

3.2.2. Основной закон динамики твердого тела, вращающегося вокруг неподвижной оси
Выше
было отмечено, что твердое тело можно
мысленно представить в виде системы
материальных точек. Рассмотрим тело,
состоящее из n
материальных
точек. Будем считать, что тело (рис. 3.9)
может вращаться только вокруг оси Z.
Пусть
![]() -
масса
-
масса
![]() -ой
точки системы, а
-ой
точки системы, а
![]() -
радиус-вектор, проведенный в эту точку
из начала координат инерциальной системы
отсчета (точкаО).
Обозначим через
-
радиус-вектор, проведенный в эту точку
из начала координат инерциальной системы
отсчета (точкаО).
Обозначим через
![]() силу, действующую на
силу, действующую на
![]() -ую
точку
со стороны
-ую
точку
со стороны
![]() -ой
материальной точки системы, а через
-ой
материальной точки системы, а через![]() - равнодействующую всех внешних сил,
приложенных к
- равнодействующую всех внешних сил,
приложенных к
![]() -ой
точке.
-ой
точке.
По второму закону Ньютона уравнение движения этой материальной точки имеет вид
![]() .
(3.35)
.
(3.35)
Умножим
обе части этого уравнения слева векторно
на
![]() :
:
Рис.
3.9![]()

Знак
производной
![]() в левой части (3.35) можно вынести за знак
векторного произведения, так как
в левой части (3.35) можно вынести за знак
векторного произведения, так как
![]() ,
,
поскольку
![]() ,
как векторное произведение двух одинаково
направленных векторов.
,
как векторное произведение двух одинаково
направленных векторов.
Следовательно, уравнение (3.36) можно переписать в виде
![]() . (3.37)
. (3.37)
Перепишем уравнение (3.37) с учетом введенных выше динамических характеристик (3.18) и (3.22)
![]() (3.38)
(3.38)
и просуммируем по всем n материальным точкам системы:
![]() . (3.39)
. (3.39)
Векторная
сумма моментов
![]() всех внешних сил, приложенных ко всем
материальным точкам системы, называется
результирующим моментом
всех внешних сил, приложенных ко всем
материальным точкам системы, называется
результирующим моментом![]() внешних сил относительно точкиO:
внешних сил относительно точкиO:
![]() . (3.40)
. (3.40)
Векторная
сумма моментов
![]() относительно точкиО
всех внутренних сил
относительно точкиО
всех внутренних сил
![]() взаимодействия между материальными
точками системы равна нулю:
взаимодействия между материальными
точками системы равна нулю:
 . (3.41)
. (3.41)
Это
объясняется тем, что по третьему закону
Ньютона силы
![]() и
и![]() равны по модулю, имеют общее направление
действия, но направлены в противоположные
стороны. Поэтому моменты этих сил взаимно
компенсируют друг друга, то есть
равны по модулю, имеют общее направление
действия, но направлены в противоположные
стороны. Поэтому моменты этих сил взаимно
компенсируют друг друга, то есть
![]() .
(3.42)
.
(3.42)
На основании соотношений (3.23), (3.40) и (3.41) можем переписать уравнение (3.39):
![]() .
(3.43)
.
(3.43)
Уравнение
(3.43) может быть записано и для составляющих
векторов
![]() и
и![]() на ось вращенияZ
на ось вращенияZ
![]() . (3.44)
. (3.44)
Это уравнение называется основным законом динамики твердого тела, вращающегося вокруг неподвижной оси (закон изменения момента импульса относительно неподвижной оси):
скорость изменения момента импульса тела относительно неподвижной оси вращения равна результирующему моменту относительно этой оси всех действующих на него внешних сил.
С учетом выражения (3.30) уравнение (3.44) можно представить в виде
![]() (3.45)
(3.45)
или
![]() , (3.46)
, (3.46)
откуда с учетом (2.45) можем записать
 (3.47)
(3.47)
Из уравнения (3.47) следует, что угловое ускорение твердого тела, вращающегося вокруг неподвижной оси, прямо пропорционально результирующему моменту относительно этой оси всех внешних сил, действующих на тело, и обратно пропорционально моменту инерции тела относительно этой же оси.
