

Принципы построения и действия автопилота
Автопилот предназначен для автоматической стабилизации самолета на траектории и дистанционного управления его положением в пространстве. Тип самолета, его назначение и динамические характеристики оказывают определяющее влияние на построение функциональной схемы автопилота.
Функции автопилотов пассажирских и транспортных самолетов сводятся к обеспечению автоматического пилотирования на маршруте полета. Автопилоты, применяемые на скоростных и маневренных самолетах, обладают более широкими возможностями. Они стабилизируют самолет на заданной траектории, обеспечивают дистанционное управление относительно трех осей самолета и автоматически выводят его в режим горизонтального полета.
В процессе стабилизации и управления самолётом возникает неразрывная связь движений самолёта и автопилота. Автопилот вместе с самолётом составляет единую замкнутую систему автоматического регулирования, где автопилот является регулятором, а самолёт объектом регулирования. В отношении выбора схемы и параметров стабилизация и управление самолётом с помощью автопилота представляет собой задачу автоматического регулирования. Изучить действие автопилота невозможно без знания основ аэродинамики самолёта - объекта регулирования.
Выбор схемы автопилота, конструкции его элементов и в значительной мере его параметров определяется назначением автопилота. Задачи, выполняемые автопилотом, весьма разнообразны. В авиации автопилот облегчает работу лётчика, заменяя его во всех режимах полета самолета.
Разнообразие применения, сложность законов движения самолёта и автопилота создают исключительные трудности точного решения задач по расчёту, выбору схем и проектированию автопилотов. При этом для упрощения разделяют полные взаимосвязанные уравнения движения самолёта на два изолированных движения - движения центра масс самолёта и движение вокруг центра его масс. Далее взаимосвязанное движение самолёта вокруг центра масс делят на боковое и продольное движения и, наконец, даже боковое движение в первом приближении разделяют на изолированные движения рыскания и крена.
Схемы автопилотов, применяемых на самолётах, весьма разнообразны.
Различают, например, автопилоты с жёсткой обратной связью, без обратной связи, с эластичной обратной связью, с управлением по положению, по угловой скорости, и угловому ускорению, по скорости полёта, по высоте полёта и др.
Пилотирование, осуществляемое с помощью автопилота, является важным и сложным процессом автоматического управления самолетом.
Задача автоматического пилотирования состоит в поддерживании заданного режима полета самолета.
Первоначально при автоматизации полета роль автопилота заключалась в частичной разгрузке пилота от пилотирования самолетом. Затем с помощью автопилота навигационных и других средств стала возможной полная автоматизация различных этапов полета, начиная от взлета и кончая посадкой. В этом случае пилотирование самолетом осуществляется только с помощью автопилота, который является составной частью общей автоматической бортовой системы управления.
Как бы не использовался автопилот, всюду он выполняет функции автоматического регулятора. Поэтому совокупность кинематических параметров движения самолета с автопилотом следует рассматривать как систему автоматического регулирования.
Автопилот обычно реагирует на отклонения регулируемых параметров от их заданных значений. В зависимости от величины и знака отклонений автопилот воздействует на органы управления самолета так, чтобы возникшие отклонения уменьшить до допустимых значений или ликвидировать полностью.
Самолет как объект управления по отношению к угловым движениям является системой с тремя степенями свободы. Поэтому для управления самолетом автопилот должен иметь не менее трех каналов управления в соответствии с тремя органами управления рулем направления, рулем высоты и элеронами. Поэтому и каналы автопилота получили наименование: канал руля направления, канал руля высоты и канал элеронов. Указанные каналы могут быть связаны между собой и могут быть независимыми.
Обычно каналы автопилота построены не только по одинаковым функциональным схемам, но и содержат одинаковые отдельные устройства.
В общем случае функциональная схема одного из каналов управления автопилота вместе с самолетом представлена на рисунке.
