

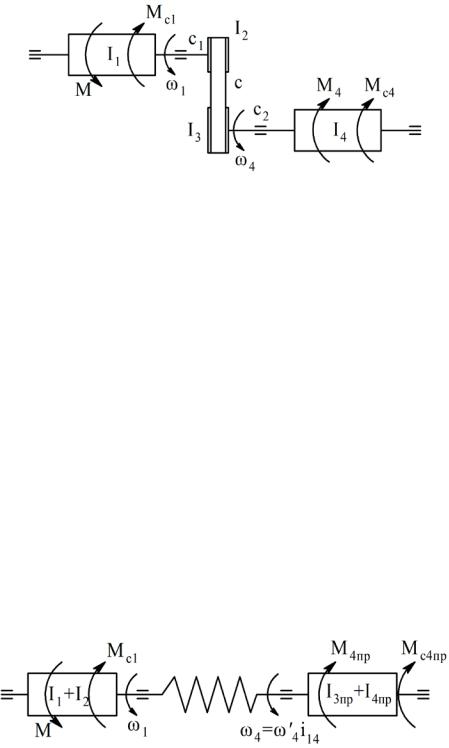
На рисунке 24.4 представлена кинематическая схема привода с массами, движущимися с различными скоростями.
Рисунок 24.4 – Кинематическая схема привода с ременной передачей:
I2 |
|
и I3 – моменты инерции шкивов, c – жесткость |
|||||||||||||||||||||||||
упругого податливого ремня |
|
||||||||||||||||||||||||||
Пользуясь приведенными моментами инерции (24.1) |
|||||||||||||||||||||||||||
|
I |
3пр |
= |
I3 |
, |
|
I |
4пр |
= |
I4 |
, |
i = |
ω1 |
, |
|
||||||||||||
|
|
|
|
i2 |
|
|
|
|
i2 |
|
|
14 |
|
ω |
4 |
|
|
||||||||||
|
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
|
|||
приведенными моментами полезного и вредного сопротивления (24.2) |
|||||||||||||||||||||||||||
|
|
M4пр = M4 , Mc4пр = Мс4 |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
i14 |
|
|
|
|
|
|
|
|
|
|
i14 |
|
|
|
|||
и эквивалентной податливостью |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
1 |
|
= |
|
1 |
+ |
1 |
+ |
1 |
|
, |
|
|
|
|||||||||
|
|
|
|
C |
|
|
|
|
С |
|
|
С |
|
|
|
|
|
||||||||||
|
|
|
|
экв |
|
С |
|
|
|
|
пр |
|
|
|
2пр |
|
|
|
|
||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
где приведенные жесткости (24.3, 24.4) |
|
|
|
|
|
|
|
|
Vp |
|
|||||||||||||||||
C |
2пр |
= |
С |
2 ; |
|
C |
пр |
= сρ |
2 |
, ρ |
= |
, |
|||||||||||||||
|
|
|
|
|
ω |
||||||||||||||||||||||
|
|
|
i2 |
|
|
|
|
|
1P |
|
|
1P |
|
|
|
||||||||||||
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
где Vp – скорость ремня, придем к рассмотрению двухмассовой упругой системы на рисунке 24.5.
Рисунок 24.5 – Двухмассовая упругая система – модель привода на рисунке 24.4
24.5 Пуск двигателя
Пренебрегая моментом потерь на трение Mc4 (рис. 24.5), рассмотрим двухмассовую упругую систему на рисунке 24.6 с несколько иными
165
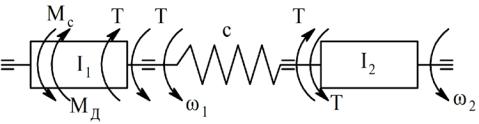
обозначениями. На нем Mд – постоянный момент двигателя, MC – постоянный момент потерь на трение, T – моменты «закручивающие» упругую связь.
|
Рисунок 24.6 – Пуск двигателя |
|
Уравнение движения ротора двигателя |
|
|
|
M −T = I1ω1 , M = Mд − Mc . |
(24.5) |
Закон Гука в приложении к упругой связи |
|
|
|
T = c(ϕ1 −ϕ2 ) , |
(24.6) |
где ϕ1 и ϕ2 – |
угловые перемещения ее концов; |
уравнение движения |
приведенного выходного звена |
|
|
|
T = I2ω2 |
(24.7) |
(точкой обозначено однократное дифференцирование по времени) .