Кроме
того, из уравнения (3.47) следует, что
угловое ускорение
![]() совпадает по направлению с результирующим
моментом
совпадает по направлению с результирующим
моментом![]() всех
внешних сил.
всех
внешних сил.
3.2.3. Гироскоп. Понятие о гироскопическом эффекте
Гироскопом называется осесимметричное тело, быстро вращающееся вокруг оси симметрии, которая может изменять свое положение в пространстве.
Р
 Рис.
3.10
Рис.
3.10![]() ,
стремящихся повернуть его вокруг осиоy.
Опыт
показывает, что в этом случае наблюдается
интересный эффект - ось гироскопа
поворачивается не вокруг оси оy,
а вокруг оси оz.
Описанный эффект получил название
гироскопического
и
состоит в том, что ось гироскопа
поворачивается в сторону момента внешних
сил
,
стремящихся повернуть его вокруг осиоy.
Опыт
показывает, что в этом случае наблюдается
интересный эффект - ось гироскопа
поворачивается не вокруг оси оy,
а вокруг оси оz.
Описанный эффект получил название
гироскопического
и
состоит в том, что ось гироскопа
поворачивается в сторону момента внешних
сил
![]() ,
а не в направлении действия сил (рис
3.10). Движение оси гироскопа называется
прецессией.
Покажем, что гироскопический эффект
объясняется основным законом динамики
вращательного движения. При быстром
вращении гироскопа угловая скорость
прецессии оказывается значительно
меньше угловой скорости гироскопа.
Поэтому можно считать, что вектор
результирующей угловой скорости
направлен практически по оси ох
и равен по модулю .
Ось симметрии гироскопа является его
главной осью инерции и, следовательно,
момент импульса гироскопа также направлен
вдоль этой оси и равен
,
а не в направлении действия сил (рис
3.10). Движение оси гироскопа называется
прецессией.
Покажем, что гироскопический эффект
объясняется основным законом динамики
вращательного движения. При быстром
вращении гироскопа угловая скорость
прецессии оказывается значительно
меньше угловой скорости гироскопа.
Поэтому можно считать, что вектор
результирующей угловой скорости
направлен практически по оси ох
и равен по модулю .
Ось симметрии гироскопа является его
главной осью инерции и, следовательно,
момент импульса гироскопа также направлен
вдоль этой оси и равен
![]() ,
где
,
где![]() -
главный момент инерции гироскопа.
-
главный момент инерции гироскопа.
Приращение
вектора угловой скорости
![]() под действием момента пары сил
под действием момента пары сил![]() за
бесконечно малое время
за
бесконечно малое время![]() можно выразить из основного уравнения
динамики вращающегося тела (3.46):
можно выразить из основного уравнения
динамики вращающегося тела (3.46):
![]() . (3.48)
. (3.48)
Вектор
![]() момента сил
момента сил![]() направлен по оси
оy.
Из (3.48) следует, что вектор
направлен по оси
оy.
Из (3.48) следует, что вектор
![]() должен быть направлен также параллельно
осиоy
(рис.3.10).
Таким
образом, вектор
должен быть направлен также параллельно
осиоy
(рис.3.10).
Таким
образом, вектор
![]() ,
а вместе с ним и ось гироскопа, под
действием пары сил
,
а вместе с ним и ось гироскопа, под
действием пары сил![]() должны
вращаться вокруг оси оz.
должны
вращаться вокруг оси оz.
Угловую
скорость
![]() этого вращения можно определить, если
учесть, что угол
этого вращения можно определить, если
учесть, что угол![]() ,
на который повернется за время
,
на который повернется за время![]() вектор
вектор![]() ,
может быть выражен через
,
может быть выражен через![]() и
и![]() (как центральный угол, опирающийся на
дугу
(как центральный угол, опирающийся на
дугу![]() окружности радиусом
окружности радиусом![]() (рис.3.10)):
(рис.3.10)):
![]() .
(3.49)
.
(3.49)
Подставим
в (3.49) выражение для модуля вектора
![]() из (3.48), тогда получим
из (3.48), тогда получим
![]() .
(3.50)
.