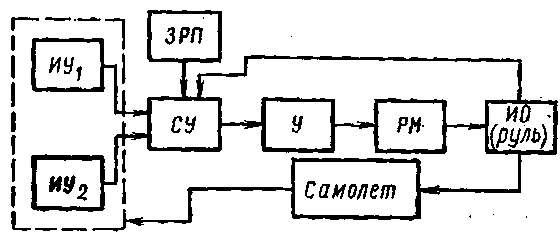
Рис.75.Функциональная схема одного из каналов автопилота
В нее входят: измерительные устройства (чувствительные элементы) (ИУ), суммирующие устройство (СУ), усилитель (У), рулевая машина (силовой привод) (РМ), исполнительный орган. Функциональная схема одного из каналов автопилота (ИО), задатчик режима полета (ЗРП). Следует заметить, что в некоторых автопилотах не удается выделить его элементы в те звенья, которые изображены на рис. 1. Так, например, может случиться, что суммирующее и усилительное устройство представляют собой один элемент или могут быть дополнительные промежуточные элементы в схеме автопилота. Тем не менее в общем случае функциональную схему каждого канала автопилота целесообразно представлять именно в таком виде, так как она поясняет основной состав и назначение отдельных звеньев существующих автопилотов.
Рассмотрим назначение отдельных звеньев. Измерительные устройства являются чувствительными элементами канала автопилота, воспринимающими отклонения самолета от заданного положения.
В качестве измерительных устройств в автопилотах широко используются гироскопические приборы, реагирующие на угловые отклонения самолета и их производные. Например, трехстепенной гироскоп определяет угловое отклонение самолета, двухстепенный — угловую скорость.
Помимо приборов, непосредственно измеряющих углы и их производные, в автопилотах широко используются различного типа дифференцирующие и интегрирующие устройства.
Для измерения линейных отклонений, например, высоты, применяется барометрическое устройство, аналогичное высотомеру.
Гироскопические измерительные устройства обладают тем преимуществом, что они являются безинерционными звеньями, т. е. измерение регулируемого параметра производится без запаздывания.
Суммирующее устройство служит для алгебраического сложения сигналов, поступающих от измерительных устройств, устройств обратной связи и задатчика режима полета.
В качестве суммирующего устройства в современных автопилотах широко используются потенциометрические и мостовые схемы, а также магнитные усилители, которые, помимо суммирования входных сигналов, усиливают их.
Усилитель служит для усиления сигналов до величины, способной управлять рулевой машиной. В современных автопилотах усилитель электронный представляет собой комбинацию магнитного усилителя с электронным и имеет несколько каскадов, обеспечивающих усиление суммарного сигнала как по величине, так и по мощности.
Рулевая машина является исполнительным органом автопилота и служит для привода руля самолета в соответствие с заданным законом управления.
В современных автопилотах применяются как электромеханические, так и электрогидравлические рулевые машины.
Устройство обратной связи и за датчик режима полета в большинстве автопилотов выполнены в виде потенциометрических датчиков, преобразующих в первом случае угол отклонения руля в электрическое напряжение, а во втором случае—угол поворота рукоятки управления также в электрическое напряжение.
Указанные звенья автопилота при рассмотрении законов управления будем полагать безынерционными.
Автопилоты принято классифицировать по следующим основным признакам.
1.По виду обратной связи различают:
-автопилоты с жесткой отрицательной обратной связью;
-автопилоты с обратной связью по скорости отклонения исполнительного органа;
-автопилоты без обратной связи;
-автопилоты со специальными видами обратной связи.
Наиболее широкое распространение получили автопилоты с жесткой обратной связью.
В автопилотах с жесткой обратной связью положение рулевых поверхностей пропорционально сигналам на входе управляющего устройства.
Автопилоты со скоростной обратной связью выдают управляющие сигналы, пропорциональные скорости изменения параметров движения самолета.
Изодромные автопилоты в установившемся режиме ведут себя как автопилоты с жесткой обратной связью, а в переходных режимах — как автопилоты со скоростной обратной связью.
2.По законам управления различают:
-автопилоты, в которых осуществляется регулирование по угловым отклонениям;
-автопилоты, в которых осуществляется регулирование по угловым отклонениям и их производным;
-автопилоты, в которых осуществляется регулирование по угловым отклонениям и первым двум производным от них;
-автопилоты, в которых осуществляется регулирование по угловым отклонениям и их производным, а также и по линейным параметрам.
