

-
Поняття часового лагу. Моделі з часовим лагом незалежних змінних.
Для багатьох економічних процесів типовим є те, що ефект від впливу деякого фактора на показник, який характеризує процес, виявляється не одразу, а поступово, через деякий період часу. Таке явище називається лагом (запізненням).
Потреба враховувати лаг під час кількісного вимірювання взаємозв’язку між економічними показниками постає дуже часто. Наприклад, у динамічних моделях необхідно враховувати лаг при визначенні зв’язку між обсягом продукції і капітальними вкладеннями, або частину цього лагу — будівельний.
Нехай економетрична модель розподіленого лагу визначається так:
![]()
де
![]() -
параметри моделі при лагових змінних;
-
параметри моделі при лагових змінних;
![]() - пояснювальна лагова змінна;
- період зрушення;
- пояснювальна лагова змінна;
- період зрушення;
![]() - залишки, що розподілені нормально,
тобто мають нульове математичне
сподівання і сталу дисперсію.
- залишки, що розподілені нормально,
тобто мають нульове математичне
сподівання і сталу дисперсію.
Модель називається загальною моделлю нескінченного розподіленого лагу, якщо для неї справджуються такі умови:
1)
![]() ,
для будь-яких k, j;
,
для будь-яких k, j;
2)
![]() ,
j = 1, 2, 3...; k = 1, 2, 3...;
,
j = 1, 2, 3...; k = 1, 2, 3...;
3)
![]() ,
де w — певне число;
,
де w — певне число;
4)
![]() ;
;
5)
![]() ,
,
![]() .
.
-
Авторегресійні моделі.
Авторегресійна модель має вигляд:
![]()
Ідентифікація порядку d різницевого ряду zt, t = 1,...,n’ = n – d виконується за допомогою тих самих засобів, що й для несезонних моделей. Порядок AR (p)-моделі можна обрати такий, що дорівнюватиме періоду сезонності, тобто р = т. У цьому разі її розмірність збігається із розмірністю моделі Вінтерса, параметри моделі набувають змісту індексів сезонності, але визначаються в інший спосіб (МНК). Кількість параметрів можна скоротити за рахунок несуттєвих за величиною впливу коефіцієнтів.
-
Оцінювання авторегресійних моделей з часовим лагом незалежних змінних.
Один із способів звільнитися від мультиколінеарності - це ввести такі коефіцієнти при лагових змінних, які мали б однаковий знак і для них можна було знайти суму. З урахуванням умов модель з розподіленим лагом набере такого вигляду:
![]()
Л. Койк запропонував вибрати для запису вагових коефіцієнтів форму спадної геометричної прогресії
![]() (10.11)
(10.11)
Звідси
![]() (10.12)
(10.12)
Якщо через D позначити оператор зрушення такий, що Dxt = xt–1, D2xt = xt–2 і т. д., то вираз (10.11) можна записати так:
![]() .
.
З урахуванням цього модель (10.12) матиме вигляд:
![]()
Для геометричного розподілу середній лаг
![]()
Входження до формули (10.12) лагового значення змінної Y може забезпечити досить добру апроксимацію моделі.
Розглянемо ще один підхід до розв’язування задачі вибору ваги для коефіцієнтів моделей при лагових пояснювальних змінних, який був запропонований Ширлі Алмон [2].
Нехай економетрична модель розподіленого лагу запишеться так:
![]() (10.15)
(10.15)
Це означає, що
пояснювальна змінна
![]() впливатиме на
впливатиме на
![]() протягом
періодів. Аби скористатися схемою вибору
протягом
періодів. Аби скористатися схемою вибору
![]() ,
необхідно визначити величину .
У попередньому розділі ми показали, як
це можна зробити, скориставшись взаємною
кореляційною функцією.
,
необхідно визначити величину .
У попередньому розділі ми показали, як
це можна зробити, скориставшись взаємною
кореляційною функцією.
