

18.3. Потенциальная помехоустойчивость передачи непрерывных сообщений
Пусть
передается непрерывное сообщение a(t),
причём |a(t)|
≤ 1, а его мощность
![]() ;
в общем случаеa(t)
можно представить в виде разложения
;
в общем случаеa(t)
можно представить в виде разложения
![]() по единичным ортогональным составляющим
с коэффициентамиi.
Тогда сигнал S(t;
a)
= S(t;
λ1,
λ2,
…λn)
будет получать в процессе модуляции
приращения в соответствии с модуляционным
вектором определяющим
по единичным ортогональным составляющим
с коэффициентамиi.
Тогда сигнал S(t;
a)
= S(t;
λ1,
λ2,
…λn)
будет получать в процессе модуляции
приращения в соответствии с модуляционным
вектором определяющим
![]() свойства модулятора.
свойства модулятора.
С другой стороны, принятый сигнал S*(t) за счет действующей в канале помехи ξ(t) будет отличаться от переданного S(t). Как следствие этого, коэффициенты λi = λi + Δ λi также будут отличаться от переданных λi. В результате будем иметь
![]() ,
(18.15)
,
(18.15)
а
для погрешности передачи получим
![]() .
.
Оптимальный
приемник Котельникова измеряет расстояние
![]() .
.
Минимальному
значению R
соответствуют приращения Δλi*,
определяемые из условия
![]() ,
т.е.
,
т.е.
 .
(18.16)
.
(18.16)
На
основе (18.16) получаем выражение для
средней мощности шума на выходе приемника
![]() .
При слабых помехахξ(t)
спектральную мощность шума на выходе
можно представить в виде
.
При слабых помехахξ(t)
спектральную мощность шума на выходе
можно представить в виде
![]() ,
(18.17)
,
(18.17)
а Pε – соответственно
 .
(18.18)
.
(18.18)
Составим отношение средних мощностей сообщения и шума на выходе приемника
 .
(18.19)
.
(18.19)
Выражения (18.18) и (18.19) используются для сравнительной оценки потенциальной помехоустойчивости различных видов модуляции. В результате анализа получены следующие выражения Gε(ω) и h22.
Амплитудная модуляция S(t) = A[1 + ma(t)]cos ω0t
![]() .
(18.20)
.
(18.20)
Фазовая модуляция S(t) = Acos[ω0t + Δφma(t)]
 .
(18.21)
.
(18.21)
Частотная модуляция

 .
(18.22)
.
(18.22)
Из (18.20 – 18.22) следует, что при АМ (m = 1) помехоустойчивость можно увеличить лишь за счет увеличения мощности сигнала; при ФМ и ЧМ помехоустойчивость можно увеличить также путем увеличения индексов модуляции Δφm и , что достигается за счет расширения спектра сигнала.
Все широкополосные системы модуляции обеспечивают высокую помехоустойчивость h22 при условии, что отношение сигнал-помеха на входе h12 больше некоторого порогового значения (рис. 18.5). При h12 < h12пор широкополосные системы теряют свои преимущества (резко снижается помехоустойчивость); возникающее при этом явление называют явлением порога помехоустойчивости.
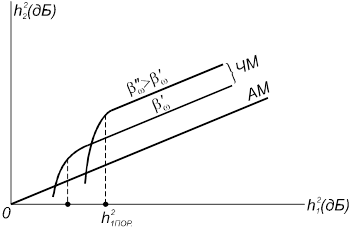
Рис. 18.5. Графики Gε(ω) для АМ, ФМ и ЧМ в соответствии с 18.20 – 18.22
19. Адаптивные устройства подавления помех
19.1. Основы адаптивного подавления помех
Основополагающая схема подавления помех показана на рисунке 19.1. Сигнал передается по каналу на приемное устройство, которое принимает смесь сигнала и не коррелированной с ним помехи п0. Смесь сигнала и помехи s + п0 является входным сигналом устройства подавления. Другое приемное устройство принимает помеху п1, не коррелированную с сигналом, но некоторым неизвестным образом коррелированную с помехой п0. В нем формируется «эталонный сигнал» для устройства подавления. В результате фильтрации помехи п1, формируется сигнал у, который приблизительно представляет собой копию п0. Этот сигнал вычитается из входного сигнала s + п0,для того, чтобы сформировать выходной сигнал системы s + п0 - у.
В общем случае при известных характеристиках каналов, по которым помеха поступает на оба приемных устройства, можно синтезировать фильтр с постоянными параметрами, преобразующих п1 в у = п0. Тогда выходной сигнал фильтра можно вычесть из входного сигнала, и на выходе системы останется один сигнал.
Однако применение фильтра с постоянными параметрами не обеспечивает гибкости, поскольку считают, что характеристики трактов передачи или неизвестны, или известны только приблизительно и могут изменяться. Более того, даже если фильтр с постоянными параметрами обеспечивает гибкость, его параметры нужно настраивать с точностью, которая трудно реализуется, и малейшая ошибка может привести к увеличению на выходе системы мощности помехи.