Дважды дифференцируем соотношение (24.6) и выражая ускорения ω1 и ω2 из уравнений (24.5, 24,7), получим дифференциальное уравнение относительно крутящего момента T :
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
T = c(ω1 −ω2 ) = c M −T − |
, |
|
|||||||||||||||
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
I1 |
I2 |
|
||||
T + c |
I1 + I2 |
|
T = c |
|
I1 + I2 |
|
I1I2 |
|
M . |
(24.8) |
|||||||
|
|
|
|
||||||||||||||
|
|
|
|||||||||||||||
|
I1I2 |
|
|
|
|
|
|
I1I2 |
|
I1 + I2 I1 |
|
||||||
Вводя в уравнение (24.8) обозначения |
|
|
|
|
|
|
|
|
|
||||||||
|
Ω2 = c |
|
I1 + I2 |
, |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
I I |
2 |
|
|
|
|
|
|
||
|
|
|
|
|
M |
1 |
|
|
|
|
|
|
|
||||
|
ε = |
|
|
|
|
|
= const , |
|
|
|
|
||||||
|
|
|
I |
+ I |
2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
перепишем его: |
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
2 |
|
|
|
2 |
I ε . |
|
|
|
(24.9) |
|||
|
T + Ω T = Ω |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
Его общее решение слагается из общего решения однородного уравнения |
|||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
T + Ω T = 0 |
|
|
|
|
|
|
|||||||||
и какого-либо частного решения исходного неоднородного уравнения (24.9): |
|||||||||||||||||
T =C1 sin Ωt +C2 cosΩt + I2ε . |
(24.10) |
||||||||||||||||
Произвольные постоянные C1 и C2 |
|
|
в решении (24.10) находятся из начальных |
||||||||||||||
условий пуска – в момент t = 0 угловые скорости, |
угловое ускорение ротора, |
||||||||||||||||
производная крутящего момента
166

ω10 = 0, ω20 = 0, ω10 |
= |
M |
|
= c(ω10 +ω20 ) = 0 |
(24.11) |
I1 |
, T0 |
||||
(получаем из соотношения (24.6)), крутящий момент |
|
||||
|
T0 = 0 |
|
(24.12) |
||
(получается из уравнения (24.5)). Подставляя решение (24.10) и производную
T = Ω(C1 cosΩt −C2 sin Ωt)
в условия (24.11, 24.12), находим постоянные C1 и C2 :
C1 = 0 , C2 = −I2ε .
Решение, отвечающее начальным условиям (24.11), (24.12), |
|
T = I2ε(1−cosΩt). |
(24.13) |
Угловое ускорение ротора двигателя находится из уравнения (24.5):
ω |
= M −T |
= M − |
I2ε |
(1−cosΩt) . |
|
||||
1 |
I1 |
I1 I1 |
||
|
||||
Возвращаясь здесь к обозначениям в уравнении (24.8), получим ускорение ротора:
ω1 =ε +ε I2 cosΩt .
I1
Угловая скорость ротора
ω1 =εt + ε I2 sin Ωt+ D1. Ω I1
Начальное условие ω10 = 0 дает D1 = 0.
Угловое ускорение выходного звена находится из уравнения использованием решения (24.13):
(24.14)
(24.7) с
ω2 |
= |
T |
=ε(1−cosΩt), |
|
||||
|
|
|||||||
угловая скорость |
|
|
I2 |
|
|
|
|
|
|
|
|
|
ε |
|
|
|
|
ω |
|
=εt − |
sin Ωt + D . |
(24.15) |
||||
2 |
|
|||||||
|
|
|
|
Ω |
2 |
|
||
Начальное условие ω20 = 0 дает D2 = 0 . |
|
I1 и I2 |
||||||
Из решений (24.14), (24.15) |
видно, что угловые скорости масс |
|||||||
получаются наложением (рис. 24.7) гармонических колебаний с частотой Ω, происходящих в противофазе, на равноускоренное движение с угловым ускорением ε (которое получается, если пренебречь податливостью упругой связи, то есть из рассмотрения жесткого приведенного звена). При малом моменте инерции I2 угловая скорость
|
|
ω1 ≈εt |
изменяется во |
времени по линейному закону, тогда как угловая скорость ω2 |
|
колеблется по |
закону |
(24.15), так как амплитуда ее колебаний ε / Ω зависит |
только от ускорения ε |
и частоты Ω свободных колебаний системы. |
|
167
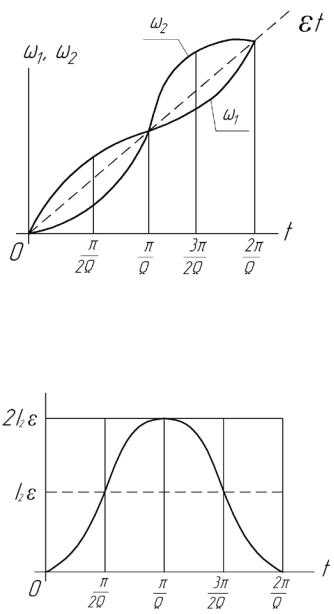
Рисунок 24.7 – Угловые скорости при пуске двигателя
Решение (24.13) представлено на рисунке 24.8. Как видим, возможна большая (двукратная) перегрузка упругой связи – по сравнению со средней нагрузкой I2ε .
Рисунок 24.8 – Крутящий момент в упругой связи
168