

Шарнирно-подвижная и неподвижная опоры
Н
Рис. 1.21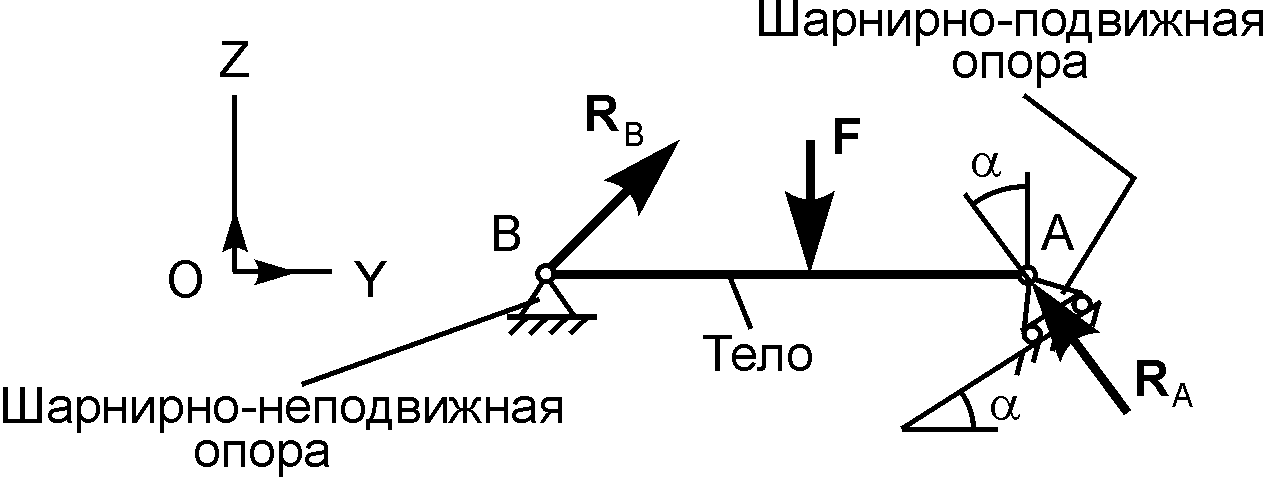
Реакция RA шарнирно-подвижной опоры направлена по нормали к опорной поверхности в сторону балки. Шарнирно-подвижная опора поставлена на катки, которые не препятствуют перемещению балки вдоль опорной поверхности. Если не учитывать трения катков, то линия действия реакции RA проходит через центр шарнира перпендикулярно опорной поверхности.
Шарнирно-неподвижная опора препятствует поступательным перемещениям балки вдоль координатных осей, но дает ей возможность поворачиваться относительно оси шарнира. Линия действия реакции RB шарнирно-неподвижной опоры проходит через центр шарнира, но модуль и направление реакции заранее неизвестны.
На рис. 1.22 изображена балка АВ. По аксиоме параллелограмма сил, которая допускает обратное толкование, реакцию RВ можно разложить на составляющие, параллельные координатным осям.
С
Рис. 1.22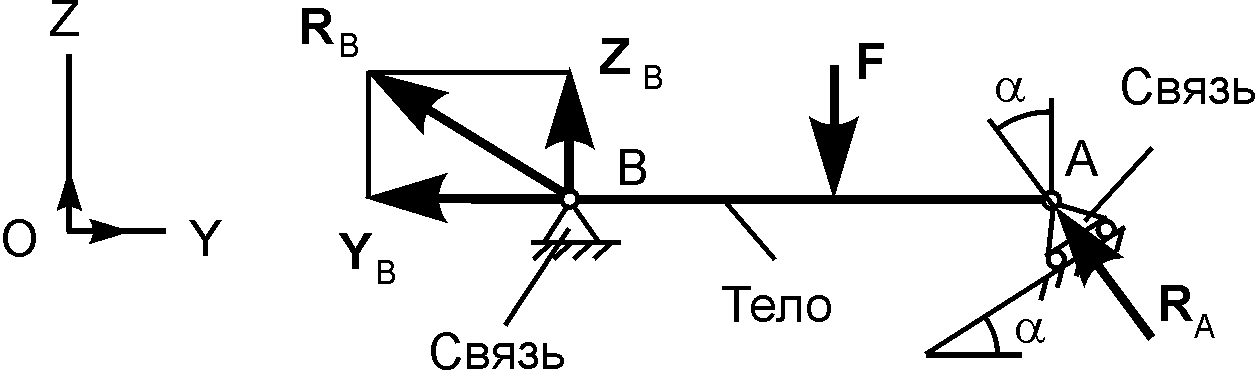
Более сложные виды связей и их реакции рассматриваются позднее, когда будут введены понятия пары сил и моментов сил относительно точки и оси.
