

2.4. Элементы кинематики материальной точки и тела, совершающих вращательное движение: угол поворота, угловые скорость и ускорение. Их связь с линейной скоростью и линейным ускорением
Рис.2.4

Основными кинематическими характеристиками вращательного движения являются: угол поворота, угловая скорость и угловое ускорение.
Угол поворота - угол между проведенными через ось вращения неподвижной полуплоскостью (плоскостью отсчета) и полуплоскостью, жестко связанной с телом и вращающейся вместе с ним. Угол поворота - псевдовектор - вектор, численно равный углу между двумя положениями радиуса R, направленный вдоль оси вращения и связанный с направлением вращения правилом векторного произведения (правилом правого винта).
С определенной степенью точности, под углом поворота можно подразумевать псевдовектор, численно равный углу, отсчитанному между двумя последовательными положениями радиус-вектора r, и связанный с направлением вращения правилом правого винта.
Угловая скорость - векторная физическая величина, показывающая, как изменяется угол поворота в единицу времени, численно равная первой производной от угла поворота по времени:
![]() .
(2.16)
.
(2.16)
Вектор угловой скорости направлен вдоль оси вращения в сторону, определяемую правилом правого винта (векторного умножения).
При равномерном вращении ω = const, ω = φ/t. Равномерное вращательное движение характеризуется периодом, частотой вращения и циклической или круговой частотой.
Период (T) - время, в течение которого тело сделает один полный оборот.
Частота (n) - число оборотов, совершаемых в единицу времени.
Круговая (циклическая) частота ω - число оборотов, совершаемых за время, равное 2π. Между периодом, частотой и круговой частотой имеется связь:
ω = 2πn = 2π/T; n = 1/T. (2.17)
Угловая скорость может изменяться как по величине, так и по направлению. Векторная физическая величина, характеризующая изменению угловой скорости в единицу времени, численно равная первой производной от угловой скорости по времени или второй производной от угла поворота по времени, называется угловым ускорением
![]() . (2.18)
. (2.18)
Направление вектора углового ускорения совпадает с направлением вектора угловой скорости в случае ускоренного вращения и противоположно - в случае замедленного.
Отдельные точки вращающегося тела имеют различные линейные скорости, которые непрерывно изменяют свое направление и зависят от угловой скорости и расстояния соответствующей точки до оси вращения r.
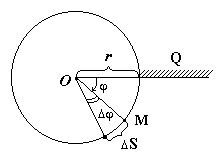
Точка, находящаяся на расстоянии r от оси вращения, двигаясь по траектории (окружности), проходит путь (рис.2.5):
Рис.2.5
Поделив обе части данного равенства на t; при t0 получим некоторые пределы от левой и правой частей:
![]() или
или
![]() .
(2.20)
.
(2.20)
Так как dS/dt = v, а dφ/dt = ω, то
v = rω. (2.21)
Полученная формула устанавливает связь между численными значениями линейной и угловой скорости, а также радиус-вектором r. Из нее видно, чем дальше отстоит точка от оси вращения, тем больше ее линейная скорость. Векторы v, ω и r перпендикулярны друг другу, следовательно, можно записать:
v = rω sinα или v = [ωr]. (2.22)
Известно, что a2 = at2 + an2, где at = dv/dt, an = v2/r. Следовательно, связь между полным линейным ускорением, тангенциальным и нормальным ускорениями имеет вид:
![]() (2.23)
(2.23)
Из написанных формул видно, что тангенциальное, нормальное и полное ускорения растут с увеличением расстояния от этих точек до оси вращения.
Можно показать, что любое сложное движение можно представить в виде поступательного и вращательного движений.
Надо отметить, что к вращательному движению применимы все формулы кинематики материальной точки, с заменой в них линейных величин соответствующими угловыми величинами. Например:
S = v0t + at2/2; φ = ω0t + εt2 /2. (2.24)
Уравнением вращательного движения в кинематике называют выражение, которое отображает функциональную зависимость угла поворота от времени:
= f(t).
В физике в качестве основной угловой меры принят радиан. Угол в радианах получается как отношение пройденного материальной точкой пути S к радиусу соответствующей окружности (см. рис.2.5):
![]() .
.