

Принцип действия автопилота при стабилизации высоты полета самолета
Стабилизация высоты полета является одной из основных задач при автоматическом управлении самолетом, и она не может быть решена стабилизацией угла тангажа. Например, если самолет попадает в вертикально восходящий поток ветра, то через некоторый промежуток времени он приобретает скорость ветра и начинает подниматься вверх, сохраняя заданное значение угла тангажа и заданное отклонение руля высоты.
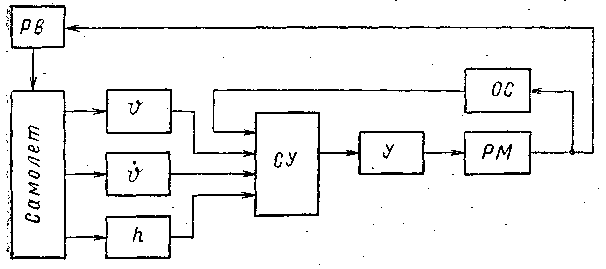
В настоящее время применяется система стабилизации высоты полета, схема которой представлена на рисунке. Отклонение от заданной высоты полета измеряется с помощью датчика высоты барометрического типа.
Сигнал, пропорциональный отклонению высоты полета от заданного значения (h = Н—Н3), с датчика h подается на СУ канала руля высоты. Этот сигнал вызывает отклонение руля высоты, вследствие чего происходит поворот продольной оси и изменение угла атаки. С изменением угла атаки происходит приращение подъемной силы, которое вызывает поворот вектора скорости в вертикальной плоскости и появление вертикальной составляющей скорости. За счет этой составляющей уменьшаются отклонение высоты от заданного значения и сигнал, соответствующий этому отклонению. Сигнал датчика угла тангажа изменяется в зависимости от угла тангажа.
При некотором отклонении высоты от заданного значения сигнал датчика высоты уменьшается настолько, что становится меньше сигнала датчика тангажа. Руль высоты в этом случае отклоняется в противоположную сторону. Это вызывает поворот продольной оси в противоположном направлении и приращение подъемной силы другого знака. Под действием такого приращения подъемной силы вектор скорости поворачивается к горизонтальному положению и занимает его снова в момент, когда высота полета достигает заданного значения.
Здесь принцип стабилизации высоты полета рассмотрен упрощенно. В действительности, самолет возвращается к заданной высоте с некоторыми колебаниями. Уменьшению амплитуды колебаний и времени переходного процесса способствует сигнал, поступающий с датчика угла тангажа. Поэтому сигнал, пропорциональный скорости отклонения высоты, в канале руля высоты отсутствует.
Бортовые системы управления полетом самолета
Управление самолетом может быть ручным, автоматическим и автоматизированным.
При ручном управлении пилот получает информацию о положении самолета в пространстве и сопоставляет ее с величинами требуемых параметров в данный момент полета. После принятия определенного решения он активно воздействует на рычаги управления и выводит самолет в требуемое положение. Таким образом, при ручном управлении образуется замкнутый контур «приборы-пилот—органы управления—самолет». Качество управления самолетом в этом случае зависит не только от точности показаний приборов, но и в значительной мере от занятости, физической нагрузки и субъективных качеств пилота.
При автоматическом управлении пилот контролирует действия системы. При необходимости он изменяет программу работы или отключает систему, т. е. он находится вне замкнутого контуре управления. Примером такой системы является работа автопилота в режиме стабилизации.
Автоматизированная система занимает промежуточное положение между системами ручного и автоматического управления Она обеспечивает формирование необходимых командных сигналов. Пилот использует их и осуществляет управление самолетом т. е. он выполняет функции усилительного звена системы. В этом случае пилот освобождается от выполнения логических операции по управлению самолетом.
Преимущества автоматических устройств при выполнении конкретных операций навигационного процесса не умаляют ведущее роли человека на пилотируемом летательном аппарате. Человек обладает целым рядом психофизических свойств, позволяющих решить задачи управления в условиях, когда автоматика оказывается неэффективной.
К таким свойствам относятся:
-большой диапазон воспринимаемых сигналов;
-способность к инициативе в случаях резкого изменение обстановки, требующих творческого решения задачи;
-длительная память, позволяющая учитывать накопленный опыт, и другие.
Таким образом, управление самолетом в современных и ближайших перспективных условиях развития авиации можно представить как автоматизированное управление самолетом при участии и под контролем человека.