

|
|
VB D |
|
(db )µ |
с-1. |
|
|
ω = |
3 |
= |
3 |
V |
|
|
|
(DB3 )µl |
||||
|
3 |
lDB |
|
|
||
|
|
|
|
|||
|
|
3 |
|
|
|
отрезок (db3), изображающий |
Направление вращения получается, |
если |
|||||
|
, мысленно перенести в точку В3. |
|||||
вращательную скорость VB D |
||||||
3 |
|
|
|
|
|
|
Скорость точки Е кулисы, вращающейся вокруг оси шарнира D, перпендикулярна прямой DE и, следовательно, параллельна скорости точки В3; величины скоростей пропорциональны их расстояниям от оси вращения:
VED = lDE .
VB3D lDB3
Отсюда следует правило подобия |
|
(de) |
|
(DE) |
|
|
|
|
(de)µV |
= |
= |
. |
(3.4) |
||
|
(db3 )µV |
|
(db3 ) |
|
(DB3 ) |
|
|
Используя правило (3.4), найдем: точка е плана скоростей находится на прямой (db3) на расстоянии
(de)=(db3 )((DE)) мм DB3
от точки d.
Действительно, проводя через точку d прямую, параллельную скорости VED , убеждаемся, что она совпадает с прямой db3, остается найти отрезок (de).
3.3 Ошибки механизмов
Ошибка положения механизма – различие в положениях ведомых звеньев (например, кулис 3 на рисунке 3.6) действительного и соответствующего теоретического механизмов при одинаковых положениях ведущих звеньев (кривошипов 1). Ошибка перемещения – разность перемещений ведомых звеньев действительного и теоретического механизмов при одинаковых перемещениях их ведущих звеньев.
Положение кулисы 3 теоретического кулисного механизма (рис. 3.7) определяется углом α – функцией длин кривошипа и стойки:
α = f (l1, l0 ). |
(3.5) |
Пусть параметры l1 и l0 в действительном механизме отличаются от теоретических значений на малые величины l1 и l0. Ошибка п оложения определяется [2, с. 570] соответствующим приращением функции (3.5)
∆α = |
∂f |
∆l1 + |
∂f |
∆l0. |
(3.6) |
|
∂l |
∂l |
|||||
|
|
|
|
|||
|
1 |
|
0 |
|
|
Если для каких-либо двух положений кривошипа 1 найдены ошибки (3.6), ошибка перемещения ведомой кулисы 3 на перемещении кривошипа из одного положения в другое [2, с. 570]
(∆α)1−2 =(∆α)2 −(∆α)1 .
21

Найдем, например, ошибку (3.6), возникающую из-за ошибки в длине кривошипа l1: функция (3.5) имеет вид
|
|
|
α = arctg |
l1 |
, |
|
|
||||||
|
|
|
l |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
частная производная в ошибке (3.6) |
|
|
|
|
0 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||
∂f = |
|
|
|
1 |
|
|
1 |
= |
l0 |
, |
|||
|
|
|
|
|
2 |
|
l02 +l12 |
||||||
∂l1 |
|
|
|
|
|
l0 |
|
|
|||||
|
1 |
+ |
|