Аксиома связей – всякое несвободное тело можно рассматривать как свободное, если отбросить связи и заменить их действие реакциями этих связей.
На рис. 1.23 изображена балка АВ, рассматриваемая как несвободная механическая система, на которую наложены внешние связи.
Шарнирно-неподвижная опора в точке В не позволяет балке перемещаться поступательно параллельно координатным осям и позволяет поворачиваться в плоскости рисунка. Исходя из этого, реакцию RВ раскладывают на её составляющие YВ, ZВ, параллельные координатным осям.
Шарнирно-подвижная опора в точке А не позволяет балке совершить перемещение на опорную поверхность, поэтому её реакция RА направлена по нормали.
Рис. 1.23
В
Рис. 1.24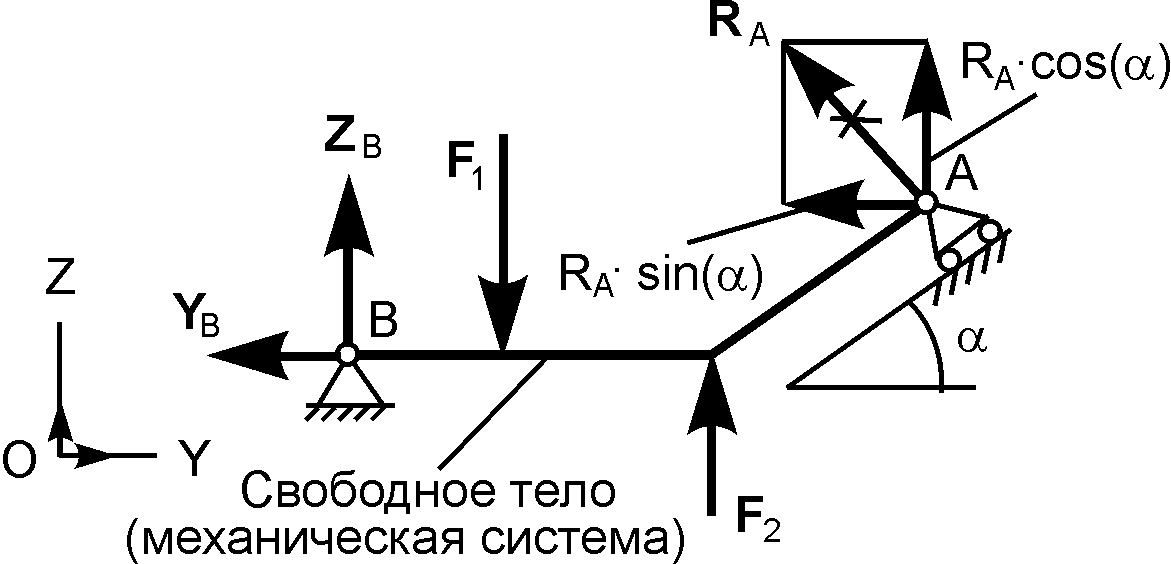
Балка АВ находится в равновесии под действием активных сил F1, F2 и реакций ZB, YB, RA внешних связей. Реакцию RA целесообразно разложить на составляющие силы по координатным осям.
Необходимо еще раз подчеркнуть, что разложение силы на составляющие силы производится только в точке приложения силы.
Вопросы и задания для самоконтроля
Сформулировать определение термина «несвободное тело».
Сформулировать определение термина «связи».
Сформулировать определение термина «реакции связей».
Сформулировать определение термина «гладкая связь».
Сформулировать определение термина «гибкая связь».
Сформулировать определение термина «невесомый стержень».
Сформулировать определение термина «свободное тело».
Сформулировать аксиому связей.