

Следствия из теоремы:
Пару сил, не изменяя её действия на тело, можно как угодно поворачивать и переносить в любое место плоскости её действия.
У пары сил можно изменять плечо и модуль силы, сохраняя при этом алгебраический момент пары и плоскость действия.
С
Рис. 1.36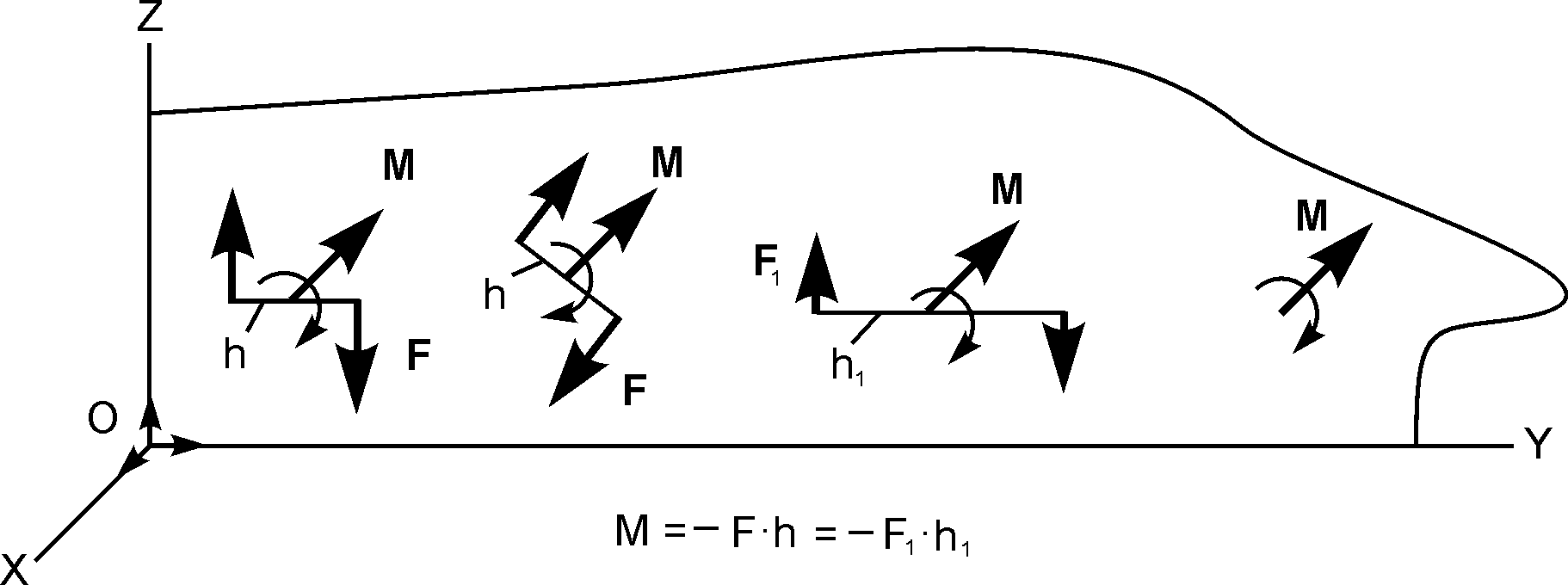
Теорема. Пары сил в пространстве эквивалентны, если их моменты геометрически равны.
Доказательство этой теоремы также достаточно просто и здесь не приведено.
Из теорем о парах сил следует вывод: не изменяя действия пары сил на тело, пару сил можно переносить в любую плоскость, параллельную плоскости её действия, а также изменять её силу и плечо, сохраняя неизменными модуль и направление её момента.
Таким образом, вектор момента пары сил можно переносить в любую точку, то есть момент пары сил является свободным вектором.
Вектор момента пары сил определяет три элемента: положение плоскости действия пары; направление вращения; числовое значение (модуль) момента.
Отметим аналогию: если точку приложения вектора силы можно помещать где угодно на линии действия этой силы (скользящий вектор), то векторный момент пары сил можно приложить в любой точке тела (свободный вектор).