Закон управления и вид обратной связи зависит от назначения автопилота и определяется из статистического и динамического анализов системы регулирования «самолет-автопилот» с учетом технической реализации необходимых конструкций.
3.По виду используемой энергии различают автопилоты пневматические, пневмогидравлические, электрогидравлические и электрические.
В настоящее время наиболее распространены электрические автопилоты, в которых все звенья выполнены с использованием электрических и электронных элементов.
Датчиками сигналов стабилизации самолета на траектории служат трехстепенные, скоростные или ускорительно-скоростные гироскопы. В зависимости от рода потребляемой энергии автопилоты подразделяются на электрические и гидравлические.
Автопилот АП-6Е стабилизирует самолет на траектории полета относительно трех его осей, автоматически выдерживает ортодромический курс, выполняет координированные развороты, доворачивает самолет на цель по сигналам стабилизатора прицела и выполняет необходимые эволюции самолета при дистанционном управлении с пульта.
Автопилоты могут работать в режиме согласования, стабилизации или управления. Режим согласования обеспечивается работой механизма согласования, который осуществляет компенсацию входных сигналов после включения комплекта автопилота. Этот режим необходим для подготовки к переключению на работу в режиме стабилизации и управления. Окончание режима согласования сигнализируется лампочкой или световым табло. В качестве измерительных элементов, реагирующих на изменение угловых координат, используются гирополукомпас или гироагрегат системы КС-6 и центральная гировертикаль ЦГВ-4. Угловые скорости движения самолета относительно его трех осей измеряются скоростными гироскопами, объединенными в блок демпфирующих гироскопов (БДГ). Потенциометрический барометрический корректор высоты KB-11 обеспечивает выдачу сигналов рассогласования, пропорциональных разности между фактической и заданной высотами полета.
Автопилот имеет три идентичных канала управления, которые отличаются друг от друга лишь типами используемых датчиков и структурой управляющих сигналов. Сервопривод каждого канала состоит из мостовой схемы, усилителя (У), дискриминатора, сервоусилителя (УМ) и рулевой машины (РМ).
Параметры управления вырабатываются в виде электрических сигналов рассогласования в потенциометрических мостовых схемах каждого канала. В сервоусилителе сигналы рассогласования усиливаются и преобразуются в электрические импульсы, длительность которых зависит от величины управляющего сигнала. Поступая на электродвигатели рулевых машин, они управляют режимом отклонения рулевых поверхностей. Под действием возникающих аэродинамических моментов самолет возвращается в исходное положение. С потенциометра, имеющегося на барабане каждой рулевой машины, в мостовую схему поступает сигнал обратной связи Uoc. Отклонение рулевой поверхности происходит до тех пор, пока этим сигналом не скомпенсируется суммарный управляющий сигнал, поступающий в канал управления от датчиков.
Таким образом, следящая система с обратной связью обеспечивает пропорциональное отклонение рулевых поверхностей и угловое движение самолета при работе автопилота в режиме стабилизации.
Управление самолетом через автопилот осуществляется имеющимися на пульте управления рукоятками координированного разворота КДУ и «Спуск-подъем». При необходимости выполнения разворота пилот поворачивает рукоятку КДУ в нужную сторону. Канал гирополукомпаса или гироагрегата курсовой системы отключается, и сигналы с пульта управления поступает в мостовые схемы каналов курса и крена. После суммирования этих сигналов с сигналами демпфирующих гироскопов и гировертикали образуется общий сигнал.
Рассмотрим различные законы управления, встречающихся в современных автопилотах самолетов гражданской авиации.
Угловое движение самолета влияет на перемещение центра масс и может менять траекторию его движения. Поэтому для обеспечения качественного управления центром масс необходимо в первую очередь иметь вполне определенное угловое положение самолета относительно центра масс, т. е. обеспечить угловую стабилизацию самолета.
