

Приложение 5
Номограмма А.В. Фатеева

Приложение 6
Принципиальные схемы и передаточные функции корректирующих устройств на операционных усилителях
|
Схема |
Передаточная функция |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|






Варианты реализации некоторых передаточных функций на пассивных четырёхполюсниках приведены ниже.

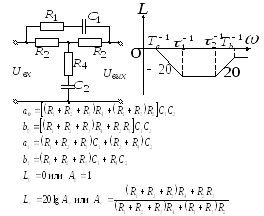
Постоянные времени
![]() и
и![]() знаменателя передаточной функции
четырёхполюсника
знаменателя передаточной функции
четырёхполюсника![]() определяются по формулам:
определяются по формулам:
если
![]() ,
то
,
то![]() и
и![]() ;
;
если
![]() ,
то
,
то![]() .
.
Аналогично находятся
постоянные времени для числителя
передаточной функции
![]() :
:
если
![]() ,
то
,
то![]() и
и![]() ;
если
;
если![]() ,
то
,
то![]() .
.
При использовании пассивного четырёхполюсника следует помнить о необходимости применения отдельного операционного усилителя для развязывания звеньев между собою и компенсации уменьшения общего коэффициента усиления.
Приложение 7
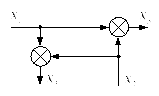
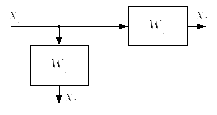
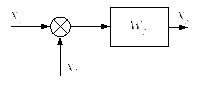
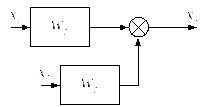
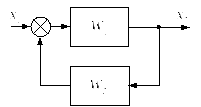
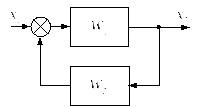
Правила преобразования структурных схем линейных систем
|
Операция |
Исходная схема |
Эквивалентная схема |
|
Перестановка сумматоров или элементов сравнения |
|
|
|
Перестановка звеньев |
|
|
|
Перенос узла с выхода на вход сумматора |
|
|
|
Перенос узла со входа на выход сумматора |
|
|
|
Перенос узла с выхода на вход звена |
|
|
|
Перенос узла со входа на выход звена |
|
|
|
Перенос сумматора с выхода на вход звена |
|
|
|
Перенос сумматора со входа на выход звена |
|
|
|
Замена звеньев прямой и обратной цепей |
|
|
|
Переход к единичной обратной связи |
|
|












Рекомендуемые источники информации
Бесекерский В.А., Попов Е.П. Теория систем автоматического управления. СПб, «Профессия», 2003.
Клиначев Н.В. Теория систем автоматического регулирования: учебно-методический комплекс. Челябинск, 2003.
Сборник задач по теории автоматического регулирования и управления. Под редакцией В.А Бесекерского Москва, «Наука», 1978.
Литюга А.М., Клиначёв Н.В., Мазуров В.М. Теоретические основы построения эффективных АСУ ТП. Конспект лекций. Тула, Челябинск, 2002.
Васильев Д.В., Чуич В.Г. Системы автоматического управления. Москва, «ВШ», 1967.
Хоровиц П., Хилл У. Искусство схемотехники. В 3 т. Пер. с англ. Москва, «Мир», 1993.