l1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
искомая ошибка |
|
|
|
l0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(∆α) |
|
= |
∂f |
∆l1 |
= |
|
l0 |
|
∆l1. |
(3.7) |
|
l1 |
∂l |
l2 |
+l2 |
||||||||
|
|
|
|
|
|
||||||
|
|
|
1 |
|
|
0 |
|
1 |
|
|
|
Используем для определения |
ошибки |
(3.7) план |
малых перемещений |
||||||||
(аналогичных скоростям) преобразованного механизма (рис. 3.7). При его построении останавливаем кривошип 1 в заданном положении и вводим [2, c. 571] дополнительный ползун 4, способный скользить вдоль кривошипа АВ. Сообщим ползуну 4 малое перемещение l1 и построим план малых перемещений, аналогичных скоростям (рис. 3.7): изобразив перемещение ∆B = ∆l1 отрезком (pb),
добавим к нему перемещение ∆B3B точки В3, направленное вдоль прямой ВD:
проведем из точки b прямую, параллельную линии ВD. С другой стороны, перемещение точки В3 в повороте кулисы 3 вокруг неподвижной оси шарнира D
(точка d совпадает на плане с его полюсом p), аналогичное вращательной
скорости VB3D , изображенной на рисунке 3.6 отрезком (db3), перпендикулярно
линии DB: проведем из точки d соответствующий перпендикуляр. Его пересечение с прямой, параллельной линии BD, дает точку b3, а отрезок (db3) – вращательное перемещение ∆B3D точки В3. Искомая ошибка
(∆α)l = |
|
∆B D |
|
= |
∆ |
B |
cosα |
, |
||||||||||
|
3 |
|
|
|
|
|
|
|
||||||||||
|
lDB |
|
l0 / cosα |
|||||||||||||||
|
1 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosα = |
|
AD |
= |
|
|
|
|
l0 |
|
|
; |
|
|
|||||
|
DB |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
l02 +l12 |
|
|
||||||||||||||
(∆α) |
= |
∆l cos2 α |
= |
|
|
|
l |
|
|
|
∆l |
|||||||
|
1 |
|
|
|
|
|
|
0 |
|
|
|
|||||||
|
|
|
|
|
|
2 |
|
2 |
|
|||||||||
|
l1 |
|
|
l0 |
|
|
|
|
|
|
|
|
|
1 |
||||
|
|
|
|
|
|
|
|
|
|
|
l0 |
+l1 |
|
|
||||
совпадает с результатом (3.7).
22
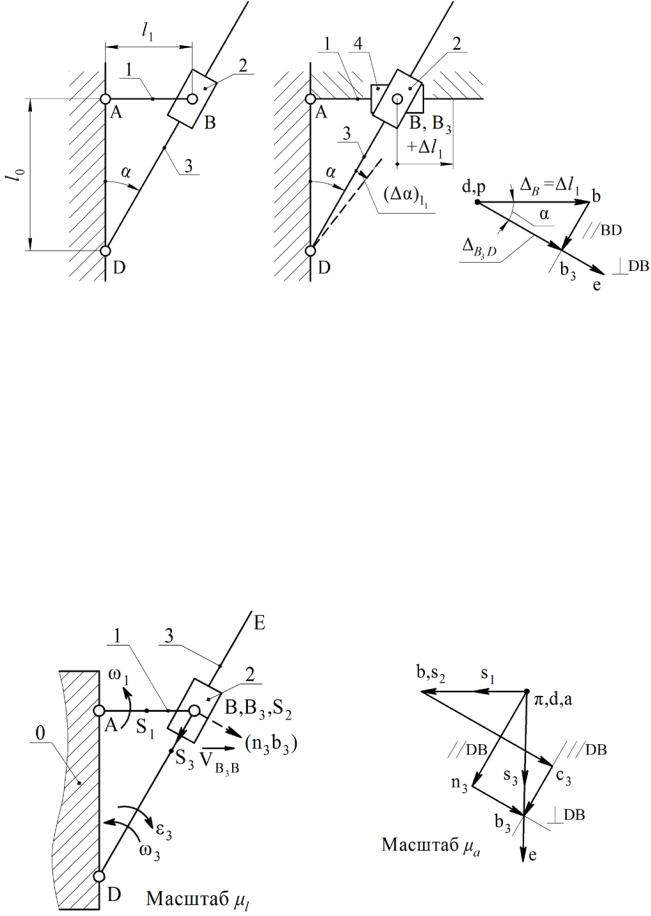
Рисунок 3.7 – Теоретический и преобразованный механизмы,
план малых перемещений
Лекция 4. План ускорений плоского механизма
4.1 План ускорений кулисного механизма
На рисунке 4.1 представлен план положений кулисного механизма с качающейся кулисой. Кривошип 1 равномерно вращается вокруг оси шарнира А, ускорение точки В – центростремительное (нормальное) – направлено вдоль линии ВА (из точки В в точку А). Его величина
aВ =ω12l1 м/с2.
Изобразим его (рис. 4.2) отрезком (πb) мм. Масштаб плана ускорений µa = aB / (πb) мс-2/мм.
