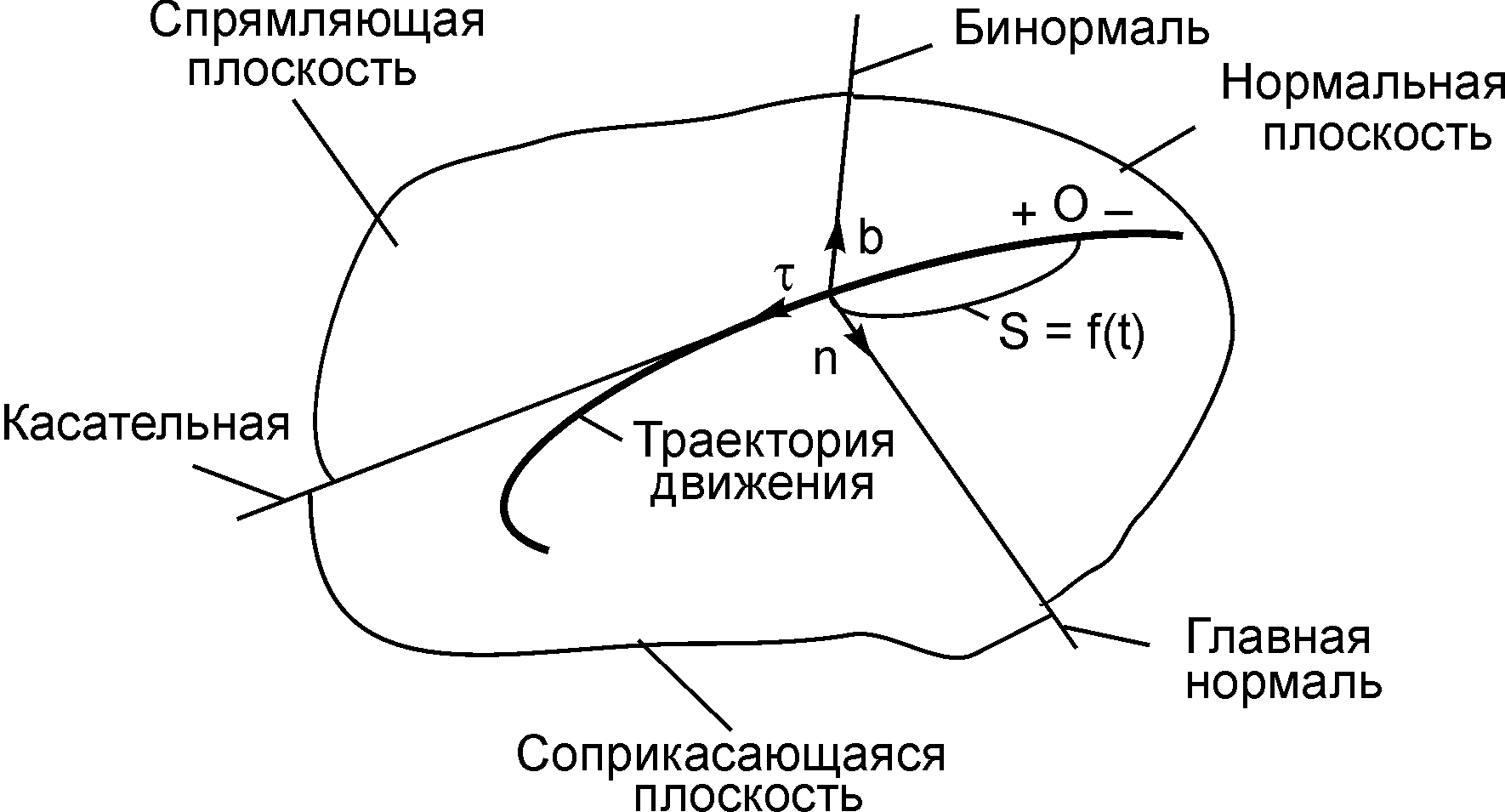
Естественными координатными осями называют три взаимно перпендикулярные оси: касательная (единичный вектор τ всегда направлен в сторону возрастания дуговой координаты S); главная нормаль (единичный вектор n направлен в сторону вогнутости траектории); бинормаль (единичный вектор b перпендикулярен векторам τ и n и направлен так же, как и вектор k по отношению к векторам i, j в правой декартовой системе отсчёта OXYZ) (рис. 2.13).
Рис. 2.13
Если в правой системе отсчёта OXYZ смотреть на единичные векторы I, j с положительного направления оси OZ (навстречу вектору k), то для совпадения направлений векторов i, j вектор i необходимо поворачивать против хода часовой стрелки. По такому же правилу ориентируются в пространстве векторы τ, n, b.
Начало естественных координатных осей всегда располагается в точке (см. рис. 2.12) и при движении по траектории перемещается вместе с ней. Естественные координатные оси, оставаясь взаимно перпендикулярными, изменяют своё направление в пространстве. Следовательно, естественные координатные оси образуют подвижную систему отсчёта (ПСО).
Р
Рис. 2.14
На рис. 2.14 орты τ и n расположены в соприкасающейся плоскости, а орт b не виден, так как он перпендикулярен ортам τ и n и плоскости рисунка.
Главная
нормаль всегда проходит через центр
кривизны траектории движения точки.
Здесь ρ – радиус кривизны траектории
движения. При движении точки по окружности
радиусом R
радиус кривизны траектории ρ = R.
При движении точки по прямой линии ρ =
![]() .
В остальных случаях при движении точки
по криволинейной траектории радиус её
кривизны является переменной величиной.
.
В остальных случаях при движении точки
по криволинейной траектории радиус её
кривизны является переменной величиной.