

Элементы теории гироскопов
Приборы и системы, основной частью которых служит гироскоп, называют гироскопическими приборами и системами. Современные гироскопические приборы и системы представляют собой сложные электромеханические устройства, в которых использованы высокооборотные и асинхронные двигатели, безмоментные индуктивные чувствительные элементы, электронные, транзисторные и магнитные усилители, сельсинные и потенциометрические дистанционные передачи.
Гироскопические системы применяются в различных областях техники: в авиации, в морском флоте для целей навигации и автоматического управления; в артиллерии и на танках для определения курса, для стабилизации орудий и прицелов на выбранном направлении; в горнорудной и нефтяной промышленности, для прокладки шахт, при бурении скважин и др.
С помощью гироскопических систем определяют направление меридиана и истинной вертикали, измеряют угловые скорости и ускорения, а также линейную скорость движения различных объектов и координаты места их расположения.
Гироскопические приборы и системы по принципу действия делят на следующие основные группы: гироскопы с двумя и тремя степенями свободы, курсовые гироскопические системы, гироскопические стабилизаторы, гироскопические датчики направления истинной вертикали и инерциальные системы.
Гироскопические стабилизаторы используются в технике как самостоятельные системы и служат для стабилизации и управления самолета, космического летательного аппарата, антенны и т. п. на заданном направлении.
Курсовые гироскопические системы и датчики направления истинной вертикали представляют собой гироскопические стабилизаторы, корректируемые с помощью какого-либо чувствительного элемента (физический маятник, магнит, индукционный датчик), который обладает свойствами избирательности по отношению к направлению истинной вертикали или меридиана.
Инерциальные системы являются прецизионными и наиболее сложными гироскопическими устройствами, содержащими акселерометры или акселерометры-интеграторы, стабилизированные в пространстве с помощью курсовой системы и датчика направления истинной вертикали и выполняющие интегрирование ускорений, возникающих при движении самолета, с целью определения скорости полета и местоположения самолета относительно земли или в мировом пространстве.
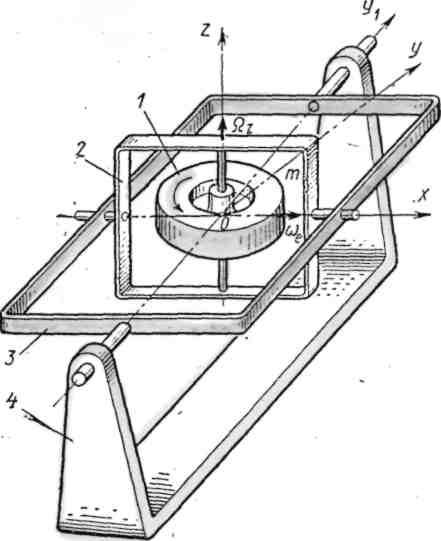
Рис.82.Гироскоп в кардановом подвесе:
1-ротор гироскопа; 2-внутренняя рамка карданова подвеса;
3-наружная рамка карданова подвеса; 4-подставка.

Рис.83.Гироскоп с тремя степенями свободы:
1—ротор; 2—ось собственного вращения; 3—внутренняя рама карданова подвеса; 4—внешняя рама карданова подвеса; 5— внутренняя ось подвеса; 6— внешняя ось подвеса
Кариолисово ускорение и гироскопический момент
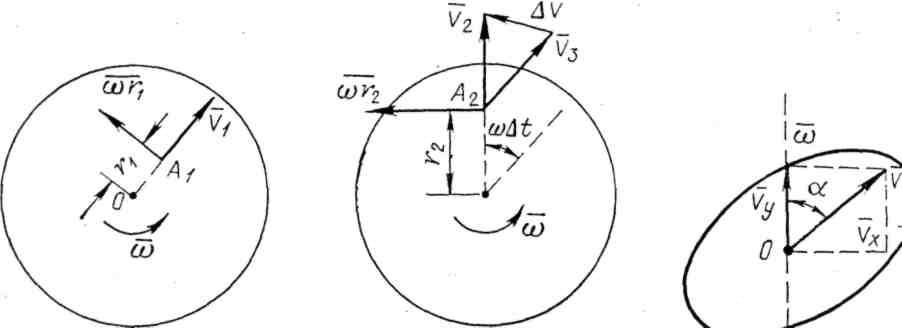
Предположим, что имеется плоскость, которая может поворачиваться вокруг некоторой точки О с угловой скоростью ω (рис. а). На этой плоскости пусть находится точка А, которая перемещается по радиусу с постоянной скоростью V1. Очевидно, точка А будет одновременно участвовать в двух движениях: переносном с угловой скоростью ω и относительном со скоростью V1.
t = t1 а) t = t2 б) в)
Рис.84.К определению ускорения Кориолиса
В момент времени t = t1 точка А находится в точке А1 отстоящей от центра вращения платформы на величину г1. Через некоторый малый промежуток времени Δt точка А окажется в положении А2 (рис. 6), куда она попадает в результате перемещения по плоскости на расстояние, равное V1 Δt, и повернется вместе с плоскостью на угол, равный ωΔt. Если в момент времени t=t1 переносная скорость точки А была равна ωг1, то при t = t1+ Δt = t2 она уже будет равна ωг2, где г2 — расстояние точки А от точки О при t=t2.
Совершенно очевидно, что ωг1< ωг2, т. е. произошло изменение переносной скорости за счет относительной, следовательно, в этом случае было ускорение
Таким образом, полное ускорение, которое возникает при участии какой-либо массы одновременно в двух движениях — относительном и переносном — выражается, как
aK = a1 + a2 = 2Vω
и называется поворотным или кориолисовым ускорением.
Направление действия кориолисового ускорения определяется поворотом вектора относительной скорости на 90° в сторону переносного вращения.