

8.4.1. Абсолютно неупругий удар шаров
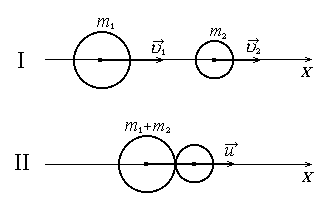
Абсолютно неупругий удар шаров (тел) характеризуется тем, что кинетическая энергия системы (шаров) полностью или частично превращается во внутреннюю энергию. Это означает, что для замкнутой системы не выполняется закон сохранения механической энергии, а выполняется только закон сохранения импульса. Шары (тела) после такого взаимодействия либо движутся с одинаковой скоростью, либо покоятся.
Рис.8.2
![]() . (8.41)
. (8.41)
Откуда
![]() .
(8.42)
.
(8.42)
Подсчитаем потерю системой кинетической энергии:
 =
=
![]() .
(8.43)
.
(8.43)
Интересен
случай, когда
![]() ,
,![]() .
Формула (8.43) в таком случае преобразуется
к виду
.
Формула (8.43) в таком случае преобразуется
к виду
![]() .
(8.44)
.
(8.44)
Таким
образом, потери кинетической энергии
составляют
![]() .
.
Если
же
![]() ,
то потери энергии
,
то потери энергии
![]() . (8.45)
. (8.45)
Рис.8.3

Рассмотрим
абсолютно упругий удар шаров, при
котором происходит упругая деформация
шаров, не возникает тепла и пластической
деформации (рис.8.3). Даны массы шаров и
их скорости до удара
![]() ,
,
![]() .
В результате такого взаимодействия
вся кинетическая энергия до удара
превращается в кинетическую энергию
системы (шаров) после удара. В результате
после удара шары будут двигаться с
некоторыми скоростями u1
и u2.
.
В результате такого взаимодействия
вся кинетическая энергия до удара
превращается в кинетическую энергию
системы (шаров) после удара. В результате
после удара шары будут двигаться с
некоторыми скоростями u1
и u2.
Пусть
![]() .
Шары взаимодействуют только между
собой, т.е. система замкнута, между
телами действуют только консервативные
силы.
.
Шары взаимодействуют только между
собой, т.е. система замкнута, между
телами действуют только консервативные
силы.
В такой ситуации должны выполняться законы сохранения импульса и механической энергии. Запишем эти законы применительно к данному случаю, причем закон сохранения импульса представим в алгебраической форме:
 .
(8.46)
.
(8.46)
Перепишем эти формулы следующим образом:
![]() ;
(8.47)
;
(8.47)
![]() .
(8.48)
.
(8.48)
Разделим (8.48) на (8.47) почленно:
![]() . (8.49)
. (8.49)
Теперь
имеем систему линейных уравнений (8.47)
и (8.49). Для нахождения скоростей шаров
после взаимодействия
![]() ,
,![]() выразим из (8.49)
выразим из (8.49)![]() и подставим в (8.47):
и подставим в (8.47):
![]() ,
,
![]()
![]() .
.
Откуда
![]() .
(8.50)
.
(8.50)
В
системе уравнений (8.46) ничего не
изменится, если заменить индекс 1 на
индекс 2, поэтому для получения формулы,
выражающей
![]() ,
достаточно в формуле (8.50) заменить
индекс 1 на индекс 2:
,
достаточно в формуле (8.50) заменить
индекс 1 на индекс 2:
![]() .
(8.51)
.
(8.51)
В общем случае
![]() ;
(8.52)
;
(8.52)
![]() .
(8.53)
.
(8.53)
Знак (+) соответствует случаю, когда первый шар нагоняет второй, а знак (-) - когда шары движутся навстречу друг другу.
Из уравнения (8.53) видно, что:
1) если m1 = m2 = m, то u1 = v2, а u2 = v1, т.е. в этом случае шары обмениваются скоростями;
2) при ударе шара о стенку (m2>>m1):
а) u2 = v2 - скорость стенки остается неизменной;
б) u1 = 2v2 – v1 - при этом, если стенка неподвижна (v2 = 0), скорость шара после удара, оставаясь неизменной по величине, изменяет свое направление на противоположное. При v2 = 0 u1 возрастает до 2v2 при движении стенки навстречу шару и убывает до 2v2, если стенка удаляется от него.