

Вопросы для самопроверки
Что такое переходная характеристика (функция)?
Что такое импульсная характеристика (функция)?
Перечислите основные способы получения переходной характеристики. Укажите достоинства и недостатки указанных подходов.
Дайте определения критериев качества
 ,
, ,
, .
.
Синтез систем автоматического управления
Итак, задача анализа исходной системы достигнута: проверена устойчивость, получены переходные процессы системы, иллюстрирующие поведение системы при подаче на её вход единичного ступенчатого воздействия, оценены показатели качества.
Как было уже отмечено выше, в этой работе синтез трактуется как некоторая инженерная задача, сводящаяся к определению вида и параметров корректирующих средств, которые необходимо добавить к неизменяемой части системы, чтобы обеспечить автоматической системе требуемые динамические качества.
Существует несколько путей для синтеза:
метод логарифмических амплитудных характеристик (ЛАХ);
корневой метод;
метод корневого годографа;
моделирование на ЭВМ.
В предлагаемой работе синтез корректирующего устройства проводится методом ЛАХ – наиболее простым и наглядным из перечисленных выше.
При инженерном синтезе автоматических систем пользуются известными методами улучшения качества регулирования. Под улучшением качества регулирования, как правило, понимается:
повышение статической точности;
увеличение запаса устойчивости и быстродействия системы.
Повышение точности
Самым универсальным и эффективным методом повышения статической точности является увеличение коэффициента передачи разомкнутой системы. Это можно сделать либо путём введения в систему промежуточных усилителей, либо за счёт увеличения коэффициентов усиления её отдельных звеньев.
Рассмотрим причину
снижения статической ошибки при
увеличении коэффициента передачи
разомкнутой системы на примере системы
ТП-Д. Ошибка называется статической,
если система находится в установившемся
режиме работы (![]() )
при постоянных управляющем и возмущающем
воздействиях.
)
при постоянных управляющем и возмущающем
воздействиях.
Структурная схема системы ТП-Д в установившемся режиме показана на рис.28.
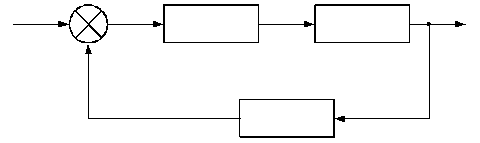
Рис. 28. Структурная схема системы ТП-Д в установившемся режиме
Найдем передаточную
функцию системы ТП-Д по ошибке
![]() .
Для этого преобразуем исходную структуру
(рис. 28) к виду, показанному на рис.29.
.
Для этого преобразуем исходную структуру
(рис. 28) к виду, показанному на рис.29.

Рис.29. Схема к определению статической ошибки в системе ТП-Д.
По этой структурной схеме составляем передаточную функцию системы по ошибке
![]() ,
,
где
![]() – общий (кольцевой) коэффициент передачи
системы.
Отсюда видно, что при
возрастании
– общий (кольцевой) коэффициент передачи
системы.
Отсюда видно, что при
возрастании![]() ,
статическая ошибка
,
статическая ошибка![]() убывает. Однако увеличение коэффициента
передачи приводит к приближению системы
к границе устойчивости.
убывает. Однако увеличение коэффициента
передачи приводит к приближению системы
к границе устойчивости.
Факт снижения устойчивости при увеличении коэффициента передачи в нашем примере подтверждается с помощью критерия Гурвица. Характеристическое уравнение системы ТП-Д имеет вид:
![]() .
.
Условие устойчивости системы сводится к неравенству:
![]() или
или
![]() . (12)
. (12)
Коэффициенты
![]() ,
,![]() ,
,![]() зависят от постоянных времени системы,
а коэффициент
зависят от постоянных времени системы,
а коэффициент![]() в случае разомкнутой системы равен
единице. Передаточная функция замкнутой
системы ТП-Д с единичной отрицательной
обратной связью имеет вид:
в случае разомкнутой системы равен
единице. Передаточная функция замкнутой
системы ТП-Д с единичной отрицательной
обратной связью имеет вид:
![]() .
.
Раскрывая скобки знаменателя, получаем следующее характеристическое уравнение:
![]() .
.
В этом случае
коэффициент
![]() ,
следовательно, чем больше кольцевой
коэффициент передачи системы, тем хуже
выполняется неравенство (12).
,
следовательно, чем больше кольцевой
коэффициент передачи системы, тем хуже
выполняется неравенство (12).