

Гироскоп с тремя степенями свободы как указатель ортодромического курса
Ортодромия дуга большого круга, плоскость которого проходит через центр земного шара и две заданные точки на поверхности Земли.
П оскольку
линия ортодромии это кратчайшее
расстояние между двумя точками на земной
поверхности,
оскольку
линия ортодромии это кратчайшее
расстояние между двумя точками на земной
поверхности,
полеты выгодно совершать по ортодромии. Однако ортодромия пересекает географические меридианы под неодинаковыми углами, поэтому для выдерживания ортодромического курса необходимо непрерывно измерять эти углы.
Гироскоп с тремя степенями свободы с кинетическим моментом, расположенным в плоскости
г
Рис.61.
ω = ωsinφ.
Режим гирополукомпаса (гпк)
Основной режим работы ТКС-П, при котором определяется ортодромический курс, режиме гирополукомпаса. В курсовой системе два абсолютно одинаковых гироагрегата, которые условно называются «Основной» и «Контрольный».
В режиме ГПК оба гироагрегата работают как гирополукомпасы, получая коррекцию на величину ωзsinφ от навигационного вычислителя или от пульта управления в зависимости от положения переключателя на пульте управления.
Внешняя ось карданова подвеса гироагрегатов стабилизируется в вертикальном положении по крену дополнительной рамой, управляемой от ЦГВ.
Ортодромический курс, вырабатываемый основным гироагрегатом, индицируется стрелкой К на указателе УШ-З, при этом тумблер «Осн.-Контр.» на пульте управления должен стоять в положении «Основной».
На лицевой стороне прибора имеются три светящихся табло: «МК», «ГПК», «АК», их назначение помочь экипажу определить, какой курс в данный момент показывает стрелка К. В режиме гирополукомпаса включено световое табло «ГПК».
Кроме стрелки К, на указателе УШ-З имеется треугольный подвижный индекс. Он показывает значение заданного путевого угла (ЗПУ). ЗПУ может вводиться автоматически от навигационного вычислителя или вручную кремальерой указателя УШ-З.
Указатель УШ-З предназначен также для указание текущего путевого угла (ПУ), который индицируете; стрелкой ПУ. Текущий путевой угол формируется в УШ-З как сумма ортодромического курса, выработанного гироагрегатом, и угла сноса, получаемого от ДИСС.
На указателе УШ-3 можно определить ортодромический курс, заданный путевой угол и угол сноса как разность ортодромического курса и текущего путевого угла.
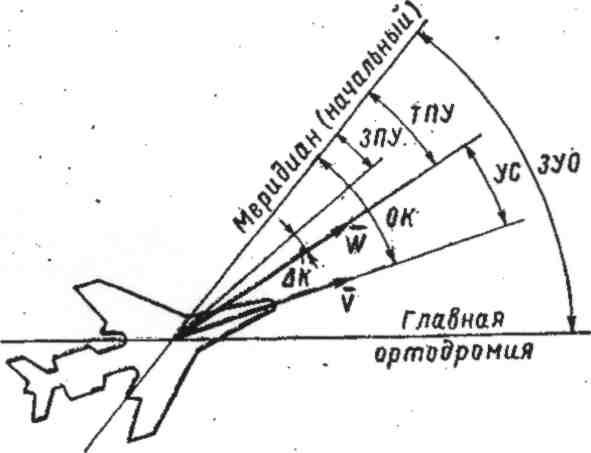
Рис.62.
ОК—ортодромический курс; УС—угол сноса; ЗПУ—заданный путевой угол; ТПУ—текущий путевой угол; ЗУО—заданный угол главной ортодромии; Δк—угловое отклонение от заданной линии пути; W—путевая скорость; V—воздушная скорость
 Рис.63.
Рис.63.
Навигационные индикаторы общие принципы построения навигационных индикаторов
Одной из основных задач воздушной навигации является определение текущего местоположения самолет относительно заранее выбранной системы координат.
Местоположение самолета может быть определен различными методами: визуально, с помощью либо радиотехнических или астросредств.
Перечисленные методы имеют существенный недостаток, заключающийся в том, что все они требуют либо определенных метеорологических условий, либо дополнительного наземного оборудования района полетов.

Рис.64.
Штурман воздушного судна имеет возможность определения текущего местоположения самолета методом счисления пути, сущность которого заключается в том, что штурман, зная скорость полета, направление и время полета, откладывает на карте отрезки пройденного пути, на которых скорость и направление полета. навигационного индикатора оставались постоянными.
Автоматические устройства, выполняющие эти же операции, получили название автоштурманов или навигационных индикаторов. В основу работы этих устройств положены уравнения счисления текущих координат места самолета в прямоугольной системе координат.
Пусть ВОС некоторая прямоугольная система координат, в которой происходит определение текущего местоположения самолета. В общем случае система ВОС может быт повернута относительно географической системы координа «Север - Восток» на некоторый угол φк, отсчитываемый от северного направления меридиана по часовой стрелке. В момент начала счисления пройденного пути самолет находится точке 0 с координатами Во и Со, имея путевую скорость W, истинную воздушную скорость V, истинный курс γи, при этом на высоте полета направление ветра U определяется углом δ, отсчитываемым тоже от северного направления меридиана по часовой стрелке; здесь угол ε — угол сноса. Осуществляя непрерывное интегрирование вектора путевой скорости, получаем текущее местоположение самолета.
Как видно из рис., если известен вектор путевой скорости W и угол сноса £, то текущие координаты самолета в системе БОС можно определить следующим образом:
В=ВО
+
![]()
С=СО
+