Рассмотрение схем стабилизации целесообразно начать с простого и вместе с тем существенного случая, когда невозмущенное, стабилизируемое движение самолета является прямолинейным и установившимся. В таком случае основное назначение автопилота состоит в обеспечении устойчивости указанного движения и уменьшении нарушений заданного режима движения, вызванных непрерывно действующими возмущениями.
Для выполнения указанных требований автопилот должен иметь определенный закон управления, в котором отражается зависимость угла отклонения руля от управляющего сигнала, сформированного в счетно-решающем устройстве и состоящего из сигналов, поступающих от датчиков, корректирующих устройств, устройств обратных связей и задатчиков режима полета.
Угловое движение самолета складывается из его движений относительно всех трех координатных осей. В связи с этим наиболее качественной стабилизации самолета можно достичь при одновременном управлении всеми его рулями по сигналам, вызванным любым отклонением самолета от заданного режима полета. Такая сложная схема управления применяется в некоторых современных автопилотах.
Во многих случаях приходится решать частные задачи стабилизации какого-либо одного вида движения самолета. В этих случаях можно ограничиться измерением параметров, характеризующих рассматриваемый вид его движения, и осуществлять управление только теми рулями, которые непосредственно оказывают влияние на данный вид движения.
Рассмотрим законы управления, наиболее часто встречающиеся в каналах стабилизации различных автопилотов.
Рассмотрение начнем с бокового движения самолета.
Боковое движение самолета, состоит из двух взаимосвязанных движений по курсу и крену. Задача стабилизации этого движения осложняется тем, что в данном случае имеются два органа управления — руль направления и элероны, которыми можно управлять как раздельно, так и совместно.
Известно, что самолет как объект управления по отношению к заданному курсу является нейтрально устойчивым. Поэтому основной задачей автопилота при стабилизации бокового движения является обеспечение выдерживания самолетом заданного курса, Кроме того, автопилот должен обеспечивать определенную степень устойчивости самолета на этом курсе. Что касается стабилизации крена, то в прямолинейном полете она необходима лишь постольку, поскольку наличие крена вызывает отклонение самолета от заданного курса.
Параметрами, определяющими боковое движение самолета, являются боковая составляющая воздушной скорости Vz, углы скольжения β, рыскания ψ и крена γ. Следовательно, стабилизацию бокового движения можно осуществлять, измеряя все четыре указанных параметра. Однако при стабилизации бокового углового движения самолета, так же как и в случае продольного движения, можно ограничиться измерением только некоторых из указанных параметров. В качестве основных регулируемых величин выбираются угол рыскания и угол крена. Эти величины могут быть измерены сравнительно просто и достаточно точно.
Если рассматривать боковую стабилизацию самолета при условии совместного управления рулем направления и элеронами, то закон управления по угловому отклонению можно представить в виде
δн = кψ ψ + кн γ γ δэ = кγ γ + кэ ψ ψ
где: δн и δэ — углы отклонения руля направления и элеронов
соответственно; кн γ - передаточное число по углу крена в канале руля
направления; кэ ψ - передаточное число по углу рыскания в канале элеронов.
Вторые члены правых частей уравнений называются перекрестными связями автопилота.
С учетом угловых скоростей законы управления бокового канала автопилота принимают вид
δн = кψ ψ + кψ׳ ψ׳ + кн γ γ δэ = кγ γ + кγ׳ γ׳ + кэ ψ ψ
где: ψ׳; γ׳ — угловые скорости самолета по рысканию и по крену соответственно; кψ׳, кγ — передаточные числа по соответствующим угловым скоростям.
Если рассматривать боковое движение состоящим из двух раздельных движений по рысканию и крену, как это сделано, то законы управления бокового канала автопилота в этом случае не будут иметь перекрестных связей.
Автопилоты с законами управления относятся к статическим автопилотам. Сами законы управления также называются статическими. При таких законах управления; всегда будет иметь место остаточное отклонение самолета по углу при наличии постоянно действующего возмущающего момента МBY.

Рассмотрим принцип действия автопилота в соответствии с основной его задачей — стабилизацией основных угловых и линейных параметров самолета.