

2.2. Кинематика твердого тела
Различают несколько видов механического движения твердого тела: поступательное, вращательное вокруг неподвижной оси, вращательное вокруг неподвижной точки и другие. Первые два движения (поступательное и вращательное вокруг неподвижной оси) являются основными движениями твердого тела. Все остальные виды движения, оказывается, можно свести к одному из основных (простейших) движений или к их совокупности. Поэтому рассмотрим именно эти виды движений.
2.2.1. Поступательное движение твердого тела и его кинематические характеристики
Рис.
2.9
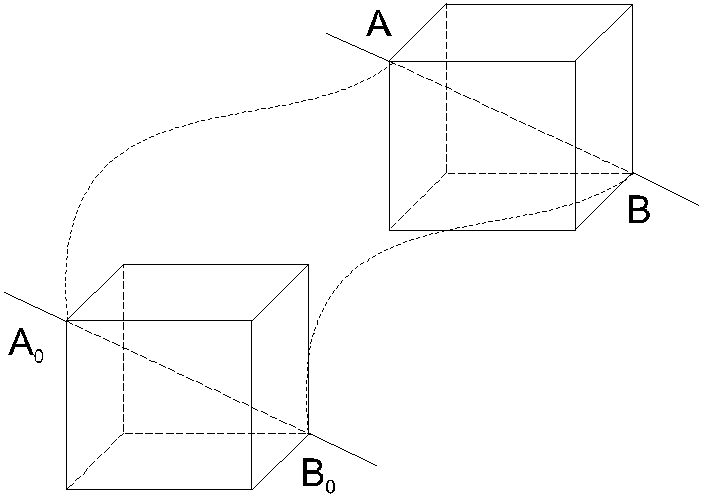
При
поступательном движении твердого тела
все его точки перемещаются совершенно
одинаково: за
малое время dt
радиус-векторы
этих точек изменяются на одну и ту же
величину
![]() .
Соответственно в каждый момент времени
скорости
всех точек тела одинаковы и равны
.
Соответственно в каждый момент времени
скорости
всех точек тела одинаковы и равны
![]() ,
а следовательно, одинаковы и их ускорения.
Поэтому кинематическое рассмотрение
поступательного движения твердого тела
сводится
к изучению движения любой из его точек.
Обычно
в качестве такой точки выбирают так
называемый центр
масс (или центр инерции) тела.
Определение этого понятия будет введено
ниже, в динамике.
,
а следовательно, одинаковы и их ускорения.
Поэтому кинематическое рассмотрение
поступательного движения твердого тела
сводится
к изучению движения любой из его точек.
Обычно
в качестве такой точки выбирают так
называемый центр
масс (или центр инерции) тела.
Определение этого понятия будет введено
ниже, в динамике.
Таким образом, кинематическими характеристиками поступательного движения твердого тела являются уже рассмотренные выше соответствующие характеристики материальной точки.
2.2.2. Вращение твердого тела вокруг неподвижной оси и его кинематические характеристики
Рис.
2.10

При
вращении, в отличие от поступательного
движения, скорости
![]() и ускорения
и ускорения![]() в общем случае у разных точек тела
неодинаковы. Поэтому эти характеристики
(иногда их называют линейной скоростью
и линейным ускорением) не могут служить
в качестве кинематических характеристик
вращения всего тела в целом.
в общем случае у разных точек тела
неодинаковы. Поэтому эти характеристики
(иногда их называют линейной скоростью
и линейным ускорением) не могут служить
в качестве кинематических характеристик
вращения всего тела в целом.
К основным кинематическим характеристикам вращения твердого тела относятся угол поворота, угловая скорость и угловое ускорение.
Пусть
твердое тело вращается вокруг оси
![]() ,
неподвижной
в данной системе отсчета. Рассмотрим
бесконечно малый поворот тела вокруг
этой оси (рис. 2.11).
,
неподвижной
в данной системе отсчета. Рассмотрим
бесконечно малый поворот тела вокруг
этой оси (рис. 2.11).
Положение
произвольной точки M
этого тела зададим радиус-вектором
![]() ,
проведенным из точкиO
неподвижной оси вращения, принимаемой
за начало системы координат. Из рисунка
следует, что
,
проведенным из точкиO
неподвижной оси вращения, принимаемой
за начало системы координат. Из рисунка
следует, что
![]() ,
(2.39)
,
(2.39)
г де
де![]() - радиус-вектор, проведенный из центраО
окружности, по которой движется точка
M;
- радиус-вектор, проведенный из центраО
окружности, по которой движется точка
M;
![]()
![]() -
вектор, проведенный из начала координат
в центр окружности О'.
-
вектор, проведенный из начала координат
в центр окружности О'.
Рис.
2.11

