

4.2.2. Физический и математический маятники
Физический маятник - твердое тело, способное совершать гармоническое колебательное движение относительно оси, на которой оно подвешено. При этом ось не проходит через центр тяжести (рис.4.2).
В поле сил тяготения колебания физического маятника происходят под действие возвращающей силы, составляющей силы тяготения Fт = mg, которую можно разложить на две составляющие: по направлению прямой, перпендикулярной оси Fn, и по направлению, перпендикулярному данному – Fτ. Составляющая Fn не создают вращающего момента, так как она перпендикулярна оси вращения (колебания). Поэтому возвращающей силой, создающей вращающий момент в данном случае, является
Fτ = - mgsin, (4.11)
где - угол отклонения физического маятника от положения равновесия.
Рис.4.2
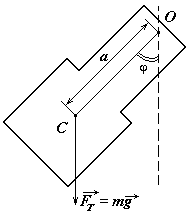
M = - mga, (4.12)
где a - расстояние от точки приложения силы до оси вращения.
Согласно основному уравнению динамики вращательного движения этот вращающий момент M численно равен Iε:
M = I∙ε. (4.13)
Таким образом, имеем
Iε
== - mga;
Iε
+= - mga
= 0;
![]() .
(4.14)
.
(4.14)
Полученное соотношение является уравнением движения физического маятника. С точки зрения математики, оно однородное, дифференциальное, второго порядка, решение которого имеет вид
= 0sin(ω0t + α), (4.15)
где α - начальная фаза колебаний.
Решая дифференциальное уравнение, можно определить круговую (циклическую) частоту и период колебаний физического маятника.
Так, подставив значение d2φ/dt2 = - ω02φ в уравнение движения, будем иметь
-Iω02φ + mgaφ = 0; -Iω02 + mga = 0. (4.16)
Откуда:
1) круговая или циклическая частота
![]() ;
;
![]() ; (4.17)
; (4.17)
2) период колебаний
![]() .
(4.18)
.
(4.18)
Из полученных результатов видно, что при малых углах отклонения от положения равновесия физический маятник совершает гармонические колебания с соответствующими циклической частотой и периодом.
Одной из характеристик физического маятника является так называемая приведенная длина Lпр = I/ma, с учетом которой для циклической частоты и периода колебаний физического маятника, соответственно, можно записать
![]() ;
;![]() .
(4.19)
.
(4.19)
Точка, расположенная на продолжении прямой, соединяющей ось подвеса с центром масс, находящаяся на расстоянии, равном приведенной длине Lпр, называется центом качаний физического маятника.
Используя теорему Штейнера, можно показать, что расстояние между осью подвеса и центром масс всегда меньше приведенной длины физического маятника:
![]() l.
(4.20)
l.
(4.20)
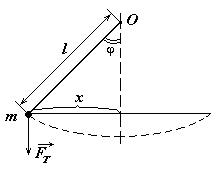 Рис.4.3
Рис.4.3
Математический маятник - тело массой m, подвешенное на невесомой, нерастяжимой нити, размерами которого можно пренебречь (рис.4.3).
Математический маятник совершает гармонические колебания под действием силы тяжести, подобно физическому маятнику.
В этом случае математический маятник можно рассматривать как материальную точку, для которой момент инерции
I = m∙l2, (4.21)
где l - длина математического маятника.
Так как математический маятник - частный случай физического маятника, вся масса которого сосредоточена в одной точке - центре масс, то, подставив в (4.19) значение (4.21) для циклической частоты и периода колебаний математического маятника, получим
![]() ;
;![]() .
(4.22)
.
(4.22)
Из (4.22) видно, что циклическая частота и период колебаний математического маятника зависит от его длины и ускорения свободного падения в данном месте пространства.
Сравнив формулы для определения циклических частот и периодов колебаний физического и математического маятников, можно установить физический смысл приведенной длины физического маятника: приведенная длина физического маятника - это физическая величина, численно равная длине такого математического маятника, период колебаний которого равен периоду колебаний физического маятника.
Надо отметить, что все рассмотренное справедливо для малых углов отклонения соответствующей системы от положения равновесия. Если данное условие не выполняется, то определение циклических частот и периодов колебаний представляется довольно трудной задачей, так как в этом случае они функционально оказываются зависимыми от угла отклонения:
![]() ;
;![]() ;
(4.23)
;
(4.23)
![]() ;
;![]() .
(4.24)
.
(4.24)