(3.50)
Из выражения (3.50) находим угловую скорость прецессии:
 (3.51)
(3.51)
Отметим, что движение оси гироскопа (прецессия) не обладает инерцией - оно прекращается сразу же как только прекращается действие момента сил.
Р
 Рис.
3.11
Рис.
3.11![]() .
Тогда сила тяжести создает относительно
точки О момент, модуль которого равен
.
Тогда сила тяжести создает относительно
точки О момент, модуль которого равен
Рис. 3.12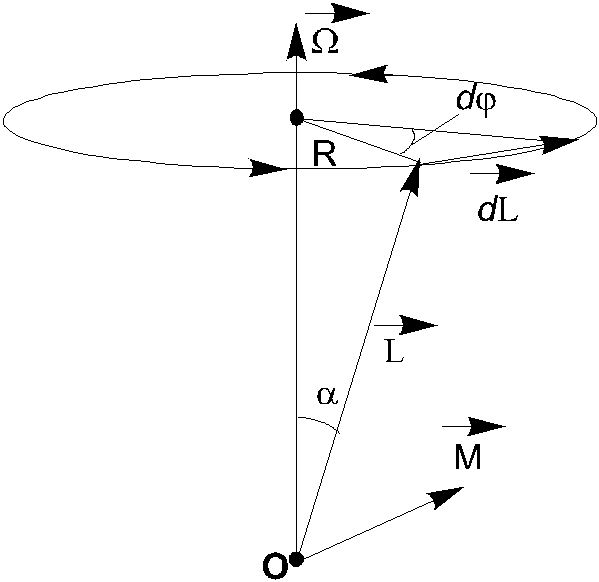
![]() , (3.52)
, (3.52)
где
-
![]() расстояние от центра тяжести волчка до
точки опоры О.
расстояние от центра тяжести волчка до
точки опоры О.
Этот
момент стремиться повернуть ось волчка
в положение более близкое к горизонтальному.
Однако волчок ведет себя иначе - его ось
начинает перемещаться в пространстве
так, что угол
![]() остается постоянным, то есть ось гироскопа
движется с постоянной угловой скоростью
по поверхности конуса с вершиной в точке
О (рис. 3.11). Определим угловую скорость
прецессии волчка. На рис. 3.12 показано
взаимное расположение вектора момента
импульса волчка
остается постоянным, то есть ось гироскопа
движется с постоянной угловой скоростью
по поверхности конуса с вершиной в точке
О (рис. 3.11). Определим угловую скорость
прецессии волчка. На рис. 3.12 показано
взаимное расположение вектора момента
импульса волчка![]() ,
совпадающее по направлению с его осью,
вектора
,
совпадающее по направлению с его осью,
вектора![]() - момента силы тяжести и вектора угловой
скорости прецессии оси волчка
- момента силы тяжести и вектора угловой
скорости прецессии оси волчка![]() .
В результате прецессии вектор
.
В результате прецессии вектор![]() описывает конус с основанием, радиус
которого равен
описывает конус с основанием, радиус
которого равен![]() .
Из основного уравнения динамики
вращательного движения (3.43) найдем
приращение вектора
.
Из основного уравнения динамики
вращательного движения (3.43) найдем
приращение вектора![]() за время
за время![]() :
:
![]() .
(3.53)
.
(3.53)
Модуль
приращения вектора
![]() ,
как следует из рис. 3.12, можно представить
в виде
,
как следует из рис. 3.12, можно представить
в виде
![]() . (3.54)
. (3.54)
Из
(3.53) найдем соотношение между модулями
векторов
![]() и
и![]() и учтем (3.54), тогда получим
и учтем (3.54), тогда получим
![]() ,
,
откуда находим угловую скорость прецессии оси волчка:
![]() .
(3.55)
.
(3.55)
Подставляя в формулу (3.55) выражение (3.52) и (3.30), окончательно получим
![]() . (3.56)
. (3.56)
Из формулы (3.56) следует, что угловая скорость прецессии оси волчка не зависит от угла между его осью и вертикалью.
Заметим, что приведенное описание движения оси гироскопа и волчка справедливо в том случае, когда угловая скорость прецессии значительно меньше угловой скорости вращения самого волчка.