![]() поворачивается на малый уголd.
На такой же угол поворачивается за время
dt
радиус-вектор любой другой точки тела.
Таким образом, угол поворота d
характеризует вращение всего твердого
тела за малый промежуток времени.
поворачивается на малый уголd.
На такой же угол поворачивается за время
dt
радиус-вектор любой другой точки тела.
Таким образом, угол поворота d
характеризует вращение всего твердого
тела за малый промежуток времени.
Для
того чтобы одновременно задать и угол
поворота тела и направление этого
поворота, вводят в рассмотрение вектор
![]() элементарного (малого) поворота тела,
численно равныйd
и
направленный вдоль оси вращения 00'
так, чтобы из его конца поворот тела был
виден происходящим против часовой
стрелки (рис. 2.11).
Начало вектора
элементарного (малого) поворота тела,
численно равныйd
и
направленный вдоль оси вращения 00'
так, чтобы из его конца поворот тела был
виден происходящим против часовой
стрелки (рис. 2.11).
Начало вектора
![]() может находиться в любой точке оси
вращения, например в точкеО.
Как видно на рис.2.11, направление
вектора
может находиться в любой точке оси
вращения, например в точкеО.
Как видно на рис.2.11, направление
вектора
![]() может быть также определено по правилу
правого винта: оно совпадает с направлением
поступательного движения правого винта,
вращающегося вместе с телом.
может быть также определено по правилу
правого винта: оно совпадает с направлением
поступательного движения правого винта,
вращающегося вместе с телом.
Единица угла поворота - радиан (рад).
Для характеристики вращения тела вокруг неподвижной оси вводится угловая скорость.
Угловой скоростью называется векторная величина, характеризующая изменение угла поворота в единицу времени и направление вращения тела вокруг неподвижной оси и равная первой производной от угла поворота по времени, то есть
 (2.40)
(2.40)
Из (2.40) следует, что модуль угловой скорости равен
 (2.41)
(2.41)
Как
следует из (2.40), что направление вектора
![]() совпадает с направлением вектора
совпадает с направлением вектора![]() .
.
Единица угловой скорости - радиан в секунду (рад/с).
Начало
вектора
![]() также может находиться в любой точке
оси вращения, например в точкеО'.
также может находиться в любой точке
оси вращения, например в точкеО'.
Вращение
тела называется равномерным, если модуль
угловой скорости не изменяется с течением
времени:
![]() .
В
этом случае зависимость угола поворота
от времени найдем интегрированием
выражения (2.41):
.
В
этом случае зависимость угола поворота
от времени найдем интегрированием
выражения (2.41):
 . (2.42)
. (2.42)
Для описания равномерного вращения тела вводятся еще две кинематические характеристики: период вращения и число оборотов в единицу времени.
Периодом вращения называется промежуток времени Т, в течение которого тело, равномерно вращаясь, совершает один полный оборот вокруг оси вращения.
Период вращения выражается в единицах времени, то есть в секундах (с).
Величина n обратная периоду Т, называется числом оборотов в единицу времени, то есть
![]()
 (2.43)
(2.43)
Очевидно, n измеряется в секундах в минус первой степени (с-1).
За один полный оборот тело поворачивается на угол 2, поэтому из (2.42) и (2.43) следует, что
![]() . (2.44)
. (2.44)
Для характеристики изменения угловой скорости при неравномерном вращении вводится угловое ускорение.
Угловым
ускорением называется векторная величина
![]() ,
характеризующая изменение угловой
скорости тела в единицу времени при
неравномерном вращении и равная первой
производной по времени от его угловой
скорости или второй производной по
времени от вектора поворота, то есть
,
характеризующая изменение угловой
скорости тела в единицу времени при
неравномерном вращении и равная первой
производной по времени от его угловой
скорости или второй производной по
времени от вектора поворота, то есть
 (2.45)
(2.45)
Единица углового ускорения - радиан, деленный на секунду в квадрате (рад/с2).
 Рис.
2.12
Рис.
2.12![]() ,
поэтому вектор
,
поэтому вектор![]() направлен вдоль оси вращения, в ту же
сторону, что и
направлен вдоль оси вращения, в ту же
сторону, что и![]() .
При замедленном вращении
.
При замедленном вращении![]() ,
поэтому направление вектора
,
поэтому направление вектора![]() противоположно направлению вектора
противоположно направлению вектора![]() (рис 2.12). На этом рисунке
(рис 2.12). На этом рисунке![]() - угловая скорость в начальный момент
времени, а
- угловая скорость в начальный момент
времени, а![]() - в произвольный момент времени.
- в произвольный момент времени.
При
равнопеременном вращении
![]() .
Интегрируя выражение (2.45) для модуля
угловой скорости, получим:
.
Интегрируя выражение (2.45) для модуля
угловой скорости, получим:
![]() ,
(2.46)
,
(2.46)
где
![]() - модуль угловой скорости в момент
времени принятый за начальный (t=0).
- модуль угловой скорости в момент
времени принятый за начальный (t=0).
Подставим (2.46) в формулу (2.41) и проинтегрируем, тогда для модуля угла поворота получим выражение
 (2.47)
(2.47)