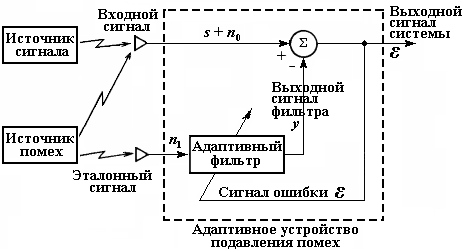
Рис. 19.1. Иллюстрация процесса адаптивного подавления помех
В приведенной на рисунке 19.1 системе эталонный сигнал обрабатывается адаптивным фильтром, который автоматически перестраивает свою собственную импульсную характеристику по одному из среднеквадратических алгоритмов (например, по методу наименьших квадратов), функционирующему по сигналу ошибки, зависящему помимо всего прочего, от выходного сигнала фильтра. Таким образом, при правильном алгоритме фильтр может работать в изменяющихся условиях и перестраиваться для минимизации сигнала ошибки.
Выбор используемого для процесса адаптации сигнала ошибки зависит от конкретной области приложения. Практическое назначение систем подавления помех – формирование выходного сигнала системы s + n0 - y который имеет наилучшее в среднеквадратическом смысле приближение к сигналу s. Это достигается тем, что выходной сигнал системы подаётся на адаптивный фильтр, который перестраивается по некоторому адаптивному алгоритму так, чтобы минимизировать общую мощность выходного сигнала системы. Другими словами, в системе с адаптивным подавлением помех сигналом ошибки адаптивного процесса является выходной сигнал системы.
Можно предположить, что для синтеза фильтра или его адаптации с целью формирования сигнала у, компенсирующего помеху, необходимы некоторые априорные сведения о сигнале s или помехах п0 и п1. Однако как будет показано далее, этого не требуется или почти не требуется.
Пусть s, п0, п1 и у – стационарные случайные процессы с нулевыми средними значениями, и s не коррелирован с п0 и п1, а п0 и п1 – коррелированы. Выходной сигнал
ε = s + n0 - y. (19.1)
Возведем обе части равенства в квадрат:
ε2 = s2 + (n0 - y) 2 + 2s (n0 - у). (19.2)
Для обеих частей (19.2) найдем математическое ожидание и, поскольку s не коррелирован с n0 и у, получим
E[ε2] = E[s2] + Е[(n0 - у)2] + 2E[s(n0 - у)] = E[s2] + Е[(n0 - у)2]. (19.3)
Мощность сигнала E[s2] не изменяется при перестройке фильтра в процессе минимизации E[s2]. В соответствии с этим минимальная мощность выходного сигнала
Emin[ε2] = E[s2] + Еmin[(n0 - у)2]. (19.4)
Если фильтр построен так, что E[s2] минимально, то, следовательно, минимально также и Е[(n0 - у)2]. В этом случае выходной сигнал фильтра у является наилучшей среднеквадратической оценкой помехи n0. Более того, при минимальном значении Е[(n0 - у)2] минимальное значение имеет также и E[(ε - s)2], поскольку из (19.1)
(ε - s) = (n0 - у). (19.5)
Таким образом, перестройка или адаптация фильтра для минимизации общей мощности выходного сигнала равносильна тому, что при заданных структуре адаптивного фильтра и эталонном входном сигнале выходной сигнал ε изменяется так, что он является наилучшим в среднеквадратическом смысле приближением сигнала s.
В общем случае выходной сигнал ε равен сумме сигнала s и некоторой помехи. В соответствии с (19.1) помеха на выходе равна п0 - у. Поскольку при минимизации E[ε 2] осуществляется минимизация E[(n0 - у)2], то минимизация общей мощности выходного сигнала приводит к минимизации мощности помехи на выходе и, так как сигнал на выходе остается постоянным, к максимизации выходного отношения сигнал-помеха.
Из (19.3) и (19.4) видно, что наименьшая возможная мощность выходного сигнала Emin[ε2] = E[s2]. Если это достижимо, то E[(n0 - у)2] = 0. Следовательно, у = п0 и ε = s, и минимизация мощности выходного сигнала приводит к тому, что сигнал совершенно не искажен помехой.
Кроме того, если эталонный сигнал совсем не коррелирован с входным сигналом, то фильтр отключается и не увеличивает помеху на выходе. В этом случае выходной сигнал фильтра у не коррелирован с входным сигналом и мощность выходного сигнала
E[ε2] = E[(s + n0) 2] + 2E [ -у (s + n0)] + E[y2] = -E[(s + n0)2]+ E[y2]. (19.6)
Для минимизации мощности выходного сигнала необходимо, чтобы было минимальным E[y2], что достигается при равенстве всех весовых коэффициентов нулю, приводящим к тому, что E[y2] = 0.
Эти рассуждения легко распространить на случай, когда входной и эталонный сигналы содержат, помимо n0 и п1, составляющие аддитивного случайного шума, не коррелированные между собой и с s, n0 и п1. Кроме того, эти рассуждения справедливы для случая, когда n0 и п1 – детерминированные, а не случайные сигналы. Отметим, что в процессе рассуждений не оговорено, что адаптивный фильтр обязательно сходится к линейному фильтру.