1.10. Сложение пар сил
П
Рис. 1.37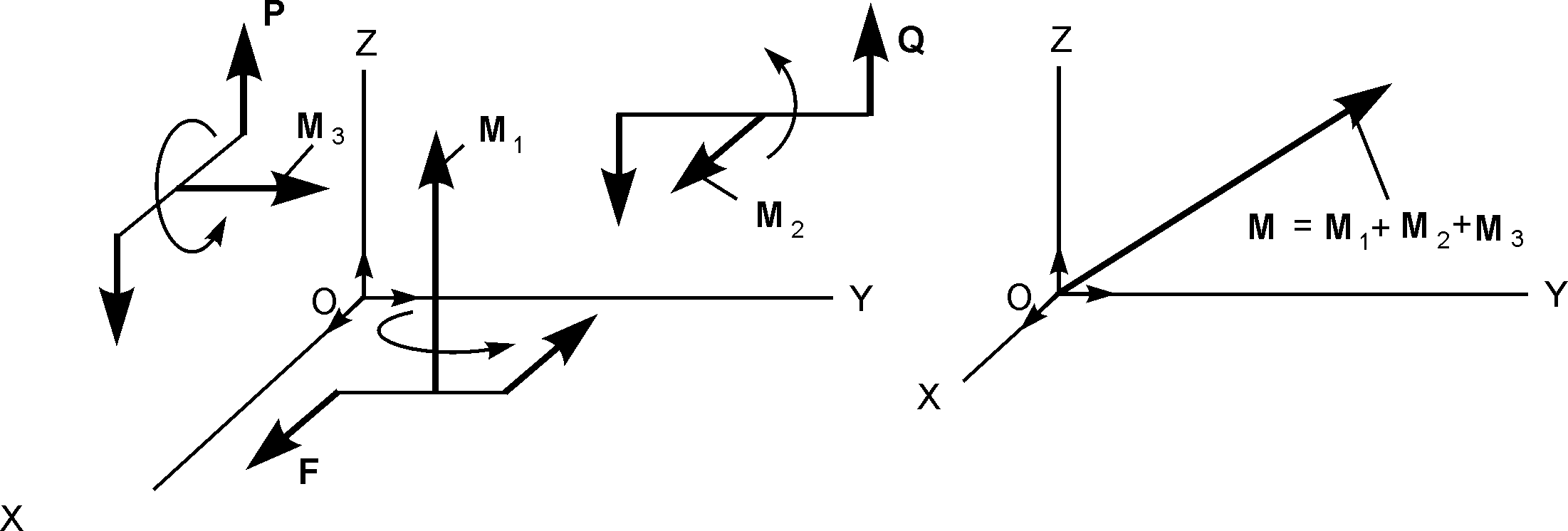
Векторные моменты этих пар сил обозначим М1, М2, М3. Так как эти векторы свободные, то переместив их в начало системы отсчёта OXYZ, получим систему векторов, приложенных в одной точке. Сложив графически эти векторы, получим один вектор М = М1 + М2 + М3.
Если таких векторов много, то в общем случае имеем M = Σ Mi (см. рис. 1.37).
Векторный момент пары сил, эквивалентный данной системе пар сил в пространстве, равен сумме векторных моментов заданных пар сил.
1.11. Условия равновесия пар сил
Теорема. Для равновесия пар сил, действующих на тело, необходимо и достаточно, чтобы величина векторного момента эквивалентной пары сил равнялась нулю или векторный многоугольник, построенный на векторных моментах заданных пар сил, был замкнут:
M = Σ Mi = 0.
В аналитической форме условия равновесия пар сил в пространстве выражаются системой уравнений:
MOX = Σ MiOХ = 0; MOY = Σ MiOY = 0; MOZ = Σ MiOZ = 0,
где MOX, MOY, MOZ – проекции векторного момента М эквивалентной пары сил на координатные оси OX, OY, OZ; Σ MiOХ; Σ MiOY; Σ MiOZ – суммы проекций векторных моментов Mi на координатные оси.
Теорема. Для равновесия пар сил, приложенных к телу, необходимо и достаточно, чтобы алгебраические суммы проекций векторных моментов пар сил на каждую координатную ось равнялись нулю.
В общем случае пару сил можно уравновесить только парой сил и нельзя уравновесить одной силой.