

Лекция 2. Плоские механизмы с низшими парами V класса
Любой плоский механизм образуется, согласно Л.В. Ассуру, присоединением к стойке с ведущими звеньями (механизму I класса) кинематических цепей со степенью подвижности (1.2), равной нулю. Такие цепи с кинематическими парами V класса (вращательными и поступательными) называются [1, c. 19] структурными группами Ассура.
2.1 Структурные группы Ассура |
|
Степень подвижности группы Ассура (1.2) |
(2.1) |
W =3nг − 2 p5г = 0, |
где nг – число звеньев в группе, p5г – число кинематических пар V класса. При
этом следует различать кинематические пары, образованные звеньями, входящими в группу, – внутренние пары и внешние пары, образованные звеньями группы со звеньями, не входящими в группу. Число внутренних пар определяет в общем случае класс группы, число внешних пар – порядок группы.
Формула (2.1) дает число кинематических пар (внутренних и внешних) в группе:
p |
г |
= |
3nг |
. |
(2.2) |
|
|||||
5 |
2 |
|
|
||
|
|
|
|
||
Нетрудно видеть, что число звеньев в группе Ассура четное, а число кинематических пар (2.2) кратно трем. Подставляя в формулу (2.2) четные числа nr = 2,4,..., найдем:
p5г =3,6,...
2.2 Структурные группы второго класса
Совокупность групп второго класса (nг = 2, p5г =3) с одной внутренней и
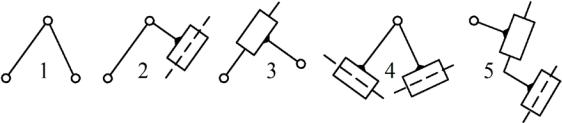
двумя внешними кинематическими парами включает в себя [1, c. 20] группы 5 видов (рис. 2.1).
Рисунок 2.1 – Группы Ассура второго класса
2.3 Примеры групп других классов
Рассматривая группы, состоящие из 4 звеньев и включающие в себя 6 кинематических пар, можно образовать три варианта [1, c. 21] кинематических
13
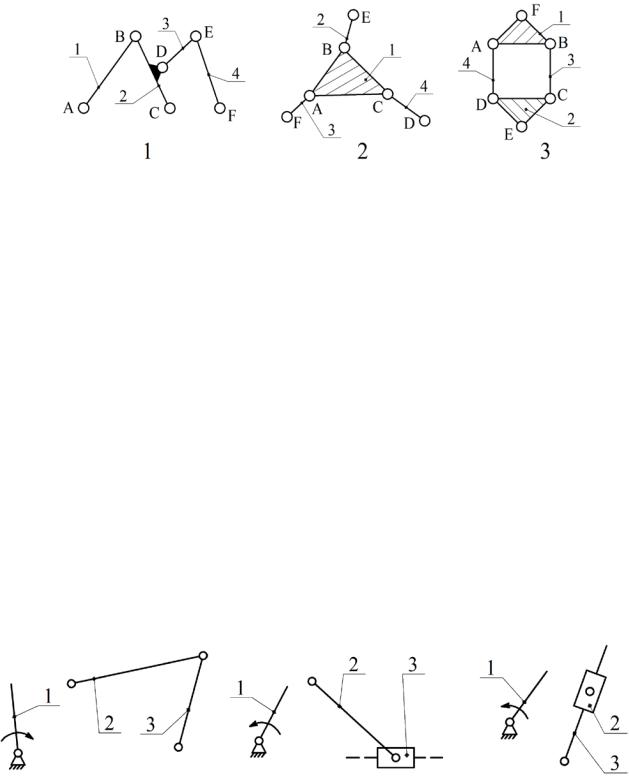
цепей с нулевой степенью подвижности – см. рисунок 2.2. Первый вариант не является группой – он распадается на две группы Ассура второго класса 1-го вида второго порядка (рис. 2.1), второй вариант – группа третьего класса (три внутренние пары A, B,C ) третьего порядка (три внешние пары E, F, D ), третий
вариант – группа четвертого класса (четыре внутренние пары A, B,C, D ) второго порядка (две внешние пары E, F ).
Рисунок 2.2 – Три варианта 4-звенных кинематических цепей с нулевой
степенью подвижности
2.4 Класс механизма
Выбрав ведущее звено (ведущие звенья), образующее со стойкой механизм I класса, отделим от заданного механизма группу Ассура, по возможности, наинизшего класса. Степень подвижности оставшегося механизма должна равняться степени подвижности исходного механизма. Если это условие не выполняется, отделяем группу высшего класса.
Результат разложения механизма на группы Ассура – ведущее звено со стойкой, то есть механизм I класса. Класс исходного механизма определяется наивысшим классом последовательно отделяемых групп Ассура.
2.5 Класс рычажного 4-звенного механизма (рис. 1.10)
На рисунке 2.3 показано разложение кривошипно-коромыслового (1), кривошпино-ползунного (2), кулисного (3) механизмов. От механизма 1 отделена группа второго класса 1-го вида (рис. 2.1), от механизма 2 – группа второго класса 2-го вида (рис. 2.1), от механизма 3 – группа второго класса 3-го вида (рис. 2.1). Формула строения каждого из них
I(1) → 2(2,3)
1 |
2 |
3 |
Рисунок 2.3 – Разложение рычажных 4-хзвенных механизмов
14
указывает, что к механизму I класса, образованному стойкой с ведущим звеном 1, присоединена группа Ассура второго класса, состоящая из звеньев 2 и 3. Групп других классов здесь нет – на рисунке 2.3 изображены механизмы второго класса.