За теоремою
Веєрштрасса значення параметрів моделі
апроксимують за допомогою деякої функції
![]() ,
яка запишеться у вигляді многочлена
від z:
,
яка запишеться у вигляді многочлена
від z:
![]()
Узявши s = 3 і а = 6, дістанемо таку схему для оцінювання параметрів моделі розподіленого лагу:
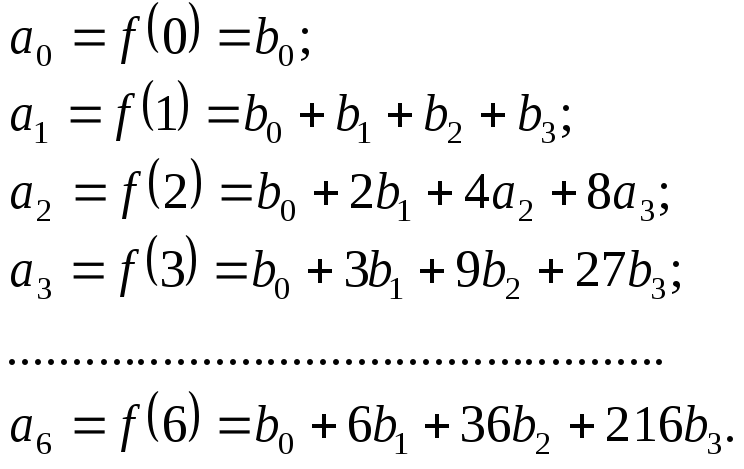 (10.16)
(10.16)
Це означає, що кожну
з оцінок параметрів моделі розподіленого
лагу подано через чотири невідомі
параметри многочлена:
![]() .
.
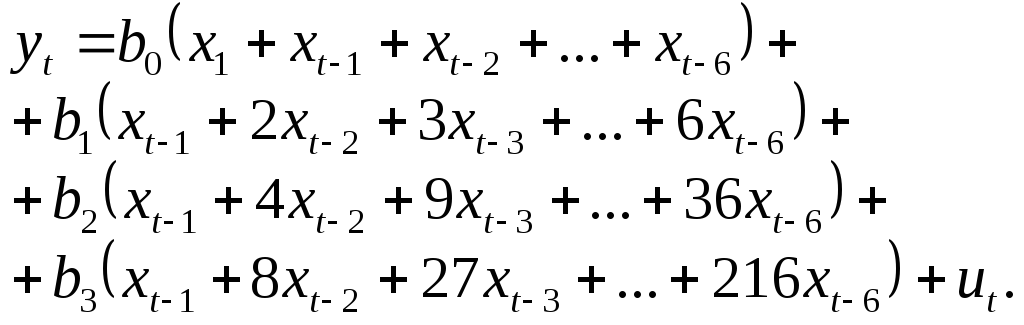
Підставивши оцінку з (10.16) в модель (10.15), дістанемо:
-
Автокореляція часового ряду, коефіцієнт автокореляці, автокореляційна функція.
Коефіцієнт автокореляції між зрушеними на
 рівнями часового ряду - це автоковаріація,
розділена на корінь із добутку двох
дисперсій, та оскільки дисперсія стала,
отримуємо просто
рівнями часового ряду - це автоковаріація,
розділена на корінь із добутку двох
дисперсій, та оскільки дисперсія стала,
отримуємо просто
 або
або
 .
Розраховують коефіцієнт автокореляції
за формулою:
.
Розраховують коефіцієнт автокореляції
за формулою:
![]() .
(1.2.8)
.
(1.2.8)
Вираз
(1.2.8) визначає автокореляційну
функцію (АКФ)
часового
ряду, яка показує наскільки статистично
залежними є значення часового ряду для
різних зрушень
![]() у часі (наприклад, для річних спостережень
рік чи два роки тощо).
Автокореляційна
функція стаціонарного часового ряду
залежить лише від різниці між двома
моментами часу
у часі (наприклад, для річних спостережень
рік чи два роки тощо).
Автокореляційна
функція стаціонарного часового ряду
залежить лише від різниці між двома
моментами часу
![]() ,
і є парною функцією, тобто
,
і є парною функцією, тобто
![]() .
Задаючи різні значення
.
Задаючи різні значення
![]() = 1, 2, 3,..., отримують послідовність значень
= 1, 2, 3,..., отримують послідовність значень
![]() ,
,
![]() ,
,
![]() ,...
Графік автокореляційної функції
називають корелограмою.
За корелограмою можна визначити
запізнення, із яким зміна показника
,...
Графік автокореляційної функції
називають корелограмою.
За корелограмою можна визначити
запізнення, із яким зміна показника
![]() позначається на його наступних значеннях.
позначається на його наступних значеннях.