Рисунок 4.1 – План положений |
Рисунок 4.2 – План ускорений |
кулисного механизма |
кулисного механизма |
|
23 |

Ускорение точки В3, принадлежащей кулисе 3 и совпадающей в данный момент времени с точкой В кулисного камня, находится по теореме о сложении ускорений [1, с. 50]:
aB |
= aB + aBc |
B + aBr |
B. |
(4.1) |
3 |
3 |
3 |
|
|
Кориолисово ускорение в геометрической сумме (4.1)
aBc3B = 2(ω2 ×VB3B ).
Его модуль aBc3B = 2ω2VB3B = 2ω3VB3B м/с2 (ибо переносная угловая скорость –
угловая скорость кулисного камня 2 равна угловой скорости кулисы 3), или (беря (рис. 3.6) отрезок (bb3), изображающий относительную скорость VB3B )
aBc3B = 2ω2 (bb3 )µV м/с2.
Его направление получается, как показано на рисунке 4.1, поворотом относительной скорости VB3B – отрезка (bb3) на рисунке 3.6 на 90° в сторону
переносного вращения с угловой скоростью ω2, равной угловой скорости ω3. Приложим к точке b плана ускорений отрезок
ac
(bc3 ) = µB3B мм.
a
Относительное ускорение aBr3B в сумме (4.1) направлено вдоль линии BD –
прямолинейной траектории движения точки В3 относительно точки В: проведем через точку С3 прямую, параллельную прямой ВD.
Кулиса 3 вращается вокруг неподвижной оси шарнира D. Вращение – частный случай плоскопараллельного движения. Его теория дает [1, c. 50] второе
векторное уравнение |
|
|
|
|
|
|
|
||||
|
n |
τ |
(4.2) |
||
|
aB |
= aD |
+ aB D |
+ aB D. |
|
3 |
|
3 |
3 |
|
|
|
|
|
|
|
|
Ускорение aD |
в геометрической |
сумме (4.2) равно |
нулю – точка d |
||
совпадает с полюсом π плана ускорений.
Центростремительное ускорение aBn3D точки В3 во вращении кулисы вокруг
оси шарнира D направлено вдоль линии B3D (из точки В3 в точку D), его величина
aBn3D =ω32 lDB3 =ω32 (DB3 )µl м/с2.
Величина отрезка (dn3), изображающего это ускорение,
an
(dn3 ) = µB3D мм.
a
Отложим отрезок (dn3) от точки d плана ускорений и проведем из точки n3
прямую, перпендикулярную линии DB3, – направление касательного ускорения
aτB3D в сумме (4.2). Пересечение прямых, проведенных из точек с3 и n3, дает точку
b3, а отрезок (πb3) мм – ускорение точки В3:
aB3 =(πb3 )µa м/с2.
24

Найдем ускорения центров масс S3 и S2 кулисы и кулисного камня, полагая, что центр масс кулисы находится в ее середине, центр масс кулисного камня совпадает с его точкой В. Ускорение центра масс кулисного камня
aS2 = aB. |
(4.3) |
Оно изображается (рис. 4.2) отрезком (πs2) мм, равным отрезку (π |
b) мм. Его |
величина |
|
aS2 =(πs2 )µa м/с2. |
(4.4) |
Ускорение центра масс кулисы aS3 найдем, предварительно выяснив
распределение ускорений во вращении стержня (в его плоскопараллельном движении). На рисунке 4.3 показано, как находится ускорение произвольной точки стержня в этом вращении:
aMA = aMAn + aτMA , aMAn =ω2 (AM )µl , aτMA =ε(AM )µl . |
(4.5) |
Нормальное и касательное ускорения точки М пропорциональны их расстоянию от полюса стержня А. Следовательно, ускорение aMA (4.5) по мере мысленного
перемещения вдоль стержня АВ растет по линейному закону (не изменяя направления!). На рисунке 4.3 показан план ускорений
aM = aA + aMA , aB = aA + aBA ,
изображенных отрезками (πm), (πb); (πa), (am), (ab), длины отрезков, изображающих ускорения во вращении вокруг полюса А,
(am) = |
aMA |
, |
(ab) = |
aBA |
. |
(4.6) |
|
||||||
|
|
|||||
|
µa |
|
µa |
|
||
Рисунок 4.3 – План положения стержня и план его ускорений
Из подобия треугольников АММ´ и АВВ´ на рисунке 4.3 следует правило подобия
[1, c. 47]:
25