2.6 Пример
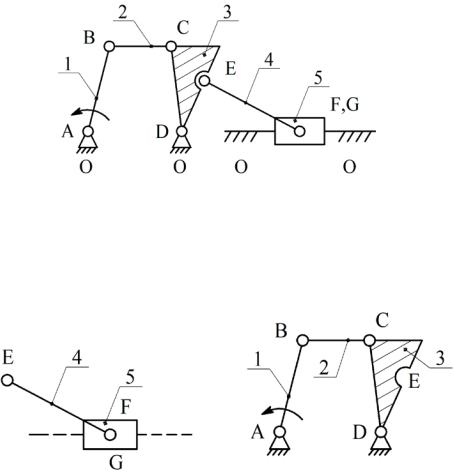
На рисунке 2.4 показана схема 6-звенного механизма, состоящего из кривошипа 1, шатуна 2, коромысла 3, шатуна 4, ползуна 5, входящих в 6 вращательных пар A, B,C, D, E, F и одну поступательную G (все они
принадлежат к V-му классу). Кинематическая цепь механизма сложная (звено 3 и стойка О входят в три кинематические пары C, D, E и A, D,G ), замкнутая (нет
звеньев, входящих в одну пару). Степень подвижности (1.2) |
|
W =3 5 − 2 7 =1. |
(2.3) |
Полагаем ведущим звеном кривошип 1. |
|
Рисунок 2.4 – 6-звенный механизм с низшими парами V-го класса
Отделим от механизма группу Ассура второго класса 2-го вида (рис. 2.1, 2.5). Степень подвижности оставшегося механизма (рис. 2.5)
W =3 3 − 2 4 =1
равна степени (2.3).
Рисунок 2.5 – Отделенная группа Ассура второго класса 2-го вида и
оставшийся 4-звенный механизм
Продолжим разложение механизма, отделяя вторую группу Ассура второго класса 1-го вида (рис. 2.1, 2.6). Остается механизм первого класса (рис. 2.6). Формула строения заданного (рис. 2.4) механизма
I(1) → 2(2,3) → 2(4,5)
относит механизм ко второму классу.
15
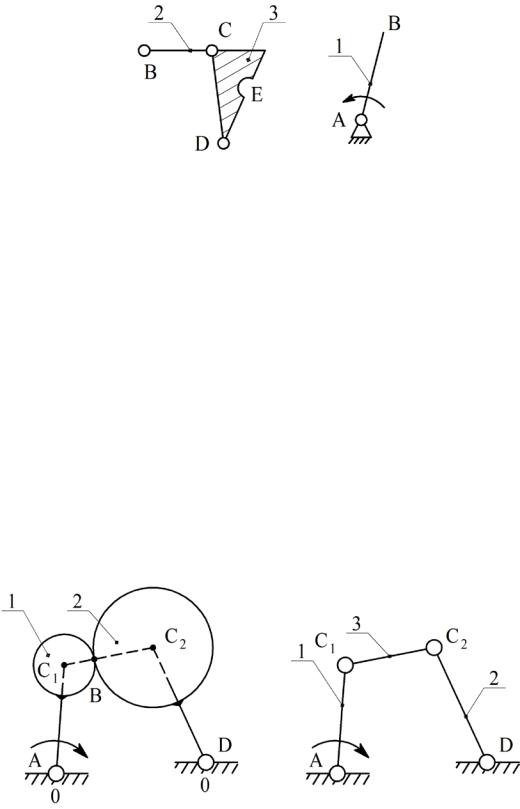
Рисунок 2.6 – Отделенная группа Ассура второго класса 1-го вида
иоставшийся механизм I класса
2.7Плоские механизмы с высшими парами IV класса
Пусть в плоском механизме имеются высшие пары IV класса (примеры таких механизмов показаны на рисунках 1.11, 2.7). Его класс может быть определен, если каждая из высших пар IV класса заменена одним звеном, входящим в две пары V класса, то есть в рассмотрении заменяющего механизма
(рис. 2.7).
Механизм на рисунке 2.7 состоит из трех звеньев 0, 1, 2, входящих в две низшие вращательные пары А, D V класса и высшую пару (контакт двух выпуклых кривых) IV класса. В условиях бесконечно малых перемещений звеньев 1 и 2 расстояние С 1С2 между центрами кривизны соприкасающихся кривых остается неизменным. Если поместить в центры С1 и С2 вращательные пары, в которые войдут звенья АС1, DC2 и твердое звено С1С2, получится рычажный заменяющий механизм (рис. 2.7). В момент, изображенный на рисунке, скорости и ускорения в пределах его звеньев 1 и 2 не отличаются от скоростей и ускорений заданного механизма.
Рисунок 2.7 – Плоский 3-звенный механизм с высшей парой В IV
класса и заменяющий мгновенный 4-звенный механизм с кинематическими парами (вращательными А, С1, С2, D) V класса
На рисунке 2.8 изображен кулачковый механизм с плоским